基于Rankine源的集装箱船参数横摇非线性时域计算
2016-02-18赵春慧谢永和王化明
赵春慧,谢永和,王化明
(1. 浙江海洋大学 船舶与海洋工程学院,浙江 舟山 316022;
2. 浙江省近海海洋工程技术重点实验室,浙江 舟山 316022)
基于Rankine源的集装箱船参数横摇非线性时域计算
赵春慧1,2,谢永和1,2,王化明1,2
(1. 浙江海洋大学 船舶与海洋工程学院,浙江 舟山 316022;
2. 浙江省近海海洋工程技术重点实验室,浙江 舟山 316022)
三维时域数值模拟方法在求解有航速船舶运动响应方面具有一定的优势,可求解非线性自由面和大幅运动问题。对此,基于三维Rankine源法对大型集装箱船迎浪参数横摇运动进行预报,主要考虑Bernoulli方程中速度势的平方项、非线性的Froude-krylov力和恢复力及横摇阻尼二次项修正,静水压力通过在瞬时湿表面上积分获得。通过与试验结果进行对比验证,证明该方法可满足基本工程计算需求,在船舶设计过程中对参数横摇运动的预报具有一定的参考价值。
流体力学;参数横摇;Rankine源;非线性
0 引 言
参数横摇是由于共振而产生的大幅度非线性横摇运动,近年来受到国际海事组织(International Maritime Organization,IMO)的高度关注。随着IMO第二代完整稳性议题开展,参数横摇作为其中一种稳性失效模式被业界广泛关注。其研究重点主要集中在参数横摇的数值模拟方法和横摇发生幅值的预报等方面,期望找到一种在船舶设计阶段对参数横摇运动能较为准确地有效预报的方法,避免船舶因出现参数横摇现象而造成巨大的经济损失,并得到完善的第二代稳性衡准。目前针对参数横摇的第一层、第二层薄弱性衡准的制定工作已基本完成,针对第三层薄弱性衡准的直接评估方法也已取得较大的进展[1]。现阶段主要采用的研究方法包括切片理论、基于Rankine源格林函数的三维面元法等。集装箱船是目前航运业的主流船型,艏艉部外飘较大,是容易发生参数横摇现象的船型之一,对其参数横摇运动进行准确预报具有工程意义。
对于非线性水动力学问题,近年来国内外发展了多种数值求解方法。
1) 基于三维势流理论的面元法的优点主要体现在计算速度较快、结果相对可靠,目前广泛应用于船舶与海洋工程水动力学研究领域中。
2) Rankine源法又称简单Green函数法,是在自由面和物面上都分布奇点的计算方法。该方法既不满足自由面条件也不满足物面条件,在分布奇点上计算比较简单,具有较强的灵活性,近十年中得到了较为深入的研究。
KRING[2]对时域Rankine源分析方法进行较为细致的研究,提出的弱散射理论可提高预报大外飘船舶运动响应及波浪载荷的精度;同时,采用数值海岸(Artificial Wave-absorbing Beach or Sponge Layers)来满足辐射条件,采用低空间滤波(Low-pass Spatial Filter)来处理随着时间步长推进而产生的数值误差放大现象。XU等[3]通过对2艘船在时域中相互干扰的案例对数值海岸的设定方法进行较为细致的阐述。PARK等[4]对脉冲响应函数(Impulse Response Function,IRF)法和三维Rankine源法应用于船舶参数横摇数值的敏感度计算进行比较分析。近几年,随着商业软件技术快速发展,基于Rankine源法开发的分析程序越来越完善,较为经典的有美国麻省理工学院的Swan、美国海军的Lamp及挪威船级社的Sesam/Wasim等。Sesam/Wsaim以Swan程序为技术作进一步的优化研发,使其应用更具实用性。基于Rankine的面元法考虑非线性因素和时域等特点,在船舶非线性运动预报中发挥着重要的作用。
1 计算模型
选取某大型集装箱船作为研究对象,其模型主尺度及参数[5]见表1,缩尺比为1:80。模型与实体满足几何相似,即弗劳德数与斯特劳哈尔数相等。模型试验在哈尔滨工程大学拖曳水池中完成。计算模型通过在Wasim中导入编写的PLN文件生成,集装箱船三维计算模型和外部自由面计算网格见图1及图2。计算工况选取迎浪(浪向角180°)状态;航速取弗劳德数(Fr)为0.1,0.2;遭遇周期 Te与横摇固有周期 Tn的比值为0.5;波陡为1/20,1/30,1/50。

