基于霍尔脉冲和机械功率的电动车窗防夹控制
2016-02-23唐希雯吴世龙艾晨晨
唐希雯,吴世龙,董 瑞,艾晨晨
(1.电子工程学院 雷抗系,安徽 合肥 230037;2.合肥工业大学 汽车工程技术研究院,安徽 合肥 230009)
图1 电枢的简化电路和电机轴的刚体模型
基于霍尔脉冲和机械功率的电动车窗防夹控制
唐希雯1,吴世龙1,董 瑞1,艾晨晨2
(1.电子工程学院 雷抗系,安徽 合肥 230037;2.合肥工业大学 汽车工程技术研究院,安徽 合肥 230009)
为避免由于机械摩擦的变化和机械传动的间隙而造成电机电流不连续产生的误判,提出电机霍尔脉冲信号检测与机械功率计算相结合的汽车电动车窗防夹控制策略。检测电机霍尔脉冲信号并判别车窗玻璃是否运行至防夹区和上限位,然后计算电机的机械功率实现对车窗障碍物的准确判断;在计算汽车电动车窗传动系统重要参数和建立永磁直流电机驱动车窗运动模型的基础上,基于MATLAB/Simulink建立汽车电动车窗防夹系统模型并进行仿真。结果表明:基于电机霍尔脉冲信号检测与机械功率计算相结合的电动车窗防夹控制策略可准确检测车窗防夹区域,有效地避免了误夹事故的发生,提升了汽车的安全性。
汽车电动车窗防夹;霍尔脉冲信号;机械功率;防夹区域
0 引 言
汽车电动车窗在现代汽车上大规模普及使用,提高了汽车的操作方便性和行车的安全性[1]。但汽车电动车窗也存在一定的危险性,在车窗上升时易发生夹持伤害事故,危害身体和生命安全。据公益组织“儿童与汽车”的调查统计报告,从1995年至2015年,至少36名儿童因电动车窗事故死亡。同样的,根据1997年美国国家统计局公布的资料显示,每年医院接收被电动车窗夹伤的人数不少于500人,超过一半是儿童[2]。为了保障乘客的人身安全,需要研究汽车电动车窗防夹控制技术[3-5]。作为安全系统中重要的一种,电动车窗防夹系统已经被国际上越来越多的厂家认可并广泛使用[6]。欧美发达国家也出台了一些相应的法规,如欧洲的74/60/EEC、美国的MVSS118,把防夹电动车窗作为汽车的一种标准配置,提升了行车安全和人性化操作感[7]。
目前汽车电动车窗防夹控制基本都是采用检测电机电流的方法来判断汽车车窗是否遇到障碍物[4]。由于车窗机械摩擦的变化和机械传动的间隙会造成电机电流的间断而产生误判断[7-10],文中采用电机霍尔脉冲信号检测与电机机械功率计算相结合的汽车电动车窗防夹控制策略,有效提高了障碍物检测的准确率。
1 电动车窗防夹工作原理
汽车电动车窗防夹,就是指在汽车车窗上升进程中遇到障碍物,夹住障碍物且达到一定力度以后,使车窗自行停止或下降,以防人或物体被夹住。汽车电动车窗防夹需要解决车窗对障碍物灵敏度与夹持力度之间的制约关系,以保证在实现车窗防夹的同时,不影响电动车窗正常的升降功能[8]。
1.1 电动车窗系统组成
电动车窗防夹控制系统有以下几个主要组成部分:直流电机、减速器、旋转—线运动变换装置、车窗滑道和相关橡胶构件—呢槽以及橡胶条[11-13]。
(1)直流电机。
直流电机直接关系到电动玻璃升降器能否正常工作,所以它要求具有个头小、质量低、防护等级高、低噪声、电磁干扰小、运行可靠等特点,同时还要有优良的防水、耐久、耐热、耐腐蚀、耐振动、不易燃烧等性能[14]。
(2)蜗轮蜗杆减速器。
由于电机本身的转速太高,不适合直接用于驱动车窗升降系统,所以这里需要减速器将电机的转速降到一定范围。此处减速比设为70:1,即电机转子每转过一周,从动轮只旋转1/70周[3,15]。
