基于SPCE061A的声控汽车的设计与实现
2016-02-24彭玲广东科技学院广东东莞523083
彭玲(广东科技学院 广东 东莞 523083)
基于SPCE061A的声控汽车的设计与实现
彭玲
(广东科技学院 广东 东莞 523083)
本文利用语音识别技术设计了声控小汽车系统,该系统能利用凌阳SPCE061A单片机把特定的声音模拟信号转化为控制电机的数字信号,从而使小汽车运动起来。
SPCE061A;语音识别;驱动;电机
1.引言
20世纪20年代,语音识别技术就开始得到研究[1]。随后,各类语音识别系统相继诞生,语音识别技术也逐渐得到完善[2]。最近几年,语音识别技术作为一门相对成熟且与人联系密切的技术,被广泛应用于各行各业中,本课题研究的声控小汽车,是希望语音识别技术能运用到汽车中,让汽车变得更加智能化。本课题研究设计的声控小汽车是对语音识别功能运用到汽车控制上的初步探讨和简单设计,设计出小汽车的整体模型,实现声音控制小汽车行驶。
2.总体方案设计
声控小汽车采用了凌阳SPCE061A作为整个小汽车系统的数据处理中心,该单片机具有语音识别和语音播放的功能[3],主要负责声音指令获取和识别的工作,声音信号从MIC麦克风处传入,经过一系列的语音处理步骤,将模拟信号转化为控制电机的数字信号,并把处理后的数据通过I/O口输出。该设计的基本架构如图1所示。

图1 声控小汽车总体架构图
3.硬件设计
声控小汽车在硬件层上的设计分为语音识别层设计、驱动层设计和车体设计三部分。语音识别层设计由SPCE061A单片机构成,主要负者将接收的声音信号转换为数字信号,并通过自身强大的计算能力和较多的I/O接口把处理完的信息传递给驱动部分。驱动部分的构成有驱动板和电机,驱动板的作用是控制小汽车的工作方式,分别有前进、后退、左转和右转四种方式。选用直流型电机负者驱动小汽车,降低了小汽车控制的难度。车体部分采用了较为实用性的托盘式三轮车,这样做可以直接将前两个部分的硬件固定在托盘上,简化了整体硬件设计的难度。
4.软件设计