表1 某大型集装箱船模型主尺度及参数
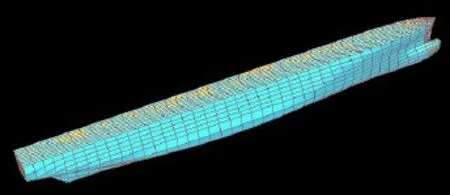
图1 集装箱船三维计算模型
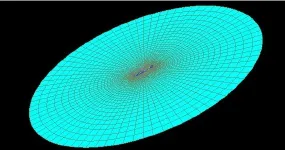
图2 集装箱船外部自由面计算网格
2 计算方法
2.1 Rankine源方法
在三维Rankine源方法中,速度势可分解为定常势、入射波速度势和扰动速度势。

线性化的运动学边界条件、自由面条件和物面条件为

式(1)~式(5)中: φI为入射波势; φd为扰动速度势。

式(6)中: mj可通过斯托克斯方法求解[4]。

式(7)中: Bj(x)为B样条函数,同归求解格林函数和边界条件,边界问题可转化为


瞬时的波面升高可通过求解式(1)得到,自由表面的速度势可通过求解式(2)得到。辐射绕射产生的水动力可通过直接在物体表面积分得到;对自由液面的重新计算考虑了非线性的Froude-krylov力和恢复力。
2.2 横摇阻尼
在预报船舶横摇运动的过程中,当横摇运动的幅值较小时,通常假定横摇阻尼力矩与横摇角速度呈线性关系;但当横摇幅值较大时,用阻尼力矩和角速度的平方更能接近实际情况。
根据自由横摇衰减试验得到的数值结果,运用消灭曲线拟合法得到横摇阻尼,结果的可靠性较高。
横摇阻尼采用二次阻尼模型,即

式(11)中: B44为横摇阻尼系数; B1为线性阻尼系数; B2为二次阻尼系数。该阻尼形式适于处理非线性较强的横摇运动。通过处理消灭曲线得到的阻尼系数见表2。

表2 横摇阻尼系数
横摇阻尼系数的设定在计算中尤为关键,对计算结果的影响较大。计算中输入得到二次阻尼无因次衰减系数,对船舶的自由横摇衰减运动进行模拟,并与拖曳水池试验结果进行比较,结果见图3和图4。通过对比可知,阻尼系数的设置满足计算要求。
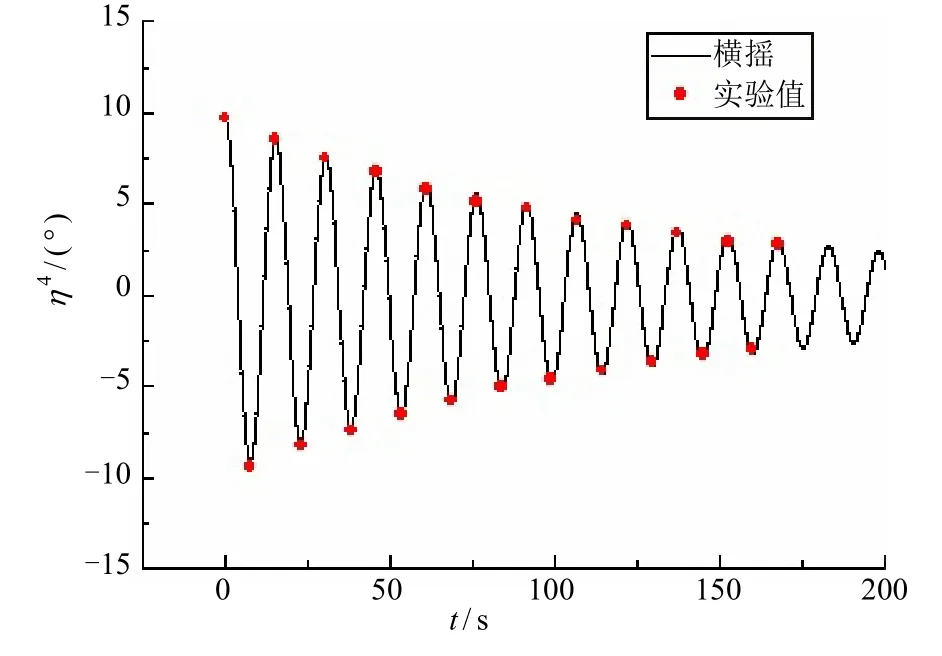
图3 Fr=0.1 自由横摇衰减曲线
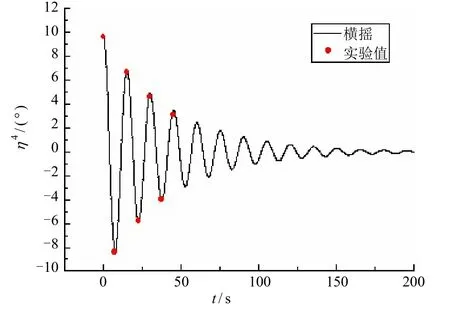
图4 Fr=0.2 自由横摇衰减曲线
3 数值模拟
对于非线性计算,由于纵荡、横荡和艏摇3个自由度不存在恢复力,因此在数值求解中产生漂移容易导致计算发散,这里应用弹簧源方法解决该问题。计算中采用Neuman方法求解定常势,以满足数值精度及稳定性的要求。通过二阶梯形蛙跳法离散自由面条件,以满足不同航速及不同网格划分尺度的收敛需求。运用数值海岸[6],通过在自由面条件中添加阻尼项来满足辐射条件。该方法在数值计算中具有明显的优势,无需划分额外的控制面面元,不会增加计算工作量。参数横摇研究工况见表3。