(3)卷扬轮。
卷扬轮可以把旋转运动转化成直线运动,然后通过钢丝或钢缆与减速器连接,从而牵引车窗在滑道上完成升降运动[15]。
(4)控制器。
控制器通过输出控制信号控制不同继电器的开关来实现电机的正反转驱动,从而使车窗升降。
1.2 电动车窗防夹区
电动车窗的防夹区为电动车窗无障碍上升至最大位置时距最顶端为4~200 mm的区域。该定义符合欧洲74/60/EEC和美国FMVSS118法规的相关要求[16-17]。
1.3 电动车窗防夹力
定义防夹区域之后,还应对防夹力设定一个约束值。这里采用欧洲74/60/EEC和美国FMVSS118标准,当电动车窗自动上升过程中在防夹区域内遇到超过100 N的阻力时,防夹功能应该起作用,保守防夹力欧标规定80 N,美标规定85 N[3]。
1.4 电动车窗防夹强度
(1)强度的定义:车窗上升时抵抗阻力的能力[15]。
(2)强度计算:QF=L。其中,L为单位长度;F为车窗所遇阻力。
(3)强度的人性化含义:电动车窗防夹系统不仅要有防夹功能,更应该站在使用者的立场做人性化的考虑。如果车窗在把人的手、头或其他部位夹疼甚至夹伤才采取防夹措施,那么防夹功能就失去了最初的设计意义[15]。
2 电动车窗传动系统运动学模型
2.1 车窗电机的电路方程和机械方程
(1)
(2)
(3)
(4)

2.2 拉普拉斯变换表达式

(5)
(6)
(7)
(8)
2.3 车窗电机的机械输出端
Te=TL+T0
(9)
(10)

(11)
通过拉普拉斯变换,得到:

(12)
(13)
将上述直流电机电枢回路方程与机械动力回路方程合并,可得
(14)
2.4 电动车窗传动系统结构和固定参数计算
传动系统由减速器、蜗轮蜗杆和卷扬轮组成[8-9,18-19]。实验用电动车窗传动系统主动轮齿数Z1=1;从动轮齿数Z2=70;传动比K=Z2/Z1=70;电动车窗蜗轮蜗杆传动机械效率η2=0.4;卷扬轮半径r=0.025 5m;钢丝绳卷扬轮效率η3=0.8;窗滑轨效率η4=0.8。
2.5 电动车窗动力及运动系统相关参数计算
实验用电机电感均值L=1.5mH,电枢阻值R=0.677 Ω,电源电压U=13.5 V,马达电流I=3.2 A,电机空载转速Nmax=7 214 r/min,电机效率η1=0.69,电机空载电流I0=20.8 A,电机堵转电流数值Is=0.497 A。
则:电机输入功率P1=UI=43.4W,电机的输出功率P2=P1η1=30.1W,蜗轮功率P3=P1η1η2=12W,卷扬轮上的钢缆及车窗升降线速v1=2πN2r/60=0.24 m/s,车窗提升力F1=T2η2/r=40.1 N[15]。
(2)车窗传动系统转矩和转速。
传动系统输出转矩为:
蜗轮及卷扬轮扭矩为:
T2=T1Kη2=1.29 N·m
传动系统电机转速为:
蜗轮及卷扬轮转速为:
但在综合考量了公司的整体情况后,卢春泉认为外部资金的注入对公司发展有利,因此在董事会上投了赞成票。最终,董事会一致通过此次融资方案。
通过计算电动车窗传动系固有参数以及分析建立的运动学模型可以得出:
(1)电动车窗升降系统是由永磁直流电机作为驱动源,通过卷扬轮和减速器的作用实现增大车窗提升力矩和降低车窗升降速度的传动系统;
(2)可以通过选用的电动车窗电机的主要关键参数,推导出对应的电路方程和机械运动方程,建立可进行汽车电动车窗防夹理论和仿真分析计算的系统仿真模型,为进一步的防夹控制策略建立和验证提供条件。