声控小汽车的软件设计主要包括训练子程序、识别子程序和驱动控制子程序。训练的目的是为了获取声音模板,这些模板会被存储到模板库中。到了识别阶段,最新获取到的模板会和之前训练的模板进行匹配,最接近的一组将作为识别结果输出对应的信息,这些信息将会通过I/O口输出到驱动模块中。控制子程序的功能是让电机正向转动或反向转动,从而改变小汽车的运动状态和方向。具体流程如图2所示。
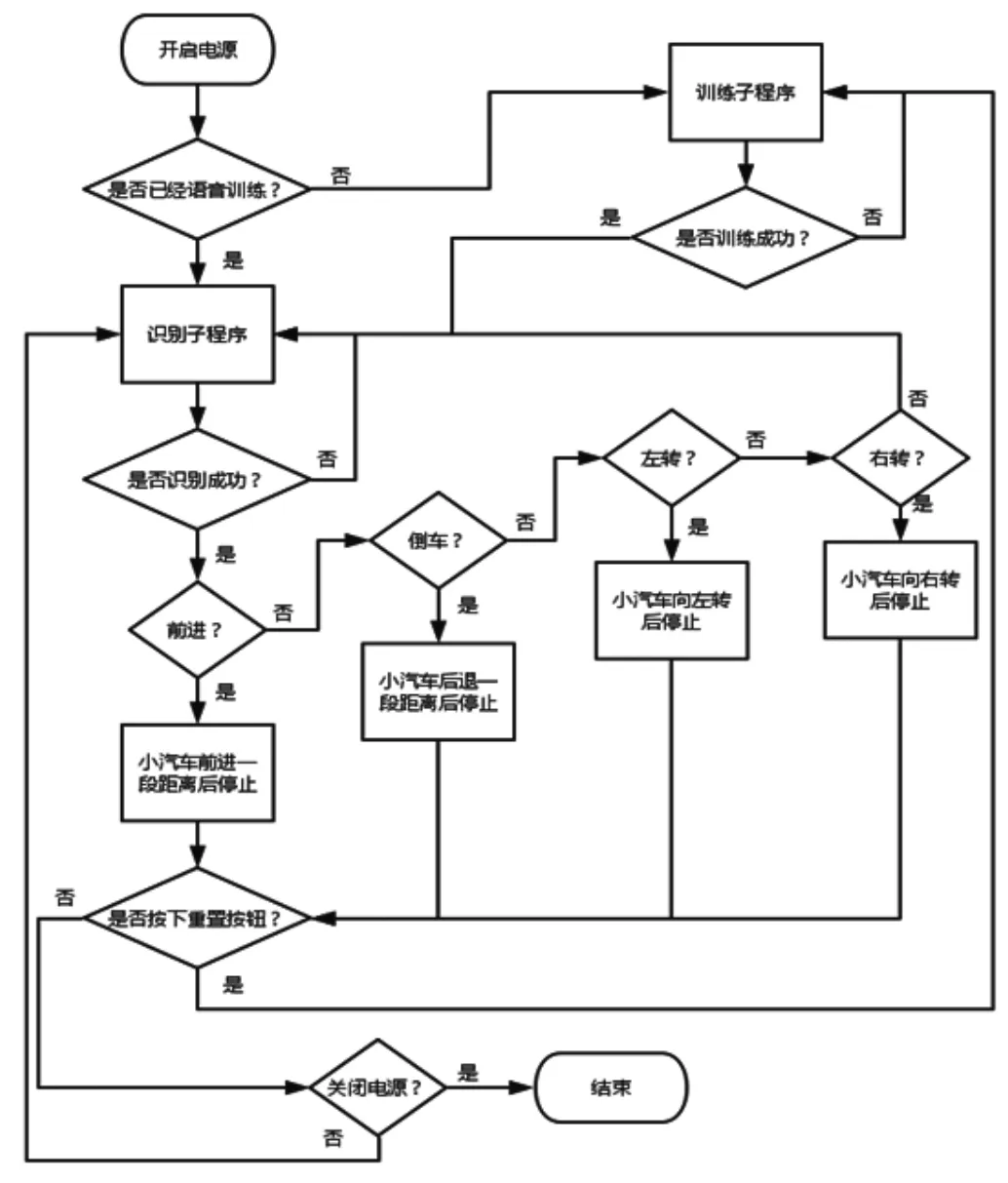
图2 声控小汽车语音训练和识别的流程图
5.测试
首先将声控小汽车的硬件连接,包括SPCE061A单片机与电源的连接、SPCE061A单片机与驱动板的连接、SPCE061A单片机与喇叭的连接、驱动板与电机的连接四个部分,连接后的实物图如图3所示。然后按照代码设计的顺序,根据提示音对声控小汽车进行训练,训练顺序为前进、倒车、左转、右转四个指令。每个指令会训练两次,如果每个训练都成功,车上的喇叭会播放训练成功的提示音。等成功完成训练环节,小汽车就可以开始语音识别环节了。声控小汽车在接收到“前进”指令时,会往前移动一段距离;声控小汽车在接收到“倒车”指令时,会向后移动一段距离;声控小汽车在接收到“左转”指令时,会向左前方移动;声控小汽车在接收到“右转”指令时,会向右前方行驶。
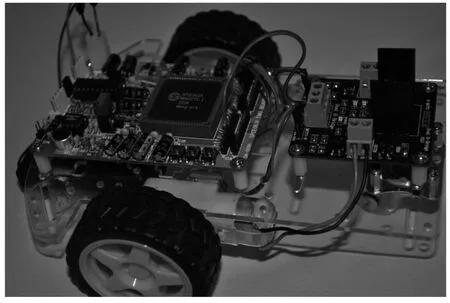
图3 声控小汽车连线后的实物图
6.总结
本设计的声控小汽车经过多次测试,基本达到了预期目标,小汽车能实现前进、后退、左转、右转的功能,同时,小汽车的语音识别功能运行比较稳定,不会出现经常不识别或识别错误的现象,当然也存在着许多不足的地方,比如在功能设计方面较为单一。在后期的维护中,会适当地增加一些功能,比如增加小汽车蔽障功能,采用PWM波控制小汽车驱动,进而控制电机的转速,完善声控小汽车的设计。
[1]陈磊.带噪环境下的汉语连续语音识别研究[D].合肥:安徽大学,2010年.
[2]景新幸.基于DSP的语音识别系统的研究与应用[D].桂林:桂林电子科技大学,2011年.
[3]薛强强.新型导游机服务系统设计[D].太原:中北大学,2013 年.
[4]徐理英.基于语音辨识的遥控小车的设计[J].微计算机信息,2009年11期.
TP11
A
1009-5624(2016)06-0157-02
