基于PLC的井控远程台实物仿真培训系统的设计
2016-02-23张文晶张方舟马瑞民孙瑞雪
张文晶,张方舟,马瑞民,李 强,孙瑞雪
(东北石油大学 计算机与信息技术学院,黑龙江 大庆 163318)
基于PLC的井控远程台实物仿真培训系统的设计
张文晶,张方舟,马瑞民,李 强,孙瑞雪
(东北石油大学 计算机与信息技术学院,黑龙江 大庆 163318)
井控安全是石油生产最大的安全隐患,针对石油钻井井控安全操作培训的不足,提出了基于PLC的井控远程台实物仿真培训系统的设计。搭建一个井控远程台培训系统的实物仿真平台,用来对井控远程台培训系统的学习和研究。介绍了基于PLC控制器为核心开发的井控仿真培训系统的设计方法,并从PLC的工作原理和基本结构,井控远程台的操作工况,以及系统工作原理,控制系统的设计,系统流程进行了详细的论述。井控实物仿真培训系统能够实现真实操作训练和考核评分等功能。让操作者在与真实相近的环境下模拟操作常用井控设备,提高钻井井控操作标准化。
PLC;井控远程台;实物仿真;培训系统
0 引 言
20世纪40年代末,仿真随着计算机技术不断发展而逐步成为一类试验研究的新兴方法。仿真最初主要应用在航空、航天、原子反应堆等少数领域中。此后,计算机技术和信息科学的迅猛发展,为仿真技术的应用提供了关键技术和充足的物质基础[1]。
硬件实物仿真技术在火箭控制、制导导弹、控制卫星姿态等研究应用方面达到了较高水平。硬件实物仿真系统在武器型号研制中也发挥了十分重要的作用[2]。20世纪90年代,我国对虚拟现实、分布交互仿真等先进仿真技术及其应用开始进行研究,开展了更大规模的综合型系统仿真,由单个实验对象平台的性能仿真发展为实验对象平台在真实操作环境下的实时操作仿真[3]。由于科技水平的不断提高和国家实力的逐步增强,硬件实物仿真新兴技术也在取得新的突破。目前硬件实物仿真已经渗透到了国民经济的各个领域,如环境保护、经济系统、交通运输系统、生物工程、水利、化工、石油等,并在国民经济建设中起到了重要作用[4]。
钻井工程,这一工艺生产过程有复杂的操作、严格的技术要求,同时需要素质较高的钻井工作人员才能上岗操作[5]。钻井工程要求其工作人员对每一个钻井过程要有充分的认识和理解,一旦发生溢流或井涌时,操作不当就会引起一系列重大事故,如井喷、地陷等。在钻井井控操作设备中,井控远程控制台是地面防喷器的控制装置,是液动压井阀开、关动作、控制液压防喷器的专用设备,是天然气、石油钻井(或修井)过程中防止井喷失控必不可少的装备,而现有的井控仿真培训系统中没有针对井控远程控制台的实物仿真系统,所以研究用于培训操作人员的井控实物仿真系统是十分必要的[6]。