车辆转向稳定性控制策略联合仿真*
2016-03-04李胜琴
李胜琴 杨 庆
(东北林业大学交通学院 哈尔滨 150040)
车辆转向稳定性控制策略联合仿真*
李胜琴杨庆
(东北林业大学交通学院哈尔滨150040)
摘要:本文对车辆在转向行驶过程中稳定性的控制策略进行研究.在ADAMS/Car中建立整车系统模型并加以验证.根据车辆失稳的主要原因,在MATLAB/Simulink中设计以控制各车轮制动力为目标的控制器,依据模糊控制理论建立车辆转向稳定性控制联合仿真模型,在不同路面附着系数下,分别针对双移线、正弦延迟及蛇形工况下车辆进行仿真试验,分析在有无控制下车辆横摆角速度和质心侧偏角的变化.仿真结果表明,施加控制的车辆行驶路径保持较好,横摆角速度和质心侧偏角能够得到很好的控制,车辆行驶稳定性得到保障,证实了控制策略的有效性.
关键词:转向稳定性;ADAMS/Car;模糊控制;联合仿真
李胜琴(1976- ):女、工学博士,副教授,主要研究领域为车辆系统动力学及控制
*国家自然科学基金青年基金资助项目(批准号:51205055)、中央高校基本科研业务费专项资金项目(批准号:DL13CB07)资助
0引言
据不完全统计,仅在过去的10 a当中,我国就有近90万人死于各类道路交通事故.相关专业部门分析了导致这种严重伤亡交通事故的原因,结果显示,超过60%的事故都是因为发生了侧向失稳碰撞,30%~40%的事故起因是超速行驶、突然转向或者操作不当;而据另一项数据统计显示,车辆行驶速度越高就越容易发生交通事故,当车速在80~100 km/h范围内时,与车辆侧向失稳有关的事故大概约占到40%,当车速超过160 km/h时,全部交通事故几乎都由侧向失稳造成[1-2].所以提高车辆的安全性,尤其是提高车辆高速转向时的主动安全性成为汽车设计及研发人员面对的一项艰巨任务.
国外学者对车辆稳定性控制算法进行了大量理论性的研究.Buckholtz[3]研究的重点是如何通过分配车轮的滑移率,进而在模糊控制理论的基础上控制车辆的横摆角速度和质心侧偏角;Toshihiro Hiraoka等[4]也对车身横摆角速度和质心侧偏角的控制进行了研究,但他们是以滑模变结构控制理论作为研究的理论基础;Masao Nagai等[5]在控制车辆稳定性的时候,采用的是复合反馈的方法;van Zanten等[6]基于最优控制原理开发了Bosch被广泛应用的电子稳定程序——ESP.国内对汽车操纵稳定性的研究始于上世纪70年代,起步比较晚.由于缺少试验条件,大多数学者只是基于理论研究,通过仿真的形式,提出ESP系统的设计中具体遇到的问题,他们研究的侧重点各有不同,一部分学者探讨的是ESP系统具体实现问题,一部分学者把研究重点放在控制算法的验证上.宋健等[7]对ABS系统中的电磁阀特性进行了分析,并在此基础上讨论了ESP的控制算法及策略;上海交通大学开展的“汽车动力学控制系统开发与实车试验”项目,建立了ESP混合仿真模拟试验台并在试验台的基础上研究了ESP系统的动态特性,为国内对ESP系统的深入研究提供了极具参考价值的数据和经验[8];刘昭度等[9]从集成化液压控制单元及液压特性方面入手,进行ESP集成控制系统的研究;郭孔辉等[10-11]在ESP控制算法和ESP系统评价方法方面做了大量深入的研究,应用逻辑门限值方法,分析车辆在不同状态下的控制逻辑,并且根据人-车-路闭环系统模型,对ESP系统进行评价.除了各大高校,中国重汽集团、上海大众、奇瑞等汽车企业也在车辆稳定性控制方面开展了研究工作.
文中以车辆转向稳定性作为研究重点,利用仿真软件ADAMS建立车辆动力学模型并与MATLAB结合进行联合仿真,以车身的横摆角速度和质心侧偏角作为控制目标建立模糊控制器,进行车辆转向稳定性的模拟仿真,与试验结果对比,并验证控制策略的有效性.
1车辆动力学模型
汽车是由几万个零部件组成的,而整车建模又是一个极其复杂的过程,对车辆的真实结构进行建模,工作量大,若根据研究目的的不同,对车辆结构进行相应的、合理的简化,操作起来更为方便的同时又能得到比较合理的研究结果.
ADAMS/Car是ADAMS软件的模块之一,是一种基于模板建模和仿真的工具,简化了建模的步骤并加快了建模的速度,用户只需要在模板中输入数据,就可以快速的建立高精度整车虚拟样机模型,模型中包括车身系统、悬架系统、传动系统、发动机、转向机构系统、制动系统等.
本文根据给定的某车型基本参数确定硬点坐标及各部件之间的连接,建立各系统模型.图1中a)~f)为建立好的各系统模型.把建立好的各个子系统模型组装即可创建整车模型,建立好的整成模型见图2.
