全液压振动式红枣采摘设备的设计和研究
2016-03-07鲁泽超阿木提苏浩毅
鲁泽超, 史 勇,2*, 肉 孜·阿木提,2, 苏浩毅, 王 旭
(1. 新疆农业大学机械交通学院,新疆乌鲁木齐 830052;2. 新疆农业工程装备创新设计重点实验室,新疆乌鲁木齐 830052)
全液压振动式红枣采摘设备的设计和研究
鲁泽超1, 史 勇1,2*, 肉 孜·阿木提1,2, 苏浩毅1, 王 旭1
(1. 新疆农业大学机械交通学院,新疆乌鲁木齐 830052;2. 新疆农业工程装备创新设计重点实验室,新疆乌鲁木齐 830052)
摘要红枣采摘作业是林果业生产中非常重要的环节。红枣采摘机械的使用可以解决人工采摘红枣时所出现的劳动强度大、效率低、成本高等不足。将液压技术应用到红枣采摘机械设备中,可使设备具有传递功率大、结构简单、传动平稳等优点。设计出一种全液压振动式红枣采摘设备,依靠液压系统驱动偏心装置使其产生振动来完成红枣的采摘,该设备结构简单、设计合理、操作方便,可为同类型林果类采摘设备的设计和研发提供一定的参考价值。
关键词全液压;振动;红枣采摘;设计
红枣是一种营养佳品,被誉为“百果之王”,其营养保健作用在远古时期就被人们发现并利用。新疆是我国红枣的主要生产地,红枣种植面积大、产量高,但是大多数仍采用人工采摘方式,劳动强度大、效率低、成本高,在收获期容易出现劳动力紧缺,使红枣不能及时收获,严重影响新疆红枣产业的健康发展[1-2]。
目前国内外开展了各类振动式红枣采收机械的研制工作,研究表明,通过摇振树枝或树干实现对红枣的采收是可行的[3]。振动式采摘设备主要分为偏心振动式、曲臂连杆式、气力振动式等,其中偏心振动式的红枣采摘设备体积更小,工作更加平稳,采摘效率更高。新疆大部分果园都采用矮化密植模式,机械化作业的空间较小,作业条件差,因此国外的大型采收机械都不适合新疆地区红枣的采收[4]。国内针对矮化密植果园采摘类机械的研制也做了大量研究。新疆农垦科学院机械装备研究所研制了4YS-24型红枣收获机,该设备采摘效率虽然较高,但是要求树干的夹持高度在80 cm以上[5]。石河子大学的孙雨等研制了4ZZ-4型全液压驱动自走式红枣收获机[6],该设备虽然结构简单、传动平稳,但是无法实现对机械手振动的振幅和频率进行调节。
笔者针对新疆地区果园矮化密植模式的特点,设计了一种全液压振动式红枣采摘设备,利用偏心块正反转产生的激振力实现对枣树的摇振,完成对红枣的采摘。该装置结构紧凑,设计合理,可以实现偏心块的振幅和频率调节,适合矮化密植式果园中红枣的采摘。
1总体方案和设计要求
1.1总体方案全液压振动式红枣采摘机的设计需要充分发挥机械及液压技术的特性,最大限度地利用机械结构和液压装置对红枣进行采摘并且保证采摘的质量和采净率。机械化采摘是整个生产环节里的重要部分,所以红枣机械化采摘机技术研究是未来发展的主要趋势。
该项目的设计要求是结合新疆红枣采摘的实际情况,设计一种专用的液压式红枣采摘机,该设备既能通过激振力的方式实现水果的采摘收获,同时,机械本身还具有举升和回转装置,利用液压缸和相应的机械机构,实现工作装置的举升和回转。对采摘设备的要求是:在振动采摘过程中应减少对树枝的折断,能够对振动装置的频率进行调节,振动装置与配套动力机械应能够相互协调。
1.2设计要求具体设计要求如下:①振动液压马达的频率调节范围为0~25 Hz。②适用果树主干直径为90~400 mm。③夹持主干位置最低距离地面高度为0.6 m。④适用果树行距为2.0 m以上的果园,以满足密植果园作业空间小的要求。⑤采摘机采用带有后置动力输出轴的拖拉机牵引,配套牵引拖拉机动力范围为15~35 kW。
2总体结构设计及工作原理