井控远程控制台是井控设备操作中的枢纽设备,远程控制台达到待命工况须做各种准备工作,从而进行接下来的转换和调节工作,使井控操作得以进行下一步。更为重要的是,井控远程控制台实物操作的仿真培训是现在井控培训中的空缺,设计井控远程控制台实物仿真使得仿真培训更完整接近现场工况。虽然井控前台操作比较复杂,实地培训受到很多限制,但是随着计算机技术的发展,与虚拟前台操作相比,实物仿真操作更加逼近真实操作,让培训人员得到大量的演练、训练与考核,使操作者真实接触操作设备更能提高培训人员的技术水平,实现实物前台操作的仿真培训将会成为石油行业防井喷作业的新方向。
1 系统硬件设计
该系统硬件主要由井控远程控制台及其相关井控实物设备、传感器模块、PLC、教师控制计算机构成。井控远程控制台是该培训系统的主要操作设备,是培训人员进行培训的前台实物;传感器模块实现待检测点的数据采集和转换;PLC负责对采集的数据进行分析和处理,并根据输入值控制井控远程台的下一步操作。
1.1 PLC的基本概况
PLC(Programmable Logic Controller,可编程逻辑控制器)在1969年问世于美国,它是一种以微处理器为核心的新型、通用的自动控制装置,同时综合了计算机技术、电气控制技术、自动控制技术、通讯技术等先进的学科技术。经过40多年的发展变迁,PLC已然成为最重要、最可靠、应用环境最广泛的工业控制领域的微型计算机[7]。PLC执行内部程序的存储是由一种可以编程的存储器完成的,同时还可以执行顺序控制、逻辑运算、计数、定时和其他算术操作等面向用户的指令。PLC控制各种类型机械的生产过程是通过模拟量或数字量的输入与输出完成的[8]。它具有易于编程、使用方便、控制功能强、可靠性高以及扩展方便等优点[9]。
1.1.1 PLC的硬件组成
PLC硬件一般由五部分组成,包括中央处理器CPU、输入和输出模块、存储器、编程器和电源[10]。其中,输入模块包括开关或传感器、继电器触点和行程开关等;输出模块包括电磁装置指示灯和电动机以及其他执行装置。
可编程逻辑控制器是一种采用数字采样的控制系统,它与处理压力、温度、流量等模拟量的工业监控系统(DCS)有很大不同。它是通过中央处理单元与存储器的紧密配合,进行控制以及运算功能[11]。
1.1.2 PLC的工作原理
PLC的扫描周期采用一种快速往复巡回的方式,如图1所示。PLC每重复一次这四个阶段所有的时间就是一个扫描周期。