3 考虑机械功率计算的电动车窗防夹控制
3.1 电动车窗防夹区检测
电动车窗的升降是通过控制电机的旋转,经过蜗轮蜗杆机构进行降速增扭后,再通过卷扬轮使电机的旋转运动转换为车窗的直线升降运动[7]。在电动车窗升降过程中,由于升降速度正比于电机转轴的转动速度,可以利用霍尔传感器将电机转动生成相应方波脉冲信号并传输给电动车窗的控制器采集端口供采集。另外,电动车窗准确位置的确定,首先需要确定位置标定的基准值,具体方法如下:
通过电动车窗控制器的捕获端口对霍尔传感器的输出方波脉冲信号进行捕获,捕获从电动车窗在最低位置时开始,至电动车窗上升到最顶端时停止计数。为了确保计数值准确,采取多次采集并对采集数据进行中值滤波算法得到采集的脉冲数,即为电动车窗的位置标定基准值,并保存至电动车窗控制器的存储器中。
在进行升降过程中的软件计数时,将车窗位于最底端的位置记为零,上升过程中从零开始进行加法计数,下降过程中则进行减法计数。根据计数值与基准值对比即可得到车窗的具体位置,与欧洲74/60/EEC和美国FMVSS118法规的相关标准对比以确定车窗是否在防夹区域[7-8,20]。
采用霍尔传感器和标定基准值方法的好处在于:
(1)霍尔传感器的计数误差小,性能稳定,并且可通过调整计数磁场强度来优化计数精度;
(2)采用标定基准值确定车窗升降位置的方法,可以通过定期更新标定基准值来密闭车窗部件老化所产生的误差,提高系统的自适应性。

(15)
若K=70,K1=4,r=0.025 5 m,则Lp=0.572 mm,也就是说车窗电机每旋转1转,车窗升降2.288 mm。
电机转轴旋转检测车窗升降行程的霍尔脉冲当量,可用于电动车窗防夹区域的检测判断,是电动车窗防夹系统控制策略制定和软件程序编程的基础[15]。
3.2 电动车窗电机的机械功率计算
目前进行电动车窗防夹判断的依据大多采取电机电流检测方法,通过多次采集电动车窗受到障碍物时的电机电流值,并取平均值作为电动车窗的防夹电流阈值。在电动车窗上升过程中实时采集电机电流并与防夹电流阈值进行对比,如果实时采集电机的电流大于或等于防夹电流阈值,则认为电动车窗遇到障碍物,电动车窗停止运动并下降1 s。
上述技术方案还存在以下缺点:在电动车窗按键刚刚触动(上升或下降)时,由于电动车窗电机刚启动,还没能建立起电动车窗电机的反向电动势,电机电流会在短时间内有很大的脉冲,且电流脉冲的幅值往往比防夹电流阈值要大很多。因此,电动车窗控制器会认为车窗在升降过程中遇到了障碍物,从而启动防夹控制策略,停止电机运动,影响电动车窗正常升降功能的使用。另外由于电动车窗(静态的或动态的)摩擦的变化和机械传动的间隙造成电机电流的间断性,影响了电机是否遇障碍物发生堵转情况的准确判断。
为了避免上述技术方案所遇到的问题,采用机械功率计算的方法取代电机电流检测的方法,以防止误判断,准确判断电动车窗升降过程中遇到障碍物。机械功率计算采用电流与角速度乘积的方法,以保证计算结果能够避免由于车窗静态或动态摩擦以及机械系统传动间隙而导致的电机电流间断的状况,提高对障碍物判断的准确性,有效避免误防夹情况发生。
车窗电机通过控制自身的旋转,经过蜗轮蜗杆机构进行降速增扭后,再通过卷扬轮使电机的旋转运动转换为车窗的直线升降运动,车窗电机是永磁直流电机。图1给出了电机电枢的简化电路(见图(a))和电机轴的刚体模型(见图(b))[23]。
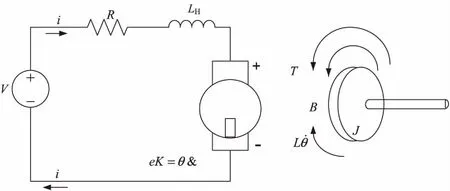
(a)电枢简化电路 (b)电机轴模型