注:1.夹持手臂;2.振动液压马达;3.伸缩液压缸;4.伸缩大臂;5.举升液压缸;6.回转底座;7.液压泵;8.液压油箱;9.支撑架;10.操控台;11.振动箱;12.夹持液压缸;13.回转液压马达;14.牵引架。Note: 1. Clamp arm; 2. Vibration hydraulic motor; 3. Telescopic hydraulic cylinder; 4. Telescopic boom; 5. Lifting hydraulic cylinder; 6. Rotary base; 7. Hydraulic pump; 8. Hydraulic oil tank; 9. Carriage; 10. Control console; 11. Vibrating case; 12. Clamping hydraulic cylinder; 13. Rotary hydraulic motor; 14. Traction frame.图1 全液压振动式红枣采摘机总装图Fig.1 General assembly drawing of full hydraulic vibration type red jujube picking equipment
2.1总体结构设计采摘机总体结构如图1所示,由激振机构、夹持机构、液压传动系统、机架组成,采摘机采用拖拉机后牵引。激振机构包括偏心轮、带动偏心轮旋转的振动液压马达和振动箱。夹持机构包括固定夹持手臂和夹持液压缸。液压传动系统主要由伸缩液压缸、伸缩大臂、举升液压缸、液压泵、输油管以及液压阀等组成。总装图如图1所示。2.2工作原理全液压振动式红枣采摘机是基于通过对果树主干施加机械振动,使果树产生受迫振动,从而带动果实做加速运动,果实产生的惯性力大于果实与树枝的结合力时,果实就会从树上掉落[7]。
该设计的源动力为牵引拖拉机后置动力输出轴。牵引拖拉机将动力传输至后置动力输出轴,然后,动力输出轴与万向联轴器相连的液压泵连接,通过液压泵将油压分别传递到振动总成中的振动液压马达及各液压元件。
工作时,通过调节举升液压缸的伸缩,使夹持机构调节到夹持树干的合适高度位置。通过调节伸缩液压缸,同时推出伸缩大臂中的加长臂带动振动箱向外伸缩。当振动箱调节到适合夹持树干的位置时,调节振动箱下部的调平油缸,使夹持机构保持水平。调节夹持液压缸的伸缩,使夹持手臂水平夹持住主干,随后启动液压马达带动偏心轮旋转,偏心轮产生的激振力通过夹持机构传递给果树主干,使果树产生一定频率及振幅的受迫振动(图2)。

图2 全液压式红枣采摘机工作图Fig.2 Working drawing of full hydraulic vibration type red jujube picking equipment
2.3设计功能该红枣采摘设备设计的主要功能如下:①控制振动液压马达转动,可带动偏心轮旋转后振动,带动振动箱振动树干。②控制偏心轮的旋转方向,可调节振动幅度和振动频率。③控制大臂的举升高度,可调节夹持手臂对不同高度树木的夹持位置。④控制大臂的伸出长度,可对工作半径内的树木进行采摘,减少采摘机移动次数。⑤控制回转底座的旋转角度,可同时实现对采摘机左右两侧的果树进行采摘。
3主要零部件的设计
3.1振动机构的设计振动机构是将动力源的运动和动力进行转换并输出与传递的装置,根据振动产生原理,振动机构可分为三大类,即偏心振动机构、轴向振动机构和多边形冲击机构。
全液压式红枣采摘机采用偏心振动机构,其激振力来自其内部的偏心轮作圆周运动时的离心力。所以,偏心轮是振动机构最主要的元素之一。
该设计采用偏心振动机构,有2种工作模式:一是高频低振幅模式(图3),二是低频高振幅模式(图4)。2种模式是通过调节振动液压马达(图5)旋转方向进行切换,2种模式的切换增加了可采摘果树的适用范围,同时减少了单一模式对小树的损伤。振动箱装配图如图6所示。
3.2夹持机构的设计采摘机夹持机构的设计参数主要是夹紧力,夹紧力控制的大小都会影响到树干,进而影响采摘效果。夹紧力不足,会对树干夹持不紧,影响激振力的传递;夹紧力过大,会对树干的树皮以及其他结构组织造成不同程度损伤。为了保护果树,因而在能保证可靠夹紧的情况下,应使夹紧力适当[7]。
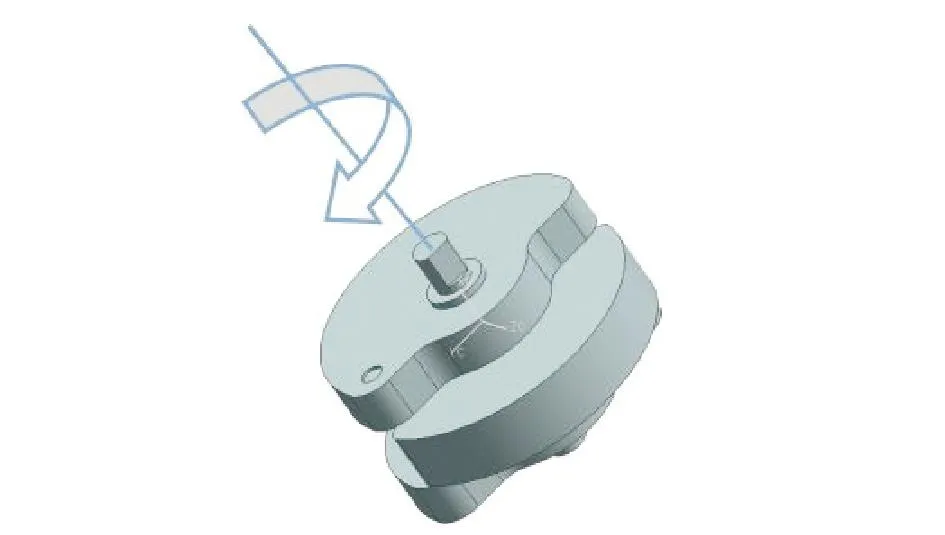
图3 偏心轮高频低振幅模式Fig.3 High frequency low amplitude mode of eccentric wheel
计算夹紧力时参照机器人手部夹紧力的计算公式:
F≥K1K2K3G