图1 PLC的扫描周期
PLC主要采用循环扫描的工作方式,其一个采样周期一般在10 ms到20 ms之间,同时也可以根据现场不同的被控对象的需求来选择更短的采样周期。
某些新型的可编程逻辑控制器应运而生,其扫描周期的精确度可以达到十分之一个毫秒的级别。PLC的中央处理单元是利用分时操作的方式处理各项任务,从PLC的外部输入、输出过程来看,运算速度高,可瞬时完成处理要求[12]。在PLC中的CPU每次扫描分步完成以下工作:
(1)读入数据:把实验开关量的各种输入信号和数据参数分别录入在数据寄存器和输入寄存器中。
(2)解释用户程序:产生对应的控制信号控制有关的电路在PLC内部,同时可进行存取数据、传送数据以及处理数据的工作,之后参照运算结果将各个相关寄存器的内容更新[13]。
(3)输出数据:输出模块将接收到由输出寄存器存储的内容来驱动和控制外部设备。
若干条不同指令组成了PLC的用户程序,这些指令在储存器中是按照步进序列号顺序排列储存。当程序没有使用跳转指令时,CPU执行的第一条指令将会从程序的第一条指令开始,按照顺序依次来执行用户程序,直到整个程序结束。然后,程序返回至开始的第一条指令,同时重新开始扫描整个程序。这样不断重复上述扫描就是PLC的循环过程,从而完成对控制对象的实时操控任务[14]。一套PLC系统硬件部分还包括许多模块。除了一般模拟量和数字量输入输出模块外,对于I/O模板来说,目前还发展出具有特殊功能系列的I/O模板,如高速计数模板应用在机械加工领域和运动控制领域、PID模板应用在控制系统中反馈控制使用,以及中断输入处理模板、单轴或多轴位置控制模板等。这些特殊模板一般由PLC中的CPU来执行分析和处理,自身仅提供硬件支持环境的模板的通讯接口。
1.1.3 PLC的控制系统
基于PLC的井控远程控制台实物仿真培训系统中,培训人员的操作动作信号的采集、传输与PLC控制系统设计是该仿真培训系统的核心部分,因此提供的硬件必须具有较高的扩展性、可靠性、可维护性以及良好的人机接口。其硬件部分主要有以下部分:PLC的CPU及其功能模块,信号传感器以及信号传输部分,结构如图2所示。
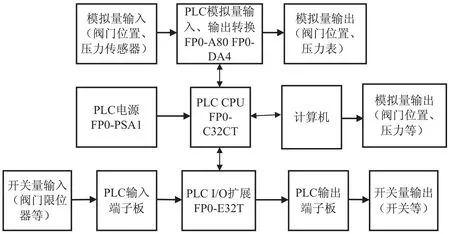
图2 控制系统结构
1.2 井控远程台的设计
1.2.1 井控远程控制台的组成
目前,国内现场使用的控制装置,它们的工作原理与结构组成以及操作要领基本相同。该控制装置可以控制一台环形防喷器、一台双闸板防喷器、一台单闸板防喷器、一个液动阀、一个备用控制线路,共计可控制6个对象。