图1 电枢的简化电路和电机轴的刚体模型

T=Kti
(16)
(17)
在SI单位制中,可以取Kt=Ke=K。
由牛顿定律和基尔霍夫定律可得:
(18)
(19)
式中,LH为电感;R为电阻;V为电压。
将转矩T作用于一刚体,使刚体以一定的角速度旋转,刚体的机械功率P可用转矩与角速度作乘积计算得到,即[24-25]:

(20)
式中,P为功率。
当电动车窗在升降过程中遇到障碍物,则会在Δt时间内出现机械功率的急剧变化,通过PWM脉宽控制电机电枢的输入电压以调制电机的启动速度,避免在电机启动阶段就出现机械功率激增状况的出现。假定起动时间为tramp,起动电压为V0,可得电动车窗电机的输入电压表达式为[19]:
(21)
式中,tramp为起动时间;Vbat为电源电压;Vm为瞬时电压;V0为启动电压;T为时间。
起动电流为:
(22)
(23)
因为电感L很小,电机电流的变化会很大。故汽车电动车窗电机刚启动时,电机转动的角速度是基于时间线性增加,并符合下列公式:
(24)
如果可以在电机转动角速度变化之前完成障碍物的检测,则电动车窗电机的机械功率公式为:
(25)
因而,检测到障碍物的机械功率变化值可定义为:

(26)
综上,汽车电动车窗的防夹采用电机霍尔脉冲信号检测与电机机械功率计算双重检验的方法。
首先,根据上述方法得到的电动车窗的位置标定基准值,采集到的霍尔脉冲信号进行电机转速计算,并与电动车窗的位置标定基准值进行对比以确定电动车窗所处的具体位置,依据欧洲74/60/EEC和美国FMVSS118法规的相关标准,以确定车窗是否在防夹区域和车窗最顶端[7-8,20]。
其次,为了避免系统会将电动车窗在启动初始阶段的电机电流激增,以及电动车窗(静态的或动态的)摩擦的变化和机械传动间隙造成的电机电流间断等情况误判为遇到障碍物,采用机械功率计算的方法取代电机电流检测的方法,预防错误判断,准确判别电动车窗升降过程中是否遇到障碍物。机械功率计算采用电流与角速度乘积的方法,以确保计算结果可以避免由于车窗静态或动态摩擦以及机械系统传动间隙而导致的电机电流间断的状况,提高对障碍物判断的准确性,有效避免误防夹情况发生。
4 仿真与结果分析
依据上述分析的永磁直流电机模型以及汽车车窗防夹区域检测原理,运用MATLAB/Simulink搭建汽车电动车窗防夹系统的仿真模型,如图2所示。
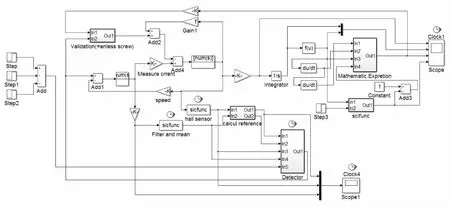
图2 汽车电动车窗防夹系统仿真模型
4.1 电动车窗正常升降
电动车窗从启动初始阶段开始,运行至最顶端过程中的电动车窗电机电枢电流的波形曲线见图3。
电动车窗处于启动初始阶段时,电动车窗电机刚启动,还没有建立起电动车窗电机的反向电动势,电机电枢电流会在短时间内有很大的电流脉冲,然后随着车窗电机反向电动势的出现而骤然减小;当电动车窗处于正常运行阶段时,由于电动车窗运行所遇到的阻力具有稳定性,因而电动车窗电机电枢电流稳定为某一常数值;当电动车窗运行至车窗的最顶端时,由于车窗运行遇到很大的阻力而使电动车窗电机产生堵转,电机电枢电流急速增大,促使电动车窗控制器中断电机驱动电流,车窗电机电枢电流骤降为零。至此,完成了电动车窗从启动初始阶段,经过稳定运行阶段,到达车窗最顶端的整个过程。
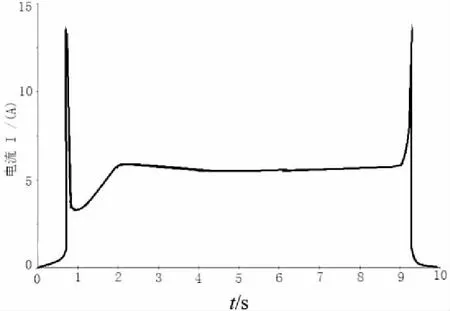
图3 电机电枢电流波形图(1)
4.2 电动车窗升降进程遇到障碍物
电动车窗从启动初始阶段开始,运行至最顶端过程中遇到障碍物的电动车窗电机电枢电流的波形曲线如图4所示。