式中,F为夹紧力(N);K1为安全系数;K2为工作情况系数;K3为方位系数;G为采摘头所受的重力。
计算时取K1=1.5;由于果树是静态的,所以取K2=1;取K3=1.25;利用UG软件对采摘头进行建模,并且对其质量属性进行分析,得到其质量为100 kg,采摘头所受的重力G=100×10=1 000N,计算夹紧力为:
F≥1.5×1.25×1 000=1 875 N

图4 偏心轮低频高振幅模式Fig.4 Low frequency and high amplitude mode of eccentric wheel

图5 振动液压马达Fig.5 Vibration hydraulic motor

图6 振动箱装配Fig.6 Vibration box assembly
4液压系统的设计
全液压振动式红枣采摘设备的液压系统采用多回路控制[8],如图7所示。其动力元件为液压泵(变量叶片泵),由牵引拖拉机的后置动力输出轴通过万向联轴器带动,液压油缸控制回路采用多路换向阀并联的方式,利用6个换向阀控制4组液压缸和2个液压马达的动作。其中,总阀是两位两通换向阀,做为整套液压系统的开关;图7中编号5、10、15的控制阀是三位四通O型换向阀,分别控制着大臂举升液压缸、大臂伸缩液压缸、振动箱调平液压缸;图7中编号19、23、27的控制阀是三位四通型Y型换向阀,分别控制振动箱的2个夹持手臂动作的液压缸,以及驱动振动液压马达和回转液压马达转动。溢流阀用来调整整个系统的压力,使系统具有较为稳定的压力。
液压传动系统的优点很多,与电气传动相比,液压系统工作比较平稳,由于重量轻、惯性小、反应快,液压装置易于实
注:1.油箱;2.总阀;3、8、13.减压阀;4、6、9、11、14、16、18、20、22、24、26、28.节流阀;5.举升控制阀;7.举升液压缸;10.伸缩控制阀;12.伸缩液压缸;15.调平控制阀;17.调平液压缸;19.夹紧控制阀;21.夹持液压缸组合;23.回转控制阀;25.回转液压马达;27.振动控制阀;29.振动液压马达;30.溢流阀;31.液压泵。Note: 1. Oil tank; 2. Master valve; 3, 8, 13. Pressure relief valve; 4, 6, 9, 11, 14, 16, 18, 20, 22, 24, 26, 28. Throttling valve; 5. Lifting control valve; 7. Lifting hydraulic cylinder; 10. Telescopic control valve; 12. Telescopic hydraulic cylinder; 15. Leveling control valve; 17. Leveling hydraulic cylinder; 19. Clamping control valve; 21. Clamping hydraulic cylinder combination; 23. Rotary control valve; 25. Rotary hydraulic motor; 27. Vibration control valve; 29. Vibration hydraulic motor; 30. Overflow valve; 31. Hydraulic pump.图7 液压系统原理Fig.7 Hydraulic system principle
新构建进行研究,以期为苏州市资源节约型和环境友好型社会综合配套改革试验与城乡统筹发展战略的实施服务,为苏州市城镇村体系规划和镇村布局规划的编制提供依据,并且为苏州市镇村的产业发展、农村社区建设等提供模式借鉴。
参考文献
[1] 赵佩佩,顾浩,孙加凤.新型城镇化背景下城乡规划的转型思考[J].规划师,2010,30(4):95-100.
[2] 彭震伟, 高璟.长江三角洲地区小城镇村镇空间布局的影响因素及其作用机制[C]//城乡规划新思维.北京:中国建筑工业出版社,2007:278.
[3] 杨宏杰.苏州城乡地区空间管治研究[D].苏州:苏州科技学院, 2008:18.
