基于RSSI的LANDMARC室内定位算法的改进
2016-02-23周亚罗程锐涵王莎莎
周亚罗,程锐涵,王莎莎
(1.华北理工大学 电气工程学院,河北 唐山 063009; 2.华北理工大学 信息工程学院,河北 唐山 063009)
基于RSSI的LANDMARC室内定位算法的改进
周亚罗1,程锐涵2,王莎莎2
(1.华北理工大学 电气工程学院,河北 唐山 063009; 2.华北理工大学 信息工程学院,河北 唐山 063009)
LANDMARC算法;虚拟标签;最近邻区域;距离损耗模型
针对基于信号强度的LANDMARC算法存在的定位标签有限、定位精度低的问题,提出在待定位标签的近邻区域插入虚拟标签的改进方法,利用距离损耗模型确定虚拟标签的场强值。在LANDMARC算法的基础上多次插入虚拟标签来获得最小定位误差。仿真实验结果表明,改进后的定位算法在未增加硬件成本和算法速度的条件下,提高了定位精度。
随着移动互联时代的到来,以及人民生活品质的提高和服务意识的增强,使得室内定位技术的研究受到了越来越广泛的关注。基于RSSI( Received Signal Strength Indication)的LANDMARC定位算法[1],通过引入参考标签,利用阅读器读取标签的信号强度值RSSI,计算待定位标签的坐标位置。方法简单,成本低廉,环境适应能力强,定位精度比较理想。尽管如此,LANDMARC系统存在一些缺陷和不足,董君,李吉彪提出了改进的RSSI加权质心定位算法[2],用信号强度RSSI值作为加权因子,避免了传统上采用欧式距离作为加权因子带来的误差。马捷中,刘云超等提出了一种改进三角区域定位方法[3],消除了远距离标签对定位精度和定位速度的影响;陈淑敏,乔晓田等提出了基于RSSI的室内二次定位方法[4],上述方法分别从降低计算量和提高定位精度上进行了研究和改进,但如何实现在保证不增加计算量、不增加硬件成本的前提下提高定位精度,有待研究。该项研究通过仅在待定位标签的近邻区域多次引入虚拟标签,减小了定位误差,提高了定位精度。
1 LANDMARC室内定位算法
LANDMARC算法的核心是K最近邻算法,简称KNN(K-Nearest Neighbor)。LANDMARC通过引入参考标签,根据阅读器比较接收到的参考标签和待定位标签信号强度值,计算欧式距离,选取距离差值最小的K个参考标签作为其“最近邻居”,利用K个近邻标签的坐标加权计算出待定位标签的坐标位置。图1所示LANDMARC系统布局,具体定位算法如下:
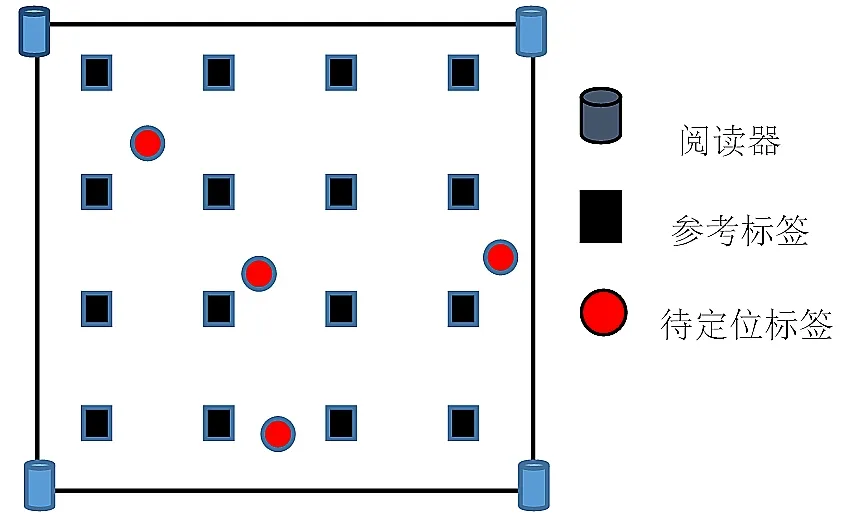
图1 LANDMARC系统布局

K个邻居中,关联度越小的参考标签的位置权重Wi越大。
(1)
K个参考标签的坐标加权计算可得出待定位标签的坐标位置。
(2)
式中:
(x,y)-待定位标签的定位坐标;
(xi,yi)-参考标签坐标;
Wi-参考标签的权值。
定位误差:
(3)
式中:
(x,y)-待定位标签的定位坐标;

2 LANDMARC室内定位算法的改进
2.1 算法改进
LANDMARC算法是一种简单有效的分类算法,但定位精度受制于参考标签的部署密度。从硬件成本、定位速度、定位精度等多方面考虑,本文提出在LANDMARC算法的基础上多次迭代在近邻区域引入虚拟参考标签[5]。
首先利用LANDMARC算法选取待定位标签的K个近邻标签,K个标签组成的最小矩形区域为插入虚拟标签的区域,即近邻区域。如图2所示:
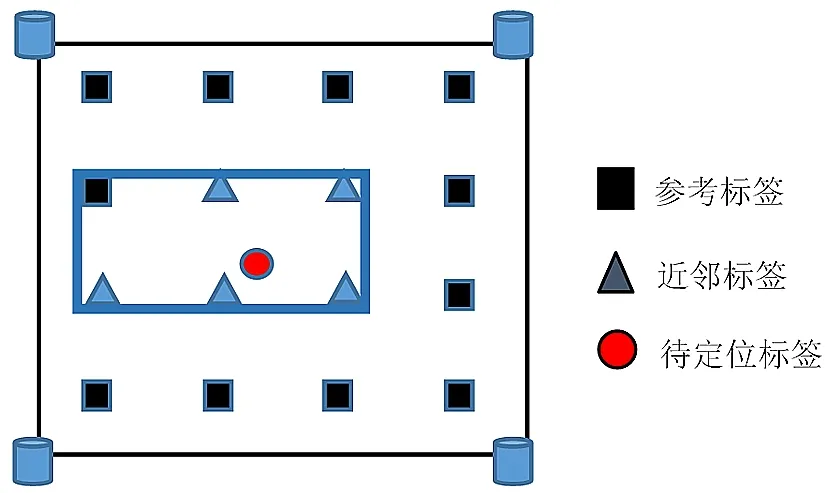
图2 虚拟标签插入区域