该装置的蓄能器组是由8个蓄能器组成,单瓶公称容器801,因此蓄能器公称总容积为6 401。井口防喷器开关动作所需的液压油由蓄能器提供,蓄能器所储存的液压油则由电泵与气泵供应与补充[15]。
远程控制台上除气源压力表外还装有3个油压表,即蓄能器压力表、环形防喷器供油压力表、闸板防喷器供油压力表。为使司钻控制台上的操作者能随时了解远程控制台上的油压变化情况,蓄能器装置上安装有3个气动压力变送器。气动压力变送器的作用是将油压的变化转为气压讯号。气管线将气压讯号传输至司钻控制台上的二次仪表,由二次仪表显示油压值。
1.2.2 井控远程控制台工作的原理
气控液型控制装置的工作过程分为:
(1)液压能源的制备与储存;
(2)控制装置的液控流程—压力油的调节与流向的控制;
(3)气压遥控:压缩空气经分水滤气器、油雾器后,经气源总阀输送至各空气换向阀,控制储能器装置上二位气缸动作,推动相应的换向阀手柄,间接控制防喷器开关。
1.2.3 井控远程控制台的改造
为实现井控远程台设备操作的流程,满足高频次的培训需要,同时针对设备带压状态下的操作磨损,采用非真实液压油进行调节与控制。根据以上需求对井控远程控制台进行设计改造。该仿真培训操作系统设计是对原有井控设备远程台进行改造,主要是对远程台上各功能仪表和各关键阀门进行改造。
首先,将现有由气动压力变送器作用使油压转变为气压讯号的蓄能器压力表、管汇压力表等压力信号仪表改为电信号仪表,使连续的气动压力信号转换为离散的电信号。其次,在各关键阀门处安装相应传感器等设备,实时采集操作者操作动作、视角与设备状况信号。同时,传感器采集的信号通过PLC控制器进行数据分析整理后,反馈至音效仿真单元与教师控制计算机上。最终,控制计算机根据操作者动作行为进行过程记录、结果评价、语音提示,以及设备内部动作三维动画播放等操作。
其中,改造的设备分三类:用于信号采集的手动旋转阀门手动开关等设备,用于数据输出和显示的各功能仪表设备,用于操作的远程控制台上的各种阀门设备。这些都是该系统主要设计的硬件设备。
1.3 传感器的选型和设计
当今信息技术以飞一般的速度在大时代的浪潮中前行,这与传感器所发挥的作用是息息相关的,其在数据采集和处理过程中所起到的作用是无可取代的,更是获取信息的有效手段。传感器其实是一种测量器件(或者装置),它为系统提供一定的需求,采用被测量转换为其他的物理量的方法。尽管不同的传感器其功能、组成、工作原理以及应用范畴都存在差异,但是都是由转换原件、测量电路和敏感元件三部分构成。