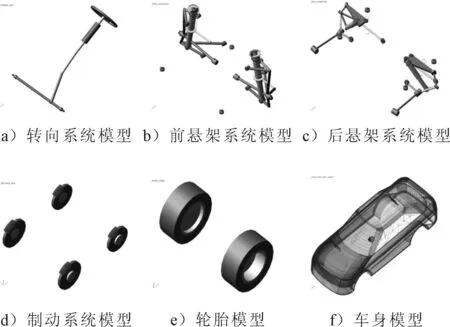
图1 各子系统模型
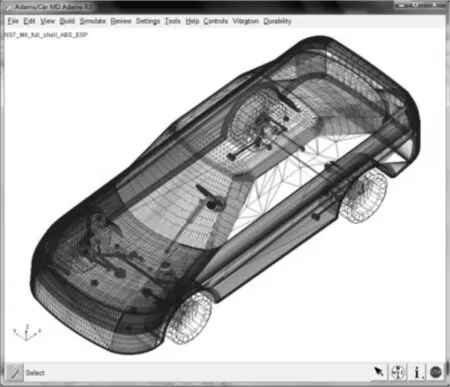
图2 整车动力学模型
为了验证所建立的整车动力学模型是否正确、有效,进行干路面工况下的车辆转向稳定性的一系列仿真试验,并与实车路上试验数据进行对比.
运用ADAMS/Car软件进行转向稳定性的仿真,首先需要编写与整车转向稳定性试验相关的数据文件,包括驱动控制文件和驱动控制数据文件.在驱动控制试验中,将转向盘转向、节气门开度、离合器开合、档位大小和制动等作为控制变量,通过改变它们的数值,来完成整车转向稳定性的仿真与结果分析.
图3为干路面工况下双移线的试验值及模拟值的比较,档位为三档、车速为40 km/h,仿真时间7 s,步长0.01 s,μ=0.8;图4为三档档位、车速40 km/h,仿真时间12 s,步长0.01 s时在干路面工况下蛇形绕障试验的试验值与模拟值比较,μ=0.8.
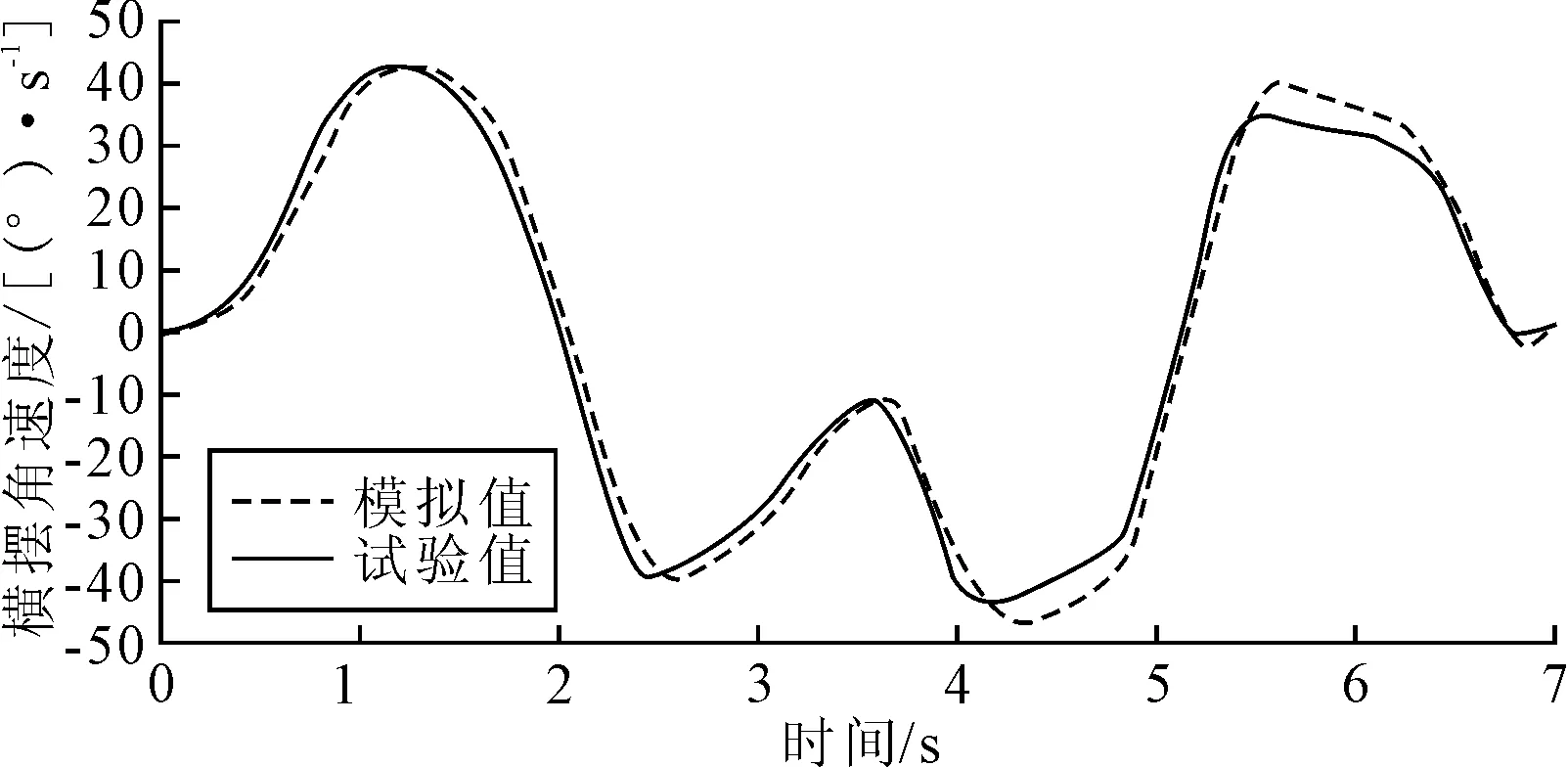
图3 双移线试验车辆横摆角速度对比

图4 蛇形试验车辆横摆角速度对比
由图3、图4可见,所建立的整车动力学模型的仿真结果与试验结果吻合较好,认为所建模型准确,可以用来进行整车动力学性能的仿真分析,两者之间未能完全重合可能是由于建立模型时对各系统进行了相应的简化造成的.