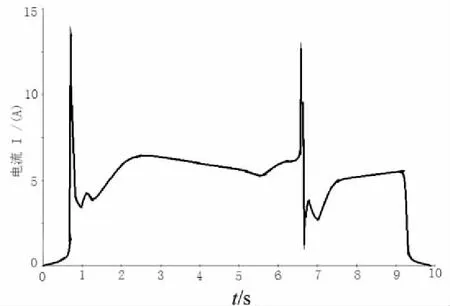
图4 电机电枢电流波形图(2)
电动车窗在启动初始阶段,电动车窗电机刚启动,还没有建立起电动车窗电机的反向电动势,电机电枢电流会在短时间内有很大的电流脉冲,然后随着车窗电机反向电动势的出现而骤然减小;当电动车窗处于正常运行阶段时,由于电动车窗运行所遇到的阻力具有稳定性,因而电动车窗电机电枢电流稳定为某一常数值;当电动车窗处于正常稳定运行阶段时,由于电动车窗橡胶件老化以及胶条和车窗玻璃之间有沙粒等导致车窗升降阻尼力增大,电动车窗电机电枢电流略有增大,但电机电枢电流仍趋于一个稳定的数值,且远远小于电动车窗防夹阈值;利用采集到的霍尔脉冲信号计算出电机转速,通过对比电动车窗的位置标定基准值确定电动车窗所处的具体位置,依据欧洲74/60/EEC和美国FMVSS118法规的相关标准以确定车窗是否达到防夹区域和车窗最顶端,当确定电动车窗稳定运行至防夹区域遇到障碍物,通过计算电机机械功率判断大于正常运行阶段的防夹阈值,则电动车窗的防夹功能启动。此时,电动车窗控制器首先中断电机电流输出,使车窗电机停止转动,然后通过输出反向驱动电流使电机反向转动,由于此时电机还没有建立起反向电动势,电机电枢电流会在短时间内有很大的反向电流脉冲,随着车窗电机反向电动势的出现而骤然减小,电动车窗电机电流经过上述波动后再趋于平稳,电动车窗稳定反向运行至车窗的安全区域后停止转动,电机电枢电流减小至零。至此,完成了电动车窗从启动初始阶段,经过稳定运行阶段遇到障碍物并执行防夹功能,使车窗反向降至安全区的整个过程。
仿真结果表明:综合考虑电机霍尔脉冲信号检测和机械功率计算的方法能够实现汽车车窗自动防夹功能。
采用霍尔脉冲信号进行电机转速计算并与电动车窗的位置标定基准值进行对比以确定电动车窗所处的具体位置;采用机械功率计算的方法取代电机电流检测可有效避免电动车窗在启动初始阶段的电机电流激增误判为遇到障碍物,以及电动车窗(静态的或动态的)摩擦变化和机械传动的间隙造成车窗电机电流的间断性,提高对障碍物判别的准确性。
5 结束语
采用电机霍尔脉冲信号检测与机械功率计算相结合的汽车电动车窗防夹控制策略,可准确确定电动车窗所处的具体位置,有效避免电动车窗在启动初始阶段的电机电流激增,以及电动车窗(静态的或动态的)摩擦变化和机械传动间隙造成的电机电流间断等误判为遇到障碍物的情况,提高对障碍物判断的准确性,提升行车的安全性。
[1] 王 义,章俊华,邱云峰.一种低成本汽车电动车窗防夹控制系统[J].测控技术,2011,30(8):45-48.
[2] 卫 蔚.车窗,儿童安全又一杀手—美汽车电动车窗事故频发[N].新民晚报,2004-07-05(07).
[3] 杜延海.应用双霍尔传感器的防夹电动车窗设计[D].上海:东华大学,2014.
[4] 马伟泽,孟德东.汽车电动窗防夹技术的探讨[J].天津汽车,2008(10):44-46.
[5] 付朝辉.电动防夹车窗技术探讨[J].汽车电器,2012(7):15-18.
[6] 杨晓玉.博泽推出第六代电动玻璃升降器防夹系统[J].现代制造,2012(18):18-18.
[7] 艾晨晨.基于μCOSⅡ的汽车电动车窗防夹控制系统设计[D].合肥:合肥工业大学,2013.
[8] 马伟泽,张申科,汪宏杰.采用霍尔传感器的汽车电动车窗防夹设计[J].汽车工程,2008,30(12):1122-1124.