在钻井井控过程中,依靠不同的传感器对待远程控制台上的不同信息进行检测。首先,检测蓄能器截止阀操作阀门的起始位置和手动操作旋转的终止位置,采用加装编码器用于检测阀门旋转度,模拟操作者对阀门的准确控制动作过程,使旋转式阀门在操作过程中能够使操作者的操作状态达到真实的效果,可方便地转换为数字量传输给PLC;其次,检测三位四通换向阀、旁通阀、储能器截止阀等阀门开关状态,采用加装磁力传感器的方法,用于检测手动阀门位置,模拟操作者控制动作。此传感器的使用是最为巧妙的方案,并不是磁力传感器本身有什么特殊的长处,而是磁力传感器与旁通阀以及多个三位四通转换阀的巧妙结合,利用了磁力传感器的特点和三位四通转换阀以及旁通阀的工作原理和结构特征,选择将两者结合在一起能够逼真地实现实物设备的仿真培训;再次,采用加装红外传感器的方法用于模拟操作者视角变化,便于教师的考核与评分。选择了SHARP公司的红外测距传感器GP2Y0A02YK0F系列产品,其可测距离20~150 cm,电源电压4.5~5.5 V[16]。然后,(基于PLC控制的气密液压检测系统的设计与实现)远程控制台正常运行过程中真实的内部操作都是由油压和气动压力完成的,因此,压力信号采集是整个系统的核心,压力传感器的精度是关系到整个系统检测的重要因素。采用精度较高的压力传感器以用于提高系统的检测精度,减小误差,得到更精确的检测结果。最后,将检测到的电信号传输到PLC控制器和计算机上进行分析和计算[17]。
基于PLC井控远程台实物仿真培训系统的硬件构成如图3所示。
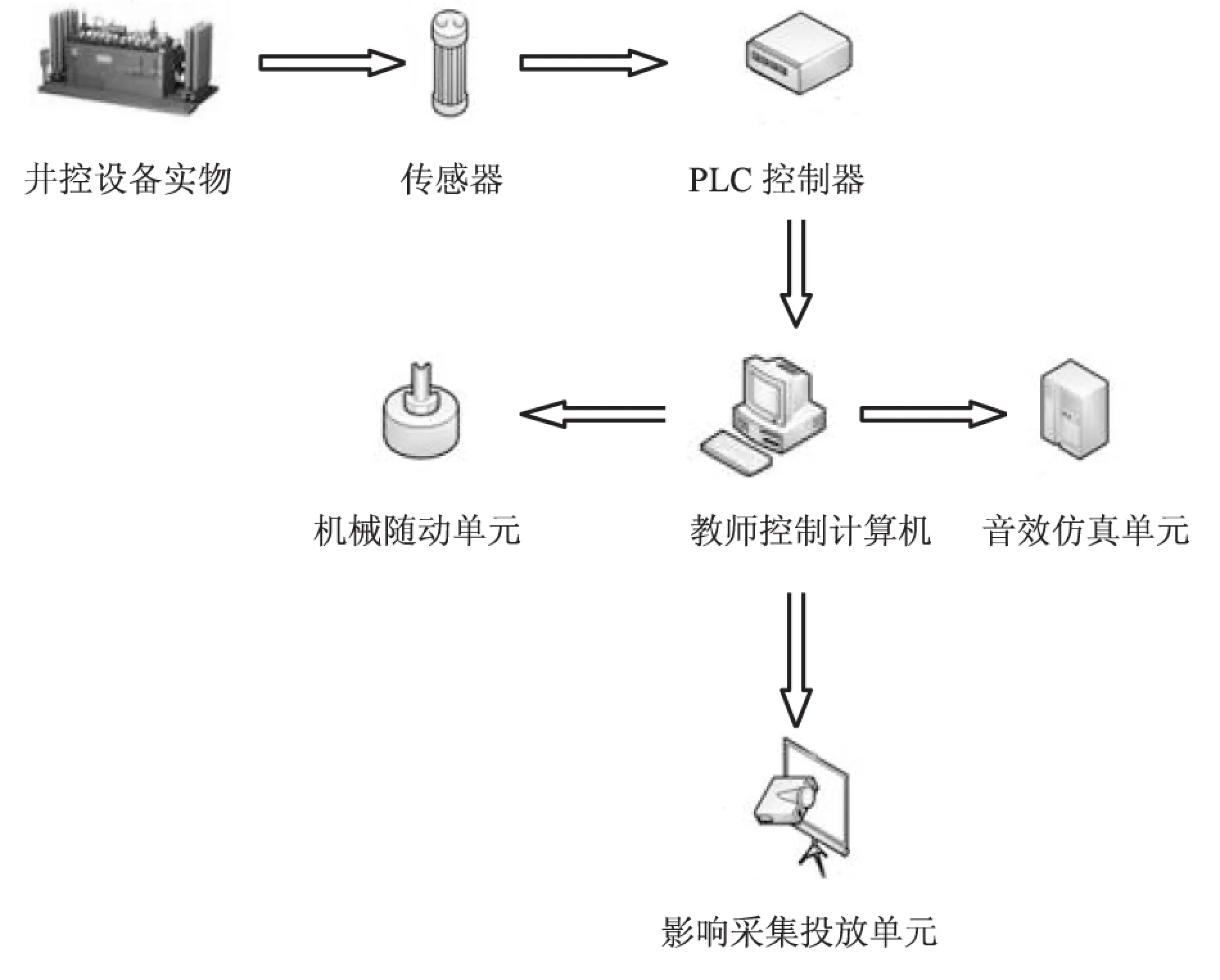
图3 系统硬件构成
2 系统总体设计
根据前文所述,系统结构组成主要由PC机、传感器、PLC、井控远程台设备四部分组成。整个设计由两部分组成,分别为上位机与下位机。上位机采用紫金桥组态软件,用于实现数据传输和数据处理。可设定和修改压力值、阀门旋转度等电信号的标准值与报警值,查询历史记录、显示历史曲线图以及分析每一次操作的分步数据,检查各监测点的信息状况,完成数据的自动记录;利用教师计算机实现现场实时数据的监测、设定数据极限值,如果釆集到的数据超出或不满足设定的范围,系统会给出提示信息。PLC是下位机的主控制器,完成信号的采集、传输、数据的整理分析,并将教师培训系统、机械随动和音效仿真系统以及重点部位影像投放系统等功能与原有功能相结合共同发挥作用,实现在实际设备上的仿真培训功能。
图4为实物仿真培训系统原理图。