2联合仿真模型
采用目前广泛应用的二维模糊控制器.具体说来就是选取车辆的实际横摆角速度、实际质心侧偏角与车辆参考模型的理想横摆角速度、理想质心侧偏角之间的误差e以及误差变化率ec作为模糊控制器的输入变量,模糊控制器的输出变量设为车轮的制动力矩u.控制器将根据输入变量的变化,计算出所需要的制动力矩的大小,最后由制动力分配器通过各个车轮上的控制器进行制动力的分配,最主要的目标就是使这两个参数的理想值和实际值的偏差达到最小.在实际应用中为了表达的更清楚,一般用模糊规则表的形式见表1.
最后,由输入变量、输出变量的隶属函数及模糊控制规则建立起来的双输入、单输出的Mamdani模糊控制器见图5,建立完成之后保存到仿真文件夹中以备调用.设计的模糊控制模型见图6.
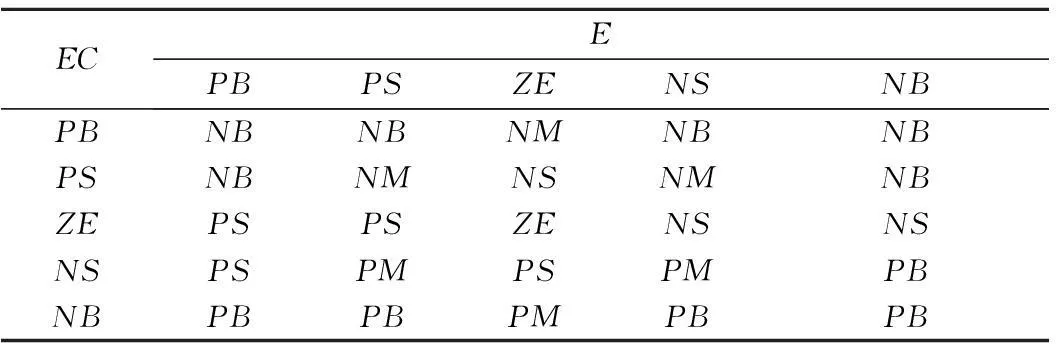
表1 模糊规则表

图5 模糊控制器
在ADAMS/Car中设置4个输入变量为:左前轮制动力矩、左后轮制动力矩、右前轮制动力矩、右后轮制动力矩.4个输出变量为:横摆角速度、纵向速度、方向盘转角、质心侧偏角.建立联合仿真模型见图7.
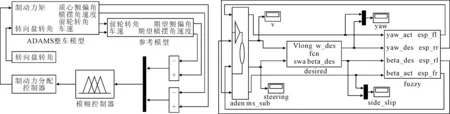
图6 模糊控制模型 图7 联合仿真模型
图中“adams_sub”模块是由ADAMS/Car导出的S-function模块,这个模块包含了整车的全部信息;“desired”模块为线性二自由度理想模型,它完成车辆期望状态参数的计算,“fuzzy”模块是联合仿真系统的核心,即制动力分配器,它主要完成车辆稳定性判断和制动力的分配.
3控制策略验证
3.1双移线仿真
3.1.1干路面仿真
在干路面时,设定双移线工况为三档档位、车速v=60 km/h、路面附着系数μ=0.8,仿真时间t=5 s、仿真步长0.01 s.仿真分析曲线见图8~9.可以看出,在未施加控制时,车身从2.5 s便开始有明显抖动,横摆角速度和质心侧偏角迅速变化,车体发生严重侧偏,失去稳定性,偏离轨迹,驶离车道,说明此时可能已出现侧滑或甩尾现象,易导致交通事故.而有控制时车辆能够按照试验路径行驶,维持稳定状态,安全性得到了保障.

