捷联导引头线性区策略研究*
2016-03-02黄叙磊郗俊杰黎海青
黄叙磊,郗俊杰,黎海青,王 根
(中国兵器工业第203研究所,西安 710065)
捷联导引头线性区策略研究*
黄叙磊,郗俊杰,黎海青,王 根
(中国兵器工业第203研究所,西安 710065)
文中介绍了捷联激光导引头工作原理,提出了旋转弹捷联激光导引头线性区判断的问题,并提出了几种线性区判定策略,同时分别对各策略进行了详细分析,确定了一种较优的策略。研究了导引头工作在线性区外时的控制方案,此方案对我国低成本捷联制导弹药装备发展具有一定的借鉴意义。
捷联导引头;线性区;控制
0 引言
捷联寻的制导通常包括全捷联和半捷联两种方式。全捷联方式彻底取消了机械回转机构,优点是体积、成本均大幅降低,可靠性提高,跟踪速度和跟踪精度不受机械限制和摩擦力矩影响,缺点是探测器需要较大的瞬时视场,同时视线角速率提取十分困难。根据寻的制导方式不同,目前广泛应用的激光半主动捷联寻的制导、捷联成像寻的制导和捷联雷达寻的制导等均可实现全捷联制导。下面线性区策略研究以激光捷联导引头为例。
1 捷联激光导引头线性区原理
相对于平台激光导引头来说,捷联激光导引头没有内外区之分,其只有线性区与非线性区的区别。在不考虑导引头死区、线性度等对输出的影响下,其输出曲线如图1所示。
从图1可以看出图中虚线所画部分内导引头输出的曲线呈线性变化,虚线外的部分由于探测器的硬件因素,因此无法满足线性化的要求,所以必须对导引头输出信号进行限幅。
激光捷联导引头输出的两路角偏差信号uΔy、uΔz,其能够输出的所有值的集合构成了线性区。

图1 导引头输出曲线

图2 导引头限幅后的输出曲线
如图3所示虚线区域内为线性区,实线部分内为导引头的视场,虚实线之间为导引头非线性区(即限幅区)。由图3可以看出导引头其线性区比较小。当飞行过程中由方案控制段转入导引段时,即导引头刚捕获目标时,导引头输出的角偏差信号一般处于非线性区,所以必须减少导引头处于非线性区工作时间,尽快进入线性区。

图3 导引头线性区
2 捷联激光导引头非线性区控制策略
通过控制系统作用,当捷联导引头在非线性区时,通过偏置追踪末制导方式控制指令使弹轴快速向弹目线方向转动,使捷联导引头尽快工作在线性区;线性区内采用导引控制,非线性区采用偏置追踪末制导方式控制,线性区内外控制方式自动切换。
具体的指令设计为:
式中:Uy、Uz分别为俯仰、偏航通道导引头输出幅值;U1、U2分别为俯仰、偏航控制指令;Tdy为导引头捕获目标时刻;c为导引头线性区系数;k1、k2为俯仰、偏航通道控制器系数,如为轴对称弹则k1=k2。
弹体在飞行过程中,当导引头捕获目标且进入控制系统设计的导引开始时间时刻Tb,开始判断导引头偏差信号,当连续N帧信号均小于a°即进入线性区,按导引方案进行制导,当连续N帧信号均大于a°时即进入线性区外时,再次按偏置追踪末制导方式控制,直至拉入线性区内,且两种制导方式在初次切换过程中设计过渡时间,保证切换过程指令平滑性,使弹体姿态变化平缓。
式中:Td为弹体时间常数;Tz为激光编码照射周期。
图4为某弹飞行数据,在Tdy=5.296 s时刻开始由方案控制段转入制导段,刚进入制导段时,导引头输出的角偏差信号处于非线性区(B=0,B为线性区标志量值),此时按偏置追踪末制导方式进行控制;当7.508 s时,导引头输出的角偏差信号处于线性区(B=1),此时按导引方案进行制导;当9.432 s时,导引头输出的角偏差信号处于非线性区(B=2),此时按偏置追踪末制导方式进行控制,且两种末制导方式不再过渡;从图4看出,此发弹在飞行过程中进行了6次线性区边缘的自动切换,直至最终命中目标,表明此捷联导引头线性区边缘控制方法可行。