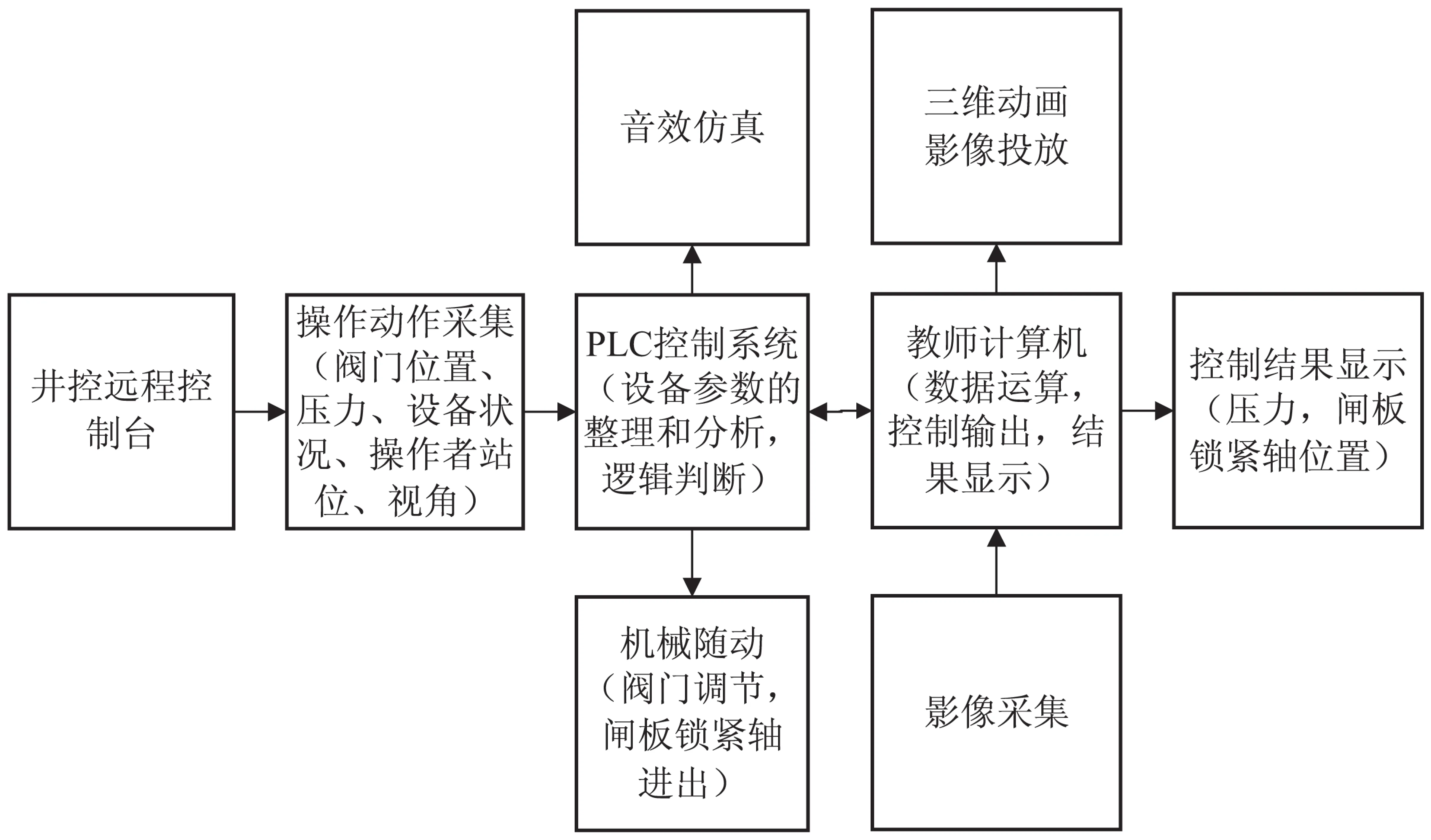
图4 实物仿真培训系统原理图
该井控远程台实物仿真培训中,主要对三个工况做出设计,它们是:在远程台操作电气泵进行压力油制备,在远程台操作三位四通换向阀进行防喷器及放喷阀开关操作,在远程台操作手动与气动减压阀进行压力调节。这三个工况在该实物仿真培训系统中的设计有相似之处,所以这里选择其中一个操作流程设计进行详细说明。
在远程台操作手动与气动减压阀进行压力调节时:
第一,由教师在教师控制计算机上分别选择“调节压力对象(手动、气手动或司控台)、操作类型(培训或考核)”等参数。
第二,操作者根据调节要求分别调节手动或气动减压阀。调节手动减压阀时,顺时针旋转手轮二次油压调高;逆时针旋转手轮二次油压调低。调节气手动减压阀时,顺时针旋转气手轮减压阀手轮二次油压调高;逆时针气手轮减压阀手轮二次油压调低。如需要在司控台进行调节时,先将三位四通气转阀(分配阀)扳向司控台,气手动减压阀由司钻控制台遥控。调节时顺时针旋转手轮二次油压调高,逆时针旋转手轮二次油压调低,二次油压最大跳跃值可允许3 MPa。
第三,在手动与气动操作阀门上均加装编码器,检测阀门旋转度,通过利用传感器采集的阀门位置检测信号传输到PLC控制器和计算机上并进行分析和计算,输出的电信号控制电压表,模拟气压、油压等变化过程,反馈给前台操作压力表显示数据,进而再根据此次的数据情况进行下面的操作。同时,教师计算机上已经记录了此次操作是否合格并进行评分。
最终,使系统实现以下需求:
(1)系统能实现远程控制台的检查与运行等内容的真实操作训练功能;
(2)系统能够在设备操作后,自动对操作过程进行考核评分;
(3)系统能够自动检测操作者视线视角变化;
(4)设备操作手感、力度、动作、效果仿真实物操作效果;
(5)控制终端人机界面良好,图形、数据处理快速有效,系统整体故障率低于5‰。
3 系统流程
首先,教师在PC机上选择参数同时开启培训或考查过程,然后学员按照其所选择的培训项目进行操作,完成在远程控制台上的井控操作,如压力油制备、软关井、调节阀门开度操作等过程,同时观察控制台上各压力表变化情况与工作状态。在进行上述操作之前,先给PLC上电,将系统初始化,完成后向PLC发送数据请求。PLC对各关键阀门的传感器执行数据釆集控制,把釆集到的数据经过数模转换后,通过逻辑运算得到控制结果和输出,将结果传给计算机或输出到被控设备,同时进行数据的存储和部分控制信息,PLC控制器检测操作者动作和视角情况,并进行声光效果的仿真。