图8 干路面双移线试验-横摆角速度
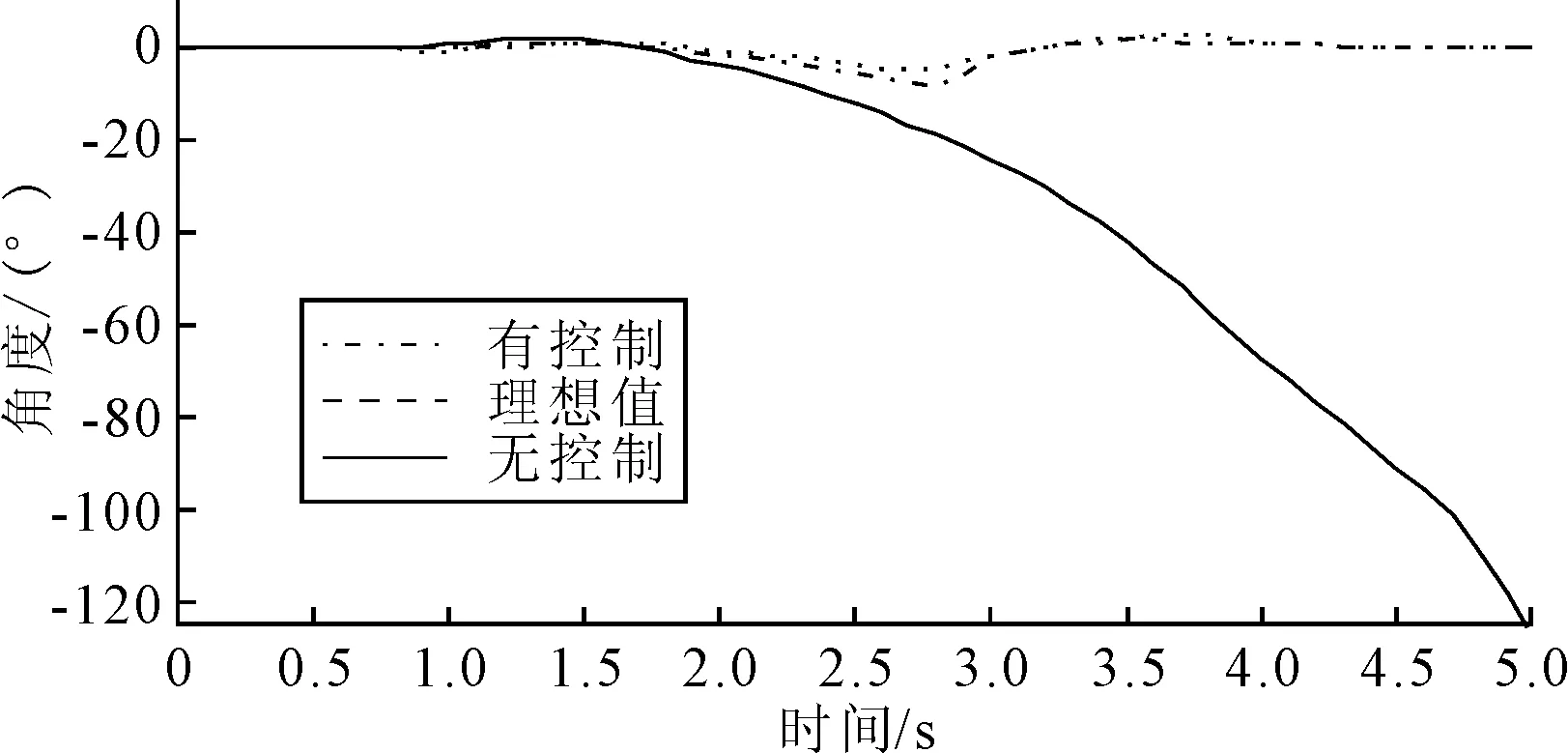
图9 干路面双移线试验-质心侧偏角
3.1.2冰雪路面仿真
将干路面试验的转向盘转角作为输入,进行冰雪路面条件下的双移线试验仿真,档位仍为三档、车速v=40 km/h、路面附着系数为μ=0.2、仿真时间t=5 s,仿真步长0.01 s.仿真曲线显示,在冰雪路面上,没有施加控制的车辆在开始阶段的行驶比较平稳,2.5 s时出现不稳定趋势,3.5 s之后完全失稳,横摆角速度和质心侧偏角的极速增大,车辆的最大横摆角速度达到了-3 (°)/s,质心侧偏角最大为-2.3°.而加入控制的车辆在整个行车过程中表现较好,得到的控制效果较为理想,横摆角速度和质心侧偏角的变化相对平缓,接近理想状态,见图10~11.
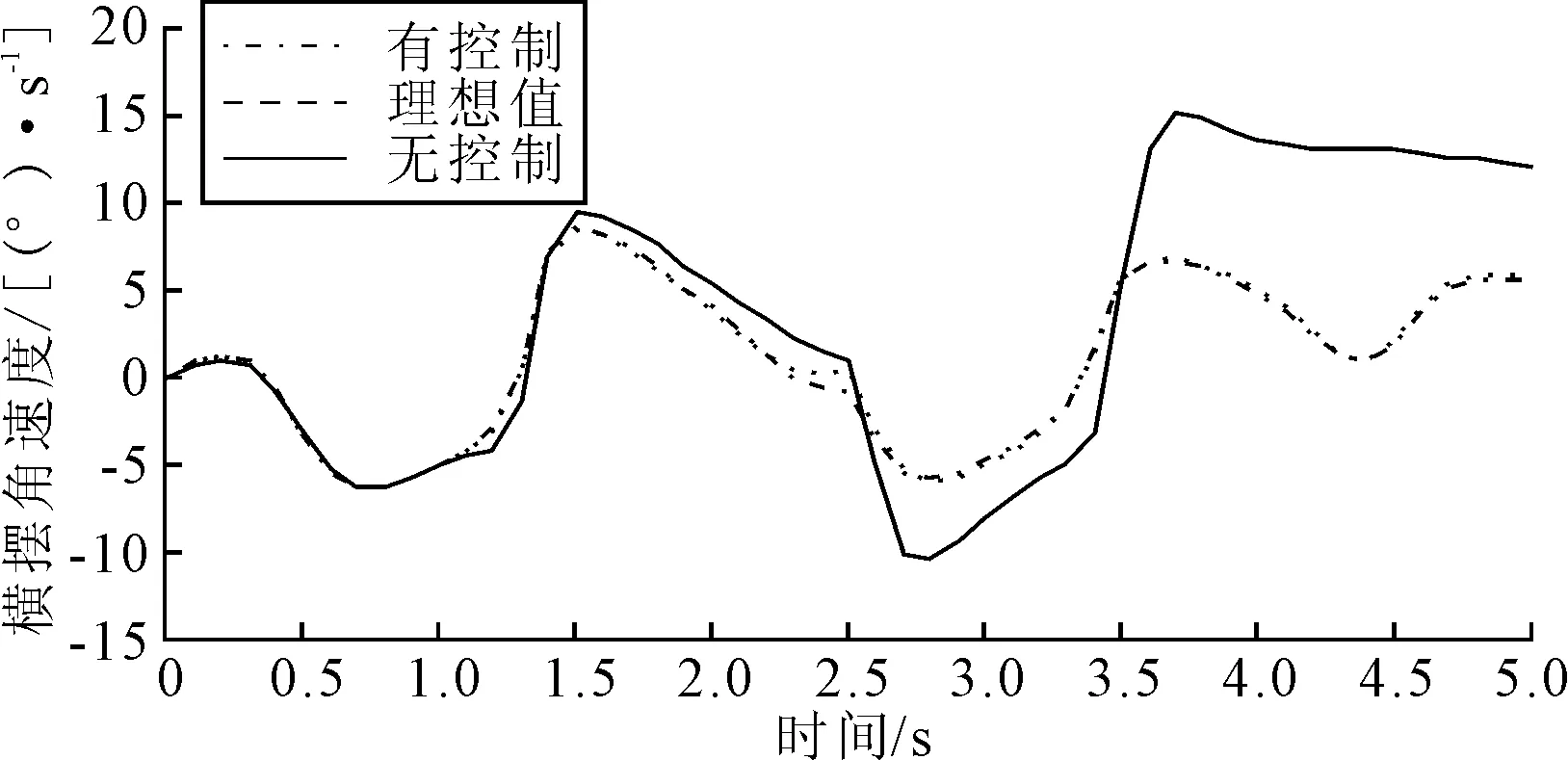
图10 冰雪路面双移线试验-横摆角速度