表3 参数横摇研究工况
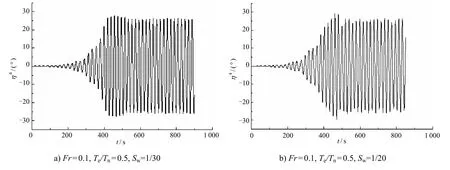

图5 不同工况下的参数横摇预报
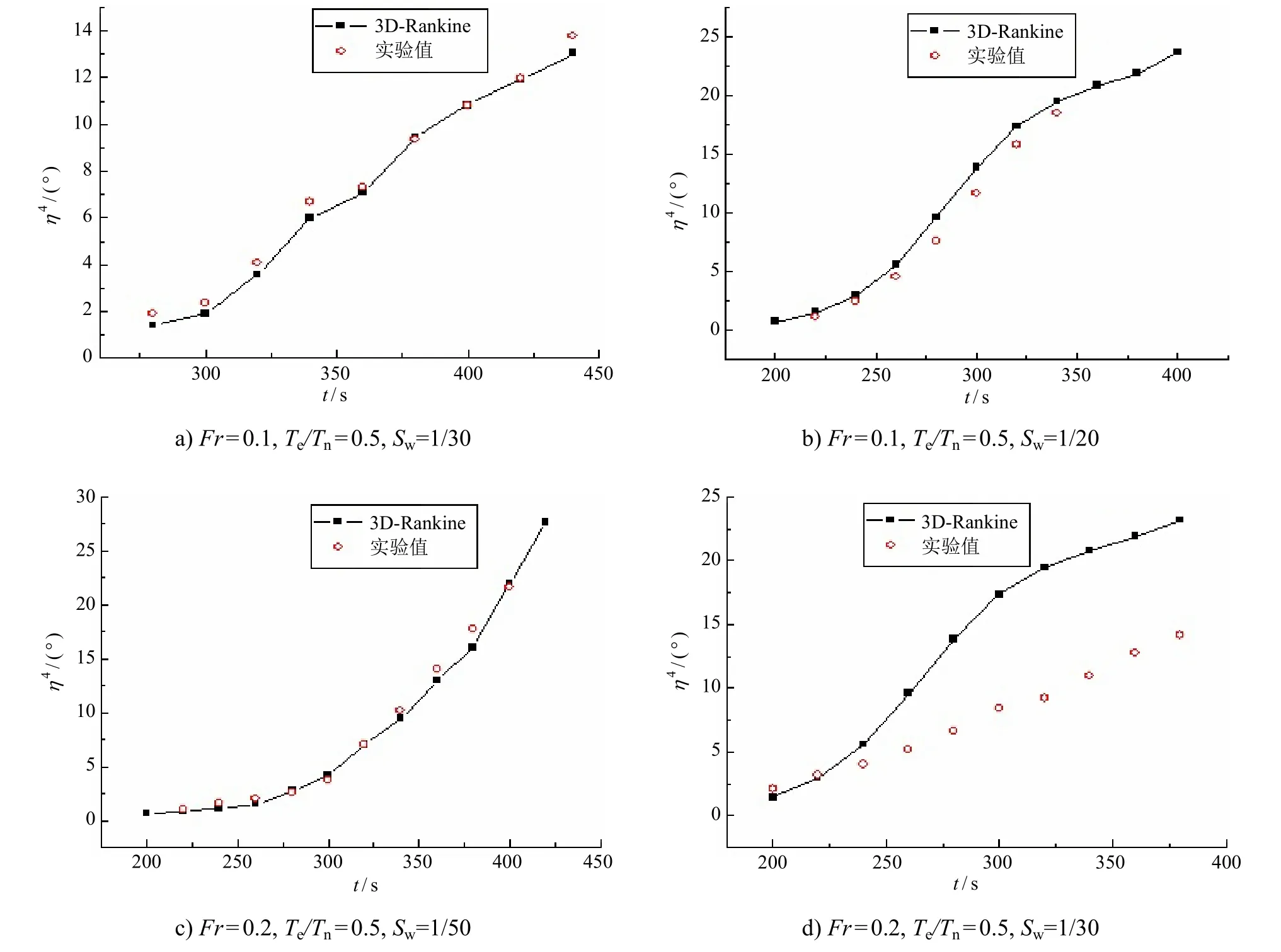
图6 不同工况下的参数横摇角幅值变化趋势
图5为不同工况下的参数横摇预报;图6为取出横摇角幅值点(即试验及数值计算中数值为正的单幅值)所作的不同工况下的参数横摇角幅值变化趋势曲线,将预报结果与试验结果进行了对比。图中横坐标为时间,纵坐标为横摇角幅值。由计算结果可知:随着波高的增加,参数横摇发生时间缩短,横摇幅值变大;在波陡相同的情况下,航速越低越容易发生参数横摇。
由图6a~图6c可知:该方法在航速较低、波高较小的情况下预报结果与试验结果吻合情况较好;在航速较大、波高较高的情况下预报结果可信度偏低,如图6d所示。通过计算可知,该方法满足基本的工程需求,可较好地预报参数横摇现象。在恶劣海况下对参数横摇的预报与试验结果相比存在一定的误差,会过高地估计横摇角度,仍存在一定的弊端,有待进一步探究较为精确的预报方法。
4 结 语
应用三维Rankine源方法对某大型集装箱船参数横摇运动进行计算,非线性因素主要考虑Bernoulli方程中速度势的平方项、非线性的Froude-krylov力和恢复力及横摇阻尼二次项修正,静水压力通过在瞬时湿表面上进行积分获得。通过计算得到以下结论:
1) 该方法可对参数横摇运动进行预报,数值计算结果与试验结果吻合程度较好,验证了试验得出的相应结论(即:低航速、高波高情况下船舶更易发生参数横摇;随着波高增大,参数横摇发生时间缩短,横摇幅值变大);
2) 该方法基本满足工程需求,在航速较低、波高较小的情况下预报结果较为可靠,但在航速较高、波高较大的恶劣海况下预报结果与试验值存在较大的偏差,会过高地估计横摇幅值。
[1] 卜淑霞,顾民,鲁江,等. 参数横摇薄弱性衡准研究[J]. 船舶力学,2015, 19 (1-2): 62-68.
[2] KRING D C. Time domain ship motions by a threedimensional Rankine panel methods[D]. Cambridge: MIT, 1994.
[3] XU X, FALTINSEN O M. Time domain simulation of two interacting ships advancing parallel in waves[C]. Proceedings of the 30th International Conference on Ocean, Offshore and Arctic Engineering, Rotterdam, the Netherlands, 2011: 1-13.
[4] PARK D M, KIM Y, SONG K H. Sensitivity in numerical analysis of parametric roll [J]. Ocean Engineering, 2013, 67 (2): 1-12.
[5] 赵春慧. 集装箱船参数横摇试验与理论研究[D]. 哈尔滨:哈尔滨工程大学,2012.
[6] 李学菊. 基于Rankine源的舰船波浪载荷时域计算方法研究[D]. 哈尔滨:哈尔滨工程大学,2009.
Nonlinear Parametric Roll Containership in Time Domain Based on Rankine Panel Method