PC机依靠检测工况和PLC控制结果,利用程序设定进行分析和计算,产生阀门控制和压力信号进行输出。若操作者的操作值并未达到指定要求,系统也会进行其结果的输出目的是使操作者可以反复进行训练操作,那么,再次进行数据采集,直到所测得的压力值等在系统规定范围内为止。若不超标则经过一定延时,同样重新进行数据采集。最终获得评价结果。
系统流程如图5所示。
该实物仿真培训系统中,三个主要的工况流程有相似之处,在此只是介绍其中一种工况的流程,就可以体现出基于PLC的井控远程台实物仿真培训系统设计的优点,以及该系统能够更加接近于真实的操作,发挥实物仿真培训的重大作用。
在远程台操作手动与气动减压阀进行压力调节的流程如下:
(1)操作者打开电源,启动泵制备压力油,手动启动电动机检查电机转向,阀门位置检测传感器,检测阀门旋转度,通过利用传感器采集此次的阀门位置检测信号传输到PLC控制器和计算机上并进行分析和计算。
(2)教师计算机上在操作开始时已经设定好此次操作的标准数据,让实际数据同标准数据做差运算,利用运算结果进行判断:
①如果结果在操作允许的范围内则合格,那么就将正确的操作者的实际数据结果显示在电压表、模拟气压表或是模拟油压表上,反馈给操作人员使其及时进行压力调节,维持系统稳定的状态。
②如果结果不在操作允许的范围内则不合格,那么依然将操作者的实际数据结果显示在电压表、模拟气压表或是模拟油压表上,反馈给操作者让其进行重新的更正操作,直至教师机上的运算在可允许的范围内,达到稳定状态为止。
其中,流程内含有一个闭环控制流程,闭环控制是被控的电表、拟压力表和油压表的显示数据为输出,其以一定方式返回到作为控制的输入端,即显示给操作者,操作者根据上一次的操作结果进行再一次的操作作为输入并对输入端施加控制影响的一种控制关系,完成一次反馈循环流程,直至操作数据达到规定的范围内,即达到收敛极值,系统达到稳定。
4 结束语
文中针对当今石油钻井工业的迫切需求,并依靠现已成为主流、必备的工具,具备灵活、可扩展、多用途的实物仿真技术,提出了基于PLC的井控远程台实物仿真培训系统的研制策略。利用实物仿真技术与PLC的特点和优势,迅速建立了可交互的井控远程台实物仿真培训系统。该系统有着现场培训和虚拟的软件仿真培训无法比拟的优势,培训人员需要大量的演练、训练与考核。硬仿真操作让学员有非常逼真的临场感,使操作者真实地接触操作设备,更能够提高培训人员的技术水平。
[1] 贾连兴.仿真技术与软件[M].北京:国防工业出版社,2007.