图11 冰雪路面双移线试验-质心侧偏角
3.2正弦延迟试验仿真
3.2.1干路面仿真
设定的工况为四档档位、车速v=80 km/h、路面附着系数为μ=0.8、仿真时间t=5 s,仿真步长0.01 s,仿真曲线见图12~13.根据曲线变化可知,没有施加控制的车辆在2 s之前可以保持车身的行驶姿态,3 s之后开始出现不稳定状况,3.5 s发生较为明显的抖动,随即失去控制,偏离轨迹,横摆角速度最大值达到50 (°)/s,侧偏角最大达到-14°.而加入控制的车辆,虽然相较于理想值较晚回正,但最终仍能保持运动轨迹,调整姿态后恢复稳定行驶状态,接近理想值,保证了安全.

图12 干路面正弦延迟试验-横摆角速度
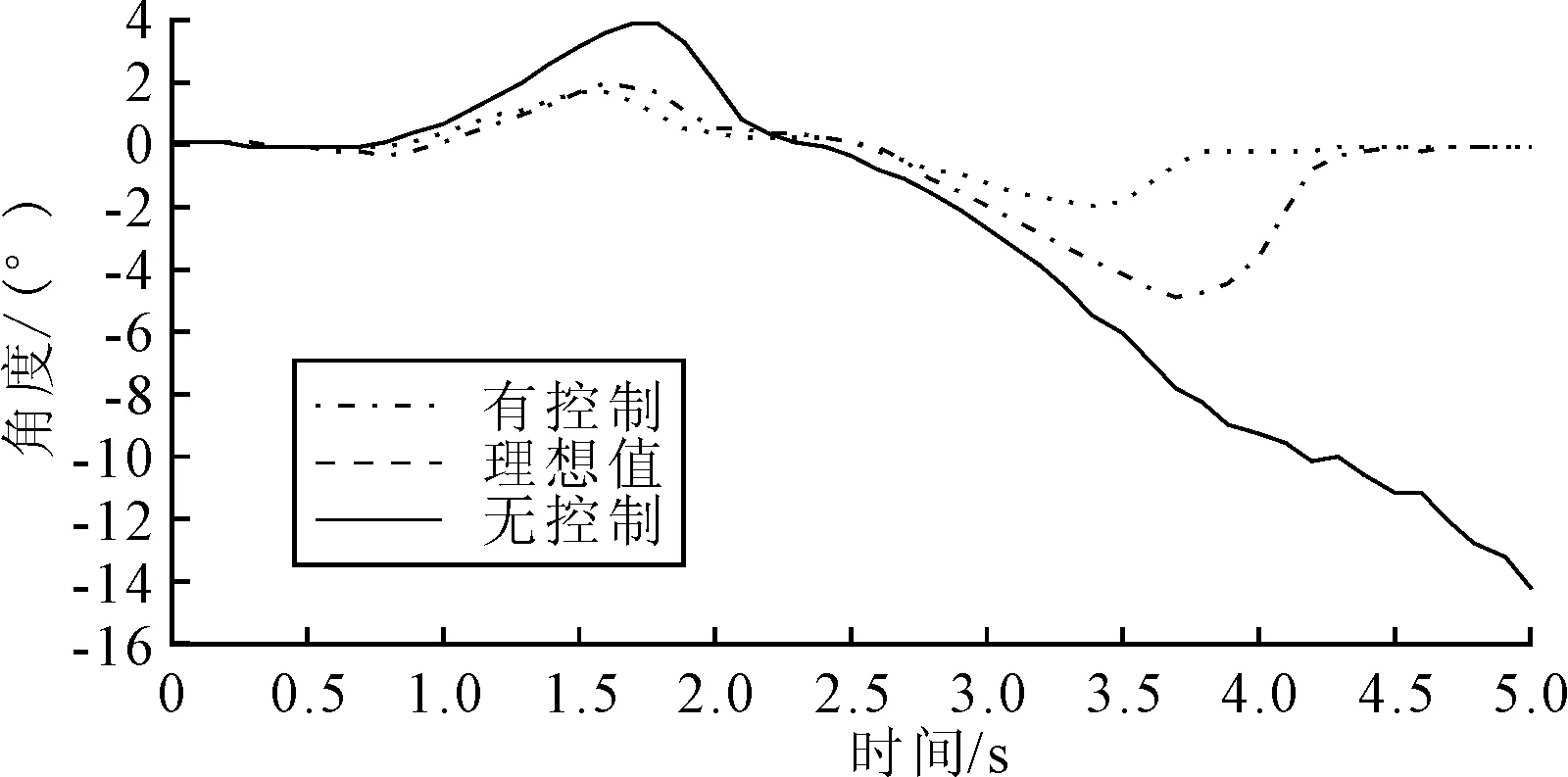
图13 干路面正弦延迟试验-质心侧偏角
3.2.2冰雪路面仿真