[9] 戴国骏,张 翔,张怀相,等.电动车窗防夹系统的建模与实现[J].汽车工程,2008,30(6):539-541.
[10] 许师中.基于电流纹波纯硬件波形转化的车窗防夹设计[J].厦门理工学院学报,2014,22(1):11-16.
[11] 解友华.基于CAN/LIN总线的车灯和电动车窗控制研究[D].上海:上海交通大学,2007.
[12] Sui J S,Hirshey J A.Automobile CVT shift and park mechanism and powered lift gate simulation using ADAMS and CATIA[C]//Proc of international ADAMS user conference.[s.l.]:[s.n.],2000.
[13] 徐 宗,马生宝,王坤东,等.本田(HONDA)奥德赛(ODYSSEY)轿车电路—电动车窗控制系统[J].汽车电器,2005(11):12-18.
[14] 田 永,方 瑛.汽车电动车窗防夹设计探究[J].汽车电器,2014(8):12-15.
[15] 韩 阳.车窗防夹控制算法和系统的研究[D].哈尔滨:哈尔滨工业大学,2010.
[16] 李 鲁.汽车电动车窗控制电路设计[J].汽车电器,2006(7):11-15.
[17] 车用电动窗开关技术条件[S].北京:国家发展与改革委员会,2007.
[18] 刘晓明,邵亚辉,吴浩威,等.无传感器汽车车窗防夹设计[J].微电机,2007,40(4):48-50.
[19] 傅 侃,刘 博,李二涛.基于LIN总线防夹电动车窗的研究与设计[J].杭州电子科技大学学报,2008,28(3):39-42.
[20] 吴海燕,吴志红,朱 元,等.车门控制模块的电动车窗的设计[J].今日电子,2006(9):74-77.
[21] 周 易.汽车电动窗防夹系统的研发[J].北京汽车,2007(4):31-34.
[22] 易 波.基于LIN总线的汽车车窗智能控制系统的应用研究[D].武汉:武汉理工大学,2009.
[23] Daniels A R,Frommer T P,Pribisic M.Vehicle closure anti-pinch assembly having a non-contact sensor:U.S.,7 038 414[P].2006-05-02.
[24] 张寒彬,曾 红.虚拟车窗防夹测试系统的研究与实现[J].杭州电子科技大学学报,2008,28(1):56-59.
[25] 马加其.防夹电动车窗的改进[J].湖北汽车工业学院学报,2007,21(3):79-80.
Power Window Anti-pinch Control Based on Hall Pulse Signal and Mechanical Power
TANG Xi-wen1,WU Shi-long1,DONG Rui1,AI Chen-chen2
(1.Radar Confrontation Department,PLA College of Electronics Engineering,Hefei 230037,China;2.Institute of Automotive Engineering,Hefei University of Technology,Hefei 230009,China)
In order to avoid the erroneous judgement produced by the motor discontinuous current,which is caused by the gap between mechanical friction and mechanical transmission,the automobile power window anti-pinch control strategy is proposed through combining the motor Hall pulse signal detection and mechanical power calculation.Motor Hall pulse signal detection is used to judge whether to reach the window glass anti-pinch region and the upper limit,then the mechanical power window motor is calculated to achieve the accurate judgment to the detection window of obstacles.Based on calculating the main parameters of power window transmission system and the motion model of the lifting and downing window of DC motor,the power window anti-pinch system model is set up based on the MATLAB/Simulink,and the simulation has been done.The simulation shows that the power window anti-pinch control strategy,combined power window motor Hall pulse signal detection with mechanical power calculation,can accurately detect the anti-pinch region,effectively to avoid inadvertent occlusion accidents,enhancing the safety of the car.
automotive power window anti-pinch;Hall pluse signal;mechanical power;anti-pinch region
2015-05-04
2015-09-15
时间:2016-07-29
中央高校基本科研业务费专项资金资助项目(JZ2014HGBZ0054,2013bh2X0055)
唐希雯(1983-),女,硕士,工程师,研究方向为信号与信息处理。
http://www.cnki.net/kcms/detail/61.1450.TP.20160729.1833.016.html
TM331
A
1673-629X(2016)08-0119-06
10.3969/j.issn.1673-629X.2016.08.025