[2] 屠 毅,肖 翔,李 楠.大型飞机起落架收放控制系统仿真[J].北京航空航天大学学报,2013,39(5):595-599.
[3] Wang L F,Tan K C,Jiang X D,et al.A flexible automatic test system for rotating-turbine machinery[J].IEEE Transactions on Automation Science and Engineering,2005,2(1):1-18.
[4] Bucci G,Ciancetta F,Fiorucci E.An automatic test system for the dynamic characterization of PEM fuel cells[C]//Proc of IMTC.[s.l.]:[s.n.],2004:674-676.
[5] 中国石化集团公司井控培训教材编写组.钻井井控设备[M].东营:中国石油大学出版社,2008.
[6] 颜廷杰.实用井控技术[M].北京:石油工业出版社,2010.
[7] 潘 勇,高俊雄,王耘波.PLC的应用和发展[J].计算机与数字工程,2007,35(2):76-78.
[8] 李国屏.谈PLC可编程控制器的原理和工业应用[J].宁波职业技术学院学报,2005,9(2):25-27.
[9] 万 丹.基于PLC的散粮装卸控制系统的应用与研究[D].广州:华南理工大学,2014.
[10] 王建农.谈电气自动化PCL的扫描技术[J].黑龙江科技信息,2012(21):75-75.
[11] 马 战.污水处理系统中自动化控制技术(PLC)的控制原理[J].科学与财富,2013(6):34-34.
[12] 陈 亮.基于PLC的电梯控制系统探讨[J].电子世界,2012(7):93-94.
[13] 庞 春.深入理解PLC的工作方式[J].数字技术与应用,2011(7):164-165.
[14] 刘美俊.西门子S7-300/400PLC应用案例解析[M].北京:电子工业出版社,2009.
[15] 《石油天然气钻井井控》编写组.石油天然气钻井井控[M].北京:石油工业出版社,2008.
[16] 王 欢.基于PLC的黑木耳生长环境监控系统的设计[D].哈尔滨:东北农业大学,2014.
[17] 袁海林.基于PLC控制的气密液压检测系统的设计与实现[D].成都:成都理工大学,2013.
Design of a Training System for Long Range of Well Control Physical Simulation Based on PLC
ZHANG Wen-jing,ZHANG Fang-zhou,MA Rui-min,LI Qiang,SUN Rui-xue
(College of Computer and Information Technology,Northeast Petroleum University,Daqing 163318,China)
Oil production well control safety is the biggest security problem.Aiming at the shortage of lack of hands-on training for oil drilling well control security,the design of physical simulation training system of well control of remote station based on PLC was proposed.Building a physical simulation platform of well control training system of remote station will be used for well control training system for the remote station to learn and study.The design method was discussed in detail for well control physical simulation training systems based on PLC controller as the core development and from the PLC work principle and the basic structure,operating conditions of remote station of well control,and the system work principle,the control system design,the flowing of system conducted a detailed introduction.Well control physical simulation training system can achieve real operation training and assessment score and other features,which let the operator apply the environment for simulation as similar as the real operating well control equipment to improve the standardization of drilling well control operations.
PLC;long range of well control;material simulation;training system
2015-05-30
2015-09-04
时间:2016-01-26
黑龙江省高等教育教学改革项目(JG2013010153)作者简介:张文晶(1990-),女,硕士研究生,研究方向为计算机系统结构;张方舟,教授,研究方向为计算机网络、计算机仿真、人工智能;马瑞民,教授,研究方向为计算机应用技术。
http://www.cnki.net/kcms/detail/61.1450.TP.20160126.1522.078.html
TP302.1
A
1673-629X(2016)02-0174-05
10.3969/j.issn.1673-629X.2016.02.039