在这组冰雪路面的试验中,设定车速小于干路面时的车速,v=70 km/h、档位仍为四档、路面附着系数为μ=0.2、仿真时间t=5 s,仿真步长0.01 s,仿真曲线见图14~15.0~0.5 s时间内,未施加控制的车身保持运行平稳,0.5 s开始逐渐偏离运行轨迹,2.5 s时突然产生变化,车身侧偏严重并有甩尾现象;车辆在冰雪路面上行驶,车身有控制时,试验值与理想值之间有很小的差距,但整个运行过程中可以较好的保持行驶轨迹,能够保证车辆运行的安全性.
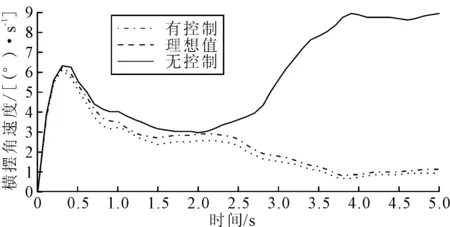
图14 冰雪路面正弦延迟试验-横摆角速度
3.3蛇形试验仿真
3.3.1干路面仿真
设定的工况为四档、车速v=70 km/h、路面附着系数为μ=0.8、仿真时间t=7 s,仿真步长0.01 s,仿真曲线见图16~17.没有施加控制的车辆在4.6 s时候失去控制,出现甩尾的情况,同时也发生较为严重的侧偏,最大侧偏角达到-38°;而加入控制的车辆,能够与理想值较为吻合,说明设计的控制器起到了一定的控制效果,可以使车辆一直保持较为理想的状态.