图4 线性区边缘控制方式自动切换标志量
3 旋转弹捷联导引头线性区控制问题的提出
通过数据可以看出上述控制策略对倾斜稳定弹是可行的,但对于旋转弹则出现了新的问题。
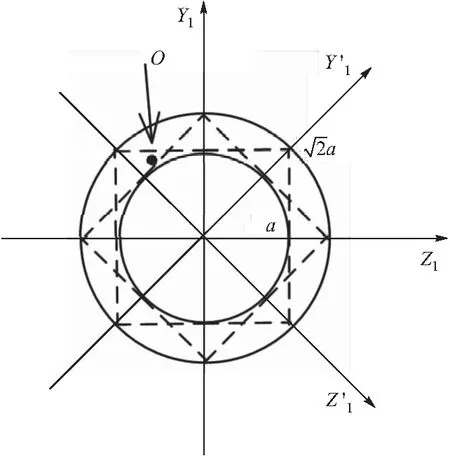
图5 旋转弹导引头线性区示意图
4 旋转弹捷联导引头线性区控制策略
针对旋转弹在线性区边缘的现象研究出以下策略:
将旋转弹在弹体系下测的角误差信号投影到准弹体坐标系,对于超出输出轴线性区的角误差信号进行限幅,Y2、Z2轴输出的信号分别为Uy、Uz。其计算公式为:
(3)
式中r为弹体滚转角。

图6 准弹体系下导引头线性区示意图




策略5:半径为a的圆。

策略6:改进的半径为a的圆。
5 仿真结果研究
为了验证以上6种策略的效果,对其进行弹道仿真。仿真条件选取某型导弹远射程典型弹道,该型导弹为旋转弹使用捷联激光导引头,其飞行的弹道特点为末制导段其导引头输出处于线性区边缘。
仿真结果见表1。

表1 旋转弹捷联激光导引头线性区控制策略对比结果
为了进一步验证各策略方法在实际条件下的适用情况,对该导弹增加侧向10 m/s的恒值常风,仿真结果如表2。
从表1和表2可以看出,策略4和6在无风条件下出线性区次数和脱靶量无差别,相比策略5脱靶量还要略高。但在常风干扰作用下,导引头侧向输出值变大,导致策略4出线性区次数及脱靶量直接上升,综合考虑策略6方法较其余方法更优。

表2 旋转弹捷联导引头线性区控制策略对比结果(恒风)
6 结论
文中通过介绍捷联激光导引头工作原理引出了旋转弹捷联激光导引头线性区判断的问题,在阐述问题的同时提出了线性区外控制方案及几种线性区判定策略,并分别对各策略进行了详细分析,最终确定了一种较优的策略。
[1] 邓仁亮. 光学制导技术 [M]. 北京: 国防工业出版社, 1992.
[2] 林喆. 捷联成像寻的系统制导信息处理方法研究 [D]. 哈尔滨: 哈尔滨工业大学, 2007.
[3] 李璟璟. 捷联成像导引头视线角速率估计方法研究 [D]. 哈尔滨: 哈尔滨工业大学, 2008.
[4] 梅林林, 李擎, 范军芳. 基于捷联导引头的比例导引制导律设计 [J]. 系统仿真学报, 2011, 23(增刊): 200-203.
[5] 张跃, 储海荣. 捷联式光学导引头特性与多维度最优制导律 [J]. 红外与激光工程, 2013, 42(11): 2967-2973.
Study on Strategy of Linear Region of Strapdown Seeker
HUANG Xulei,XI Junjie,LI Haiqing,WANG Gen
(No.203 Research Institute of China Ordnance Industries, Xi’an 710065, China)
In this paper, the working principle of strapdown laser seeker was introduced. The problem of judging linear region of strapdown laser seeker was proposed. Several linear region decision strategies were proposed, and the strategies of each strategy were analyzed in detail. A better strategy was determined. The control scheme for seeker working out of the linear was studied. This scheme has certain reference significance for development of low cost strapdown guidance ammunition equipment in our country.
strapdown seeker; linear region; control
2016-02-26
黄叙磊(1985-),男,陕西西安人,工程师,硕士,研究方向:导弹制导控制。
TJ765.339
A
