基于边缘检测和色彩空间的混合车牌定位算法
2016-02-26王涛赵磊
王涛 赵磊

【摘 要】随着计算机性能的提高,以及大数据的应用,智能车牌识别系统逐渐得到了广泛的应用。从技术组成看,智能车牌识别系统主要包括三个部分,分别是:车牌定位、字符分割以及字符识别三个部分。其中,车牌定位的输出作为后续两个部分的输入,车牌定位部分的定位精度直接影响了后续处理的结果。因此,车牌定位分系统在整个车牌识别系统中占有重要地位。为了提高车牌定位的精度,本文提出了一种基于边缘检测和号牌色彩信息的混合定位算法,通过实验表明,该算法可以很好地适应小型车号牌的使用环境,具有良好的抗噪声能力。
【关键词】车牌定位;边缘检测;色彩空间
0 概述
由摄像头捕捉的汽车图像是彩色图像,其中包含有大量的色彩信息以及丰富的几何信息。而车牌识别算法的主要工作就是利用图像中已有的颜色信息、车辆的几何信息和车牌的几何信息,使用数字图像处理的方法来提取车牌的位置。
颜色是人的视觉系统对光谱中可见区域的感知效果,为了准确地描述颜色,必须引入色彩空间的概念。正如几何上用坐标空间来描述坐标集合,色彩空间用数学方式来描述颜色集合。而在车牌识别过程用到的主要图像处理算法是边缘检测算法。
1 色彩空间
1.1 RGB色彩空间
RGB色彩模型一种加性色彩模型(additive color model),通过将红(Red)、绿(Green)和蓝色(Blue)以不同的方式混合在一起,来获得多种颜色[1]。RGB色彩模型的名称即来源于最主要的三种混合色:红色、绿色以及蓝色。而基于RGB色彩模型的颜色空间即为RGB色彩空间。通过将R、G和B添加在一起(即所有光线反射回眼睛)可产生白色[2]。加性色彩空间主要应用在电子显示和照明领域,如计算机的显示屏、电视屏幕以及照明灯。以计算机显示器为例,绿色、红色以及蓝色的液晶由于电压不同而产生不同的透光率,从而透过对应的光线。光谱上可视区域的大多数色彩都可以通过RGB的加性色彩空间调和三原色的比例和强度来实现。若三原色分别重合则可以生成三原色对应的补色:青色、洋红及黄色。
1.2 CMYK色彩空间
印刷四分色模式是彩色印刷时采用的一种套色模式,利用色料的三原色混色原理,加上黑色油墨,共计四种颜色混合叠加,形成所谓“全彩印刷”。四种标准颜色是:青色(Cyan,C)、品红色(Magenta,M)、黄色(Yellow,Y)以及黑色(blacK,K)。CMYK色彩空间是一种减性色彩空间,常用于印刷行业。相较于加性色彩空间,减性色彩空间的白色是印刷底料的本色,没有任何颜色,而白色则是由所有基色的混合产生。同时为了节约墨水的开支以及获得更深的暗色调,黑色直接由黑色墨水获得,而不是通过混合平红色、黄色和青色获得[3-4]。
1.3 YUV
YUV主要用于优化彩色视频信号的传输,使其向后相容老式黑白电视。与RGB视频信号传输相比,它最大的优点在于只需占用极少的频宽(RGB要求三个独立的视频信号同时传输)。其中“Y”表示明亮度(Luminance或Luma),也就是灰阶值;而“U”和“V”表示的则是色度(Chrominance或Chroma),作用是描述影像色彩及饱和度,用于指定像素的颜色。