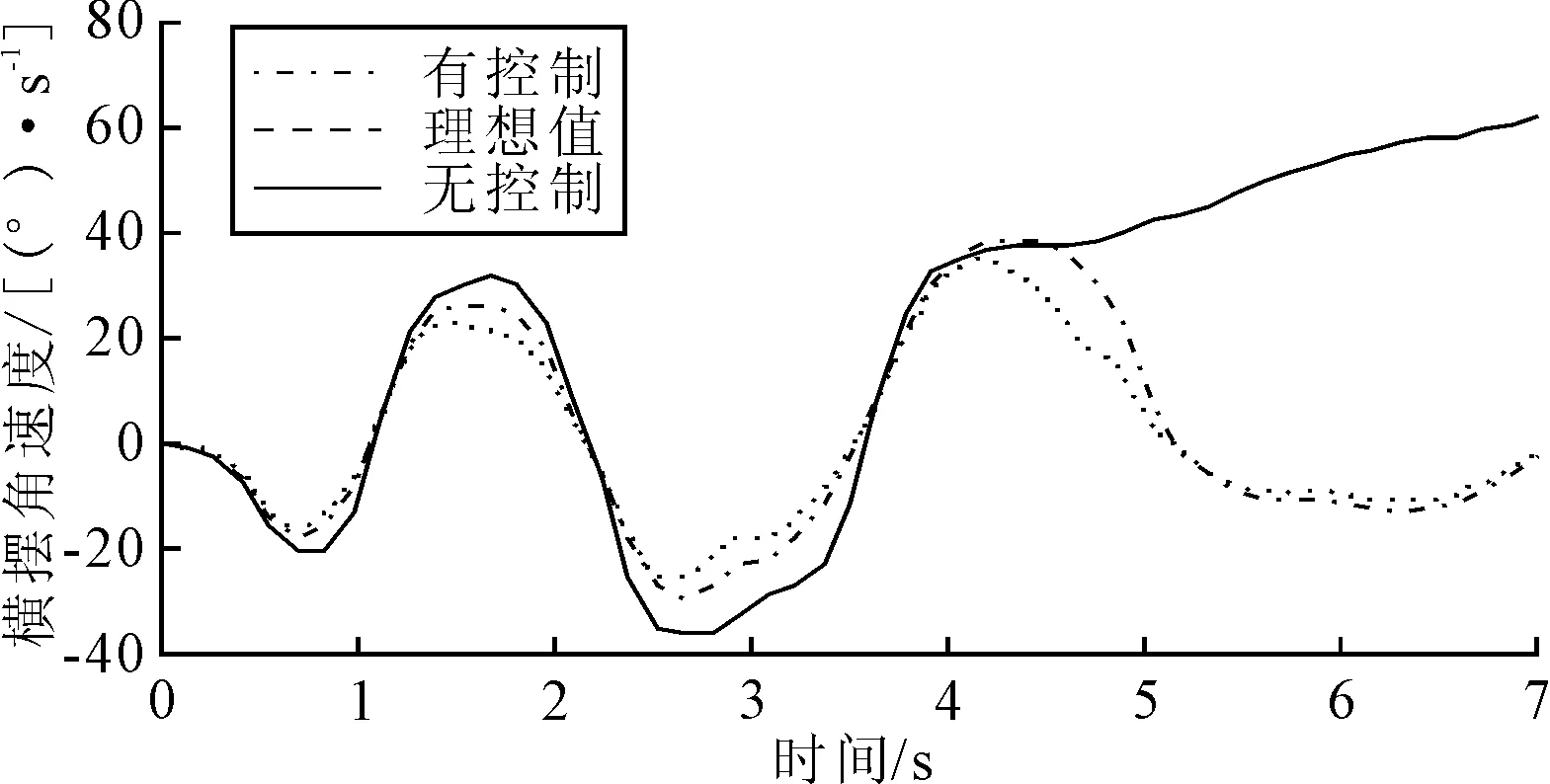
图16 干路面蛇形试验-横摆角速度
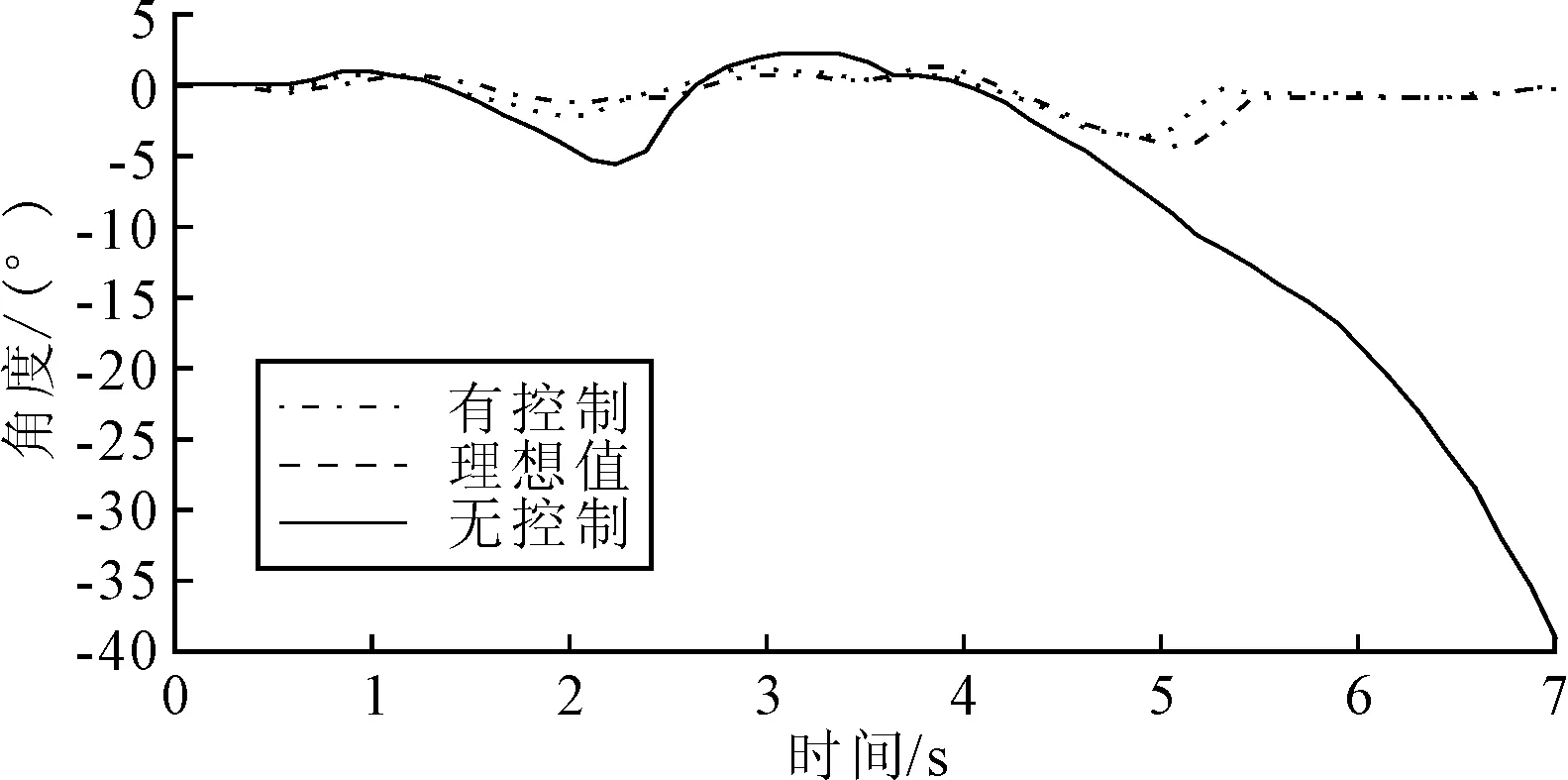
图17 干路面蛇形试验-质心侧偏角
3.3.2冰雪路面仿真
将冰雪路面蛇形试验的工况设定为三档、车速v=40 km/h、路面附着系数为μ=0.2、仿真时间t=7 s,仿真步长0.01 s,仿真曲线见图18~19.在没有施加控制的时候,0~2.3 s内的行驶较为稳定,但随即表现出了不稳定的趋势,2.3 s时突然失去控制,横摆角速度最大值达到-17°/s,侧偏现象明显,最后侧偏角达到51°,直接可能导致车身甩尾和侧偏,对汽车的行驶安全造成威胁,而加入控制之后便能很好的跟踪理想值的曲线,表现出了较好的稳定性,同时也保证了行驶的安全.