[4] 张振龙.城乡一体化规划理论与实施机制研究:以苏州市为例[J].现代城市研究, 2012(4): 15-20.
[5] 万艳华,艾志诚.三农问题与小城镇规划革新[J].小城镇建设,2004(6):54-56.
[6] 苏州市规划局,苏州规划设计研究院股份有限公司.苏州市区镇村布局规划[A].2014.
[7] 杨新海,洪亘伟,赵剑锋.城乡一体化背景下苏州村镇公共服务设施配置研究[J].城市规划学刊, 2013(3):22-27.
[8] 李强,严金明.武汉市城市边缘区村镇发展模式与土地利用政策研究[J].地理与地理信息科学,2012,28(2):76-79.
[9] 赵书彬.风景名胜区镇村体系研究[D].上海:同济大学,2007:25.
Design and Research of Full Hydraulic Vibration Type Red Jujube Picking Equipment
LU Ze-chao1, SHI Yong1,2*,ROUZI·Amuti1,2et al (1. College of Mechanic and Traffic, Xinjiang Agricultural University, Urumqi, Xinjiang 830052; 2. Key Laboratory for Agricultural Engineering Equipment Innovative Design of Xinjiang, Urumqi, Xinjiang 830052)
AbstractRed jujube picking is a very important link in the production of fruit industry. The use of red jujube picking machine can solve problems of artificial picking jujube, such as high labor intensity, low efficiency and high cost. The hydraulic technology is applied to the red jujube picking machine, which can make the equipment has the advantages of high transmission power, simple structure, stable transmission and so on. In this paper, a kind of full hydraulic vibration type jujube picking equipment was designed, relying on the hydraulic system to drive an eccentric device to produce vibration to complete the jujube picking. The equipment has the advantages of simple structure, reasonable design, convenient operation, which can provide a certain reference for design and development of the same type of fruit picking equipment.
Key wordsFull hydraulic; Vibration; Red jujube picking; Design
收稿日期2015-12-07
作者简介鲁泽超(1992- ),男,山东临沂人,从事农业机械研究。*通讯作者,讲师,从事农产品加工、液压传动与控制、数控技术等研究。
基金项目新疆维吾尔自治区大学生创新创业训练计划项目(201510758048)。
中图分类号S 225.93
文献标识码A
文章编号0517-6611(2016)02-313-03