图3 虚拟标签分布图
K近邻算法必须求出虚拟标签的坐标和信号强度值,其坐标可根据参考标签的坐标位置计算得出,利用虚拟标签坐标和阅读器坐标可计算出虚拟标签与阅读器之间的距离,再利用距离损耗模型把距离转换为信号强度RSSI值。
改进算法思路如下:
(1)按照位置布设图,设定阅读器、参考标签和待定位标签的个数及位置;
(2)阅读器读取参考标签、待定位标签的RSSI值;
(3)利用LANDMARC算法,求取K个近邻参考标签,计算邻近参考标签的权值,邻近参考标签的位置加权得到待定位标签的位置估计值;
(4)计算估计误差;
(5)若估计误差符合精度要求,则步骤(3)中计算出的位置估计值即为最终位置估计值。若估计误差不符合精度要求,则进入下一步骤;
(6)利用步骤(3)中求取的K个近邻参考标签组成的最小矩形区域作为虚拟标签的插入区域;
(7)设定虚拟参考标签密度值,插入虚拟参考标签,利用引入路径损耗模型,根据距离求解虚拟参考标签的RSSI值。重复步骤(3)~(7),直到估计误差达到精度要求。
2.2 距离损耗模型
信号在传播过程中,随着距离的增大,信号强度会减小。通过理论分析并对大量的实验数据进行计算机拟合,建立了接收端与发射端之间的传播路径损耗模型[6]。
RSSI=-(10nlog10d+A)
(4)
式中:
A-距离发射节点1m处的接收信号强度;
n-信号传播常数;
d-发射信号与阅读器之间的距离;
RSSI-接收信号强度。
模型中A和n为常数,与环境有关。当前室内环境的传播特性,需实测传播距离与信号强度(RSSIi,di),利用线性回归分析,估计参数A和n的值。令:ρi=-10lgdi
(5)
(6)
(7)
确定模型中的A和n,传播距离d与信号强度RSSI成对数关系,根据距离可得出信号强度RSSI值。
3 仿真分析
结合LANDMARC定位原理,使用MATLAB进行仿真,在10 m×10 m的室内进行定位实验,4个阅读器放置于4个角落,4×4放置16个参考标签,待定位标签L个随机产生,本次仿真令L=8。利用距离损耗模型可获得参考标签和待定位的场强RSSI,模型参数A和n根据最小二乘拟合,最终确定A=3.8,n=2.2。K近邻算法中取K=5,在5个标签组成的最小矩形区域中以4×4的密度增加虚拟标签,仿真布局、仿真结果及定位误差分布如图4、图5、图6所示:

图4 仿真布局

图5 仿真结果

图6 定位误差
4 结论
从定位误差曲线可以看出,最大定位误差仅为0.4 m,定位误差在0.38 m以下的有75%,定位精度明显提高。该算法既可提高整个系统定位精度又不增加硬件成本,为解决室内定位提供了一种新思路。
[1] 王远哲,毛陆虹,刘辉,等. 基于参考标签的射频识别定位算法研究与应用[J].通信学报, 2010, 2(31):86-92.
[2] 董君,李吉彪.基于煤矿井下WSN的RSSI加权质心定位算法研究[J].河南机电高等专科学校学报,2015, 23(1):33-36.
[3] 马捷中,刘云超,郭阳明,等.基于最近邻居的区域定位改进算法[J].西北工业大学学报,2015, 33(1):93-96.
[4] 陈淑敏,乔晓田,毛佳,等.基于接收信号强度(RSSI)的室内二次定位方法[J].传感技术学报, 2015, 28(4):572-577.
[5] 俱莹,刘开华,史伟光,等.基于RFID的边界虚拟参考标签定位算法[J].计算机工程, 2011, 37(6):274-276.
[6] 倪巍,王宗欣.基于接收信号强度测量的室内定位算法[J].复旦学报(自然科学版), 2004, 43(1):72-76.
Improvement of LANDMARC Indoor Location Algorithm Based On RSSI
ZHOU Ya-luo1, CHENG Rui-han2, WANG Sha-sha2
(1.College of Electrical Engineering, North China University of Science and Technology, Tangshan Hebei 063009, China; 2.CollegeofInformationEngineering,NorthChinaUniversityofScienceandTechnology,TangshanHebei063009,China)
LANDMARC algorithm;virtual tag;nearest neighbor region;distance-loss model
Aiming at the problems of the limited location tags and low positioning accuracy on the LANDMARC algorithm which is based on the signal intensity, a new method is proposed that virtual reference tags are repeatedly introduced to the tracking tag’s neighbor region. Signal strength indication of the virtual reference tags can be determined by the distance-loss model. Simulation results show that positioning accuracy is improved without increasing the hardware cost and the speed of the algorithm after the improvement of the location algorithm.
2095-2716(2016)02-0087-05
TP391.9
A