ZHAO Chun-hui1,2,XIE Yong-he1,2,WANG Hua-ming1,2
(1. School of Naval Architecture and Ocean Engineering, Zhejiang Ocean University, Zhoushan 316022, China;
2. Key Laboratory of Offshore Engineering Technology of Zhejiang Province, Zhoushan 316022, China)
Parametric roll means the large amplitude nonlinear roll motions caused by resonance. It has attracted great attention of the International Maritime Organization (IMO) recently. 3D time domain numerical simulation method has advantages in predicting motion responses of the ship with forward speed, which can solve the problems of the nonlinear free surface and the large amplitude motion effects. Therefore, parametric roll prediction for a large containership in head waves is performed based on 3D Rankine source method, taking into account the square terms of the velocity potential in the Bernoulli equation, the nonlinear Froude-Krylov forces and restoring forces, the quadratic correction of the roll damping, and the hydrostatic pressure corresponding to the instantaneous wetted hull surface. It is proven that the method could meet the basic engineering computation requirements when compared with experimental results. This will surely provide references to the parametric roll prediction during ship design.
fluid mechanics; parametric roll; Rankine panel; nonlinear
U674.13+1;U661
A
2095-4069 (2016) 06-0022-05
2016-04-29
浙江省自然科学基金(LY14E090003;LZ15E090001;LY16E090004)
赵春慧,女,硕士,实验师,1986年生。2012年毕业于哈尔滨工程大学船舶与海洋结构物设计制造专业,主要从事船舶水动力性能及船舶耐波性研究。
10.14056/j.cnki.naoe.2016.06.005