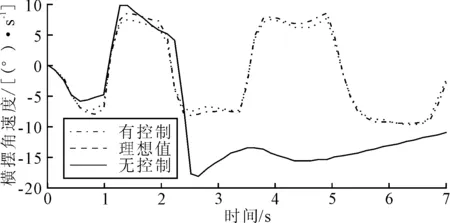
图18 冰雪路面蛇形试验-横摆角速度
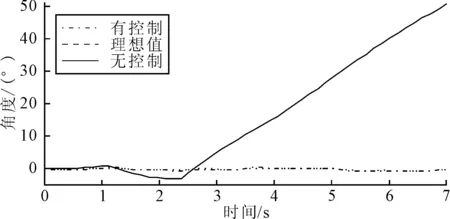
图19 冰雪路面蛇形试验-质心侧偏角
4结论
1) 以某型车为原型,利用ADAMS/Car建立包括前后悬架系统、制动系统等子系统在内的整车动力学模型,利用车辆试验数据对动力学模型加以验证,结果表明,所建立的动力学模型精度基本符合要求,能够用于车辆转向稳定性的仿真研究.
2) 对车辆转向失稳的原因进行分析,基于模糊控制理论,以车辆横摆角速度和质心侧偏角的误差及误差变化率为输入变量、车辆恢复稳定状态所需要的制动力矩为输出变量,设计模糊控制器,建立基于ADAMS/Car和MATLAB/Simulink的联合仿真模型.
3) 选择双移线、正弦延迟、蛇形等三种路径进行模拟仿真,设定不同的试验工况,分别在干路面和冰雪路面进行模拟试验,对车辆运动姿态进行比较分析.仿真分析结果表明,所建立的模糊控制策略,能够相对的针对车辆在转向过程中的出现的失稳状态加以控制,可有效维持车辆的行驶稳定性.
参 考 文 献
[1]NAGAI M. The perspectives of research for enhancing actives safety based on advanced control technology[J] .Vehicle System Dynamics,2007,45(5):413-431.
[2]Federal Motor Vehicle Safety Administration.Electronic stability control,No. 126[R].Washington, DC: National Highway Traffic Safety Administration,2006.
[3]BUCKHOLTZ K R. Use of fuzzy logic in wheel slip assignment-Part 1: yaw rate control with side slip angle limitation[J]. SAE,2002(1):1220-1226.
[4]TOSHIHIRO H, OSAMU N, HIROMISTR K.Model-following sliding mode control for active four-wheel steering vehicle[J]. JSAE,2004,25(4):305-313.
[5]MOTOKI S, MASAO N. Yaw-moment control of electric for improving handling and stability[J]. JSAE Review,2001,22:473-480.
[6]ANTON T, RAINER E, KLAUS L, et al. VDC System Development and perspective[J]. SAE Paper,NO.980235.
[7]郑银环,董森,赵燕.车辆道路耦合振动建模及仿真分析[J].武汉理工大学学报:交通科学与工程版,2015,39(2):325-328.
[8]王家辉.汽车ESP系统半动态测试台架开发[D].上海:上海交通大学,2004.
[9]裴晓飞,刘昭度.车辆纵向动力学集成控制系统研究[J].汽车工程,2012(2):55-58.
[10]郭孔辉,丁海涛.轮胎附着极限下差动制动对汽车横摆力矩的影响[J].汽车工程,2002(2):122-125.
[11]李幼德,刘巍,李静,等.汽车稳定性控制系统硬件在环仿真[J].吉林大学学报:工学版,2007,37(4):89-92.
Co-simulation of Steering Stability Control Tragedy on Vehicle
LI ShengqinYANG Qing
(TrafficCollege,NortheastForestUniversity,Harbin150040,China)
Abstract:In this paper, the main research was about the control strategy on vehicle stability during the steering process. A vehicle system model was established in ADAMS/Car and confirmed the correctness.According to the main reason for the instability of the vehicle, a controller was designed to control the braking force of each wheel in the MATLAB/Simulink, the co-simulation model of the vehicle was established, used the fuzzy control strategy. accordingto some conditions like double lane change, the sine-delay and snake-like on different road adhesion coefficient,somevirtual testsof the vehicle modelwere proposed, to analyze the change of yaw rate and vehicle sideslip within or without control. Results showed that the vehicle could keep good agreement of traveling path if it was under the control, either the yaw rate and sideslip angle. It guaranteed safety of the vehicle, and the effectiveness of the control strategy was confirmed.
Key words:steering stability; ADAMS/Car; fuzzy control; co-simulation
收稿日期:2015-11-21
doi:10.3963/j.issn.2095-3844.2016.01.013
中图法分类号:U461