色度信号U、V与亮度信号Y的分离是YUV色彩空间的重要性之所在。如果只有Y信号分量而没有U、V分量,那么这样表示的图像就是黑白灰度图像。彩色的电视信号正因为采用了YUV色彩空间才解决其与黑白电视机的兼容问题,使黑白电视机也能接收彩色电视信号[5]。
1.4 HSV
HSV是一种使用圆柱坐标来表示色彩的色彩空间,是一种六角锥体模型。其通过重排RGB色彩空间的几何描述以使得HSV色彩空间更加符合人眼的直觉和更容易被人眼感知到[6]。该色彩空间在20世纪80年代提出,现在主要用于拾色器、图像编辑软件、图像分析以及计算机视觉领域。HSV色彩空间的三个字母分别代表:
色调(Hue,H):以角度计算,其取值范围为在0°~360°之间,从红色开始按逆时针方向计算,0°位置为红色,120°位置为绿色,240°位置为蓝色。它们的补色位于60°黄色,180°青色,以及300°品红;
饱和度(Saturation,S):取值范围为0.0~1.0,值越大,颜色越饱和;
亮度(Value,V):取值范围在0(黑色)~255(白色),有时亮度也会称为Brightness。与RGB和CMYK等色彩空间面向于硬件不同的是,HSV色彩空间面向的是用户,更直观的说,面向的是人的眼睛。
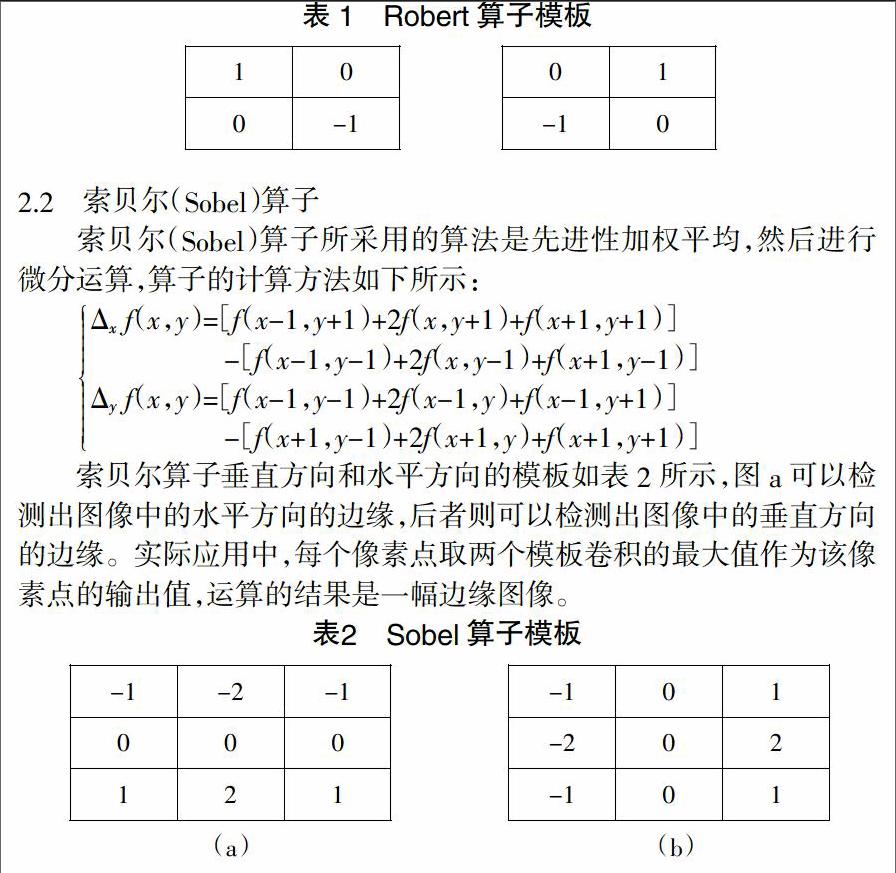
2 边缘检测算子
图像中灰度值或色彩急剧变化之处,即为物体的边缘,在灰度值变化比较剧烈之处进行微分运算,就可以得出区别于其他处的较大值,因此,可以利用各种微分运算进行边缘检测。边缘检测算子就是通过检查每个像素点的邻域并对其灰度变化进行量化来达到边界提取的目的,而且大部分的检测算子还可以确定边界变化的方向[7]。
2.1 罗伯特(Robert)边缘算子
3 混和车牌定位算法的提出
根据《中华人民共和国公共安全行业标准GA36-2007中华人民共和国机动车号牌》规定,我国大型汽车号牌以及挂车号牌长度为440mm,前号牌高度为140mm,后号牌的高度为220mm,颜色为黄底黑字黑框线;小型汽车号牌的外廓尺寸前后一致,均为高度140mm,宽度440mm,颜色为蓝底白字白框线。根据使用场景来看,上述两种类型在普通的汽修厂当中是比较常见的车型,因而实现对相应的号牌号码的识别是首要的任务。由此,为了解决该问题,本文提出来一种根据车辆号牌颜色及边缘检测的混合方式来定位车辆号牌在图像中位置的算法。该算法的主要过程分为两步:
(1)根据号牌的几何特征,利用边缘检测的方式去除噪声,粗略定位车牌;
(2)根据号牌的颜色特征,利用色彩空间的方法去除色彩噪声;
(3)将上述两步的输出图片进行与运算得到输出结果。
下面分别详细说明上述3个步骤的内容。
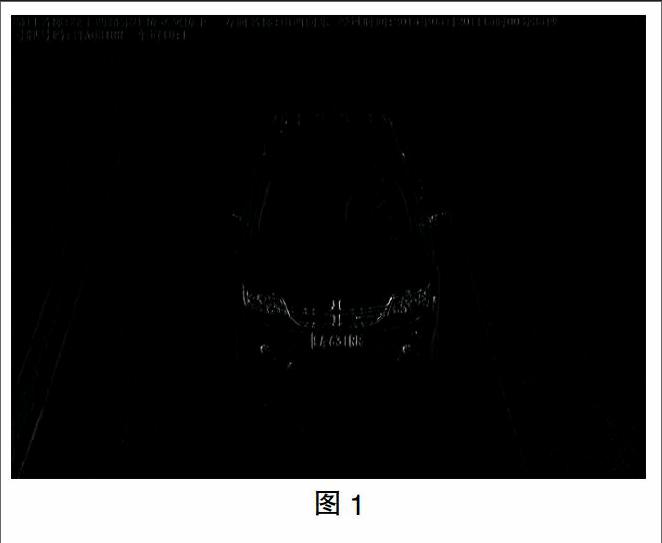
3.1 边缘检测去除噪声
众所周知的是,国内的车牌都是矩形的,而在安放车牌的位置的周围存在着大量的非直线形的曲线噪声,因此利用一阶的边缘嵴检测算子即可去除类似的曲线噪声。同时,仔细观察车辆号牌的几何特征,我们会发现:车辆号牌上有大量水平方向的干扰,比如车辆后备箱盖外缘、引擎盖外缘以及悬挂车牌位置的水平方向干扰等。因此,可以利用垂直方向的索贝尔算子进行垂直方向的边缘检测以去除水平方向的干扰。如下图1所示,是使用垂直方向的索贝尔算子进行卷积运算后的车辆号牌图像:
3.2 利用色彩特征去除噪声
根据前述,本文所针对的应用场景中会出现的车辆号牌主要是小型车的蓝底白字车牌以及大型车的黄底黑字车牌。在HSV的色彩空间中,蓝色在色调(Hue)空间的角度为240°,而黄色的角度为60°,因此将汽车好牌的图像由RGB色彩空间转换至HSV空间后,可以设定两个角度分别为240°和60°,即可从空域当中提取出蓝色和黄色的车牌位置。如果光照强度过大,比如白炽灯直射或者阳光晴好的正午,蓝色会有向青色便宜的趋势,所以为了能够对强光及弱光环境有一定的适应能力,可以分别将蓝色和黄色的色调分别留有10~20°的裕度,即蓝色的色调范围为230~250°,黄色的色调范围为50~70°,实验结果如下图2所示:
3.3 图片与运算
经过步骤1和2之后,分别到了边缘检测后和基于色彩空间的降噪后,产生了两幅车牌候选区域的图像。为了进一步去除噪声,提高车牌的定位精度,算法的最后一步进行图像的与运算:将步骤1和步骤2产生的图像进行与运算以提高车辆号牌的定位精度。实验结果如下图3所示:
4 结论及展望
通过上述的算法作用于实验样本中,最终得到的实验结果为:在100张图片中,有96张图片成功地定位到车辆号牌,其中有7幅图像中含有两幅号牌,结果这7张图像中的14幅号牌全部成功地定位。但是,需要注意的是该算法的成功率是基于蓝底白字号牌和黄底黑字号牌,适用范围比较有限,所以在以后的改进当中需要进一步提高该算法的使用范围。
【参考文献】
[1]Poynton, Charles A. Digital Video and HDTV: Algorithms and Interfaces[M]. Morgan Kaufmann, 2003.
[2]Hunt, R. W. G. The Reproduction of Colour (6th ed.)[M].Chichester UK: Wiley IS&T Series in Imaging Science and Technology, 2004.
[3]Galer, Mark; Horvat, Les(2003).Digital Imaging: Essential Skills[J].Focal Press. p.74,2003.
[4]Jennings, Simon(2003). Artists Color Manual: The Complete Guide to Working with Color[J].Chronicle Books LLC. p. 21, 2003.
[5]邵丹,韩家伟.YUV与RGB之间的转换[J].长春大学学报, 2004,Vol.14.
[6]李薇,李德仁.基于HSV色彩空间的MODIS云检测算法研究[J].中国图象图形学报, 2011, Vol.16.
[7]张立.云图的台风云系分割与特征提取研究[D].广州:广东工业大学,2009.
[责任编辑:王楠]
