露天矿卡车坡道运行姿态的实时分析和判定方法
2016-02-16王有仓
王有仓
(中国神华准能集团,内蒙古 薛家湾 010300)
露天矿卡车坡道运行姿态的实时分析和判定方法
王有仓
(中国神华准能集团,内蒙古 薛家湾 010300)
采用MEMS加速度传感器和陀螺仪传感器,完成了对露天矿卡车在采场内的行车姿态进行实时分析和判定。通过这些姿态的分析能够实时确定卡车行走在水平路段、上下坡道、转弯道路还是处于装载或卸载状态。掌握了这些卡车所处的状态和环境,就能更准确地计算卡车制动刹车的距离,为矿用卡车毫米波雷达防撞系统中的安全距离计算提供了依据,并实现不同道路条件下采用不同的刹车策略。为露天矿的安全生产提供先进的技术手段和方法。
卡车姿态;传感器;加速度;陀螺仪;安全距离;雷达防撞
【DOI】10.13616/j.cnki.gcjsysj.2016.07.152
1 引言
特大型露天煤矿的年采剥总量都在上亿吨。这样大的运输量必须采用与之相应的运输系统,大吨位重型卡车是主要的运输形式之一。由于其车体庞大,司机视线存在盲区。特别是在夜间行车,光线少,路况复杂,车辆频繁穿梭。这些都给安全生产带来隐患。为了减少车辆间的碰撞事故,近年来,我们对超声波测距、红外线测距、激光雷达和毫米波雷达测距都进行了试验研究和对比,得出毫米波雷达[1]更适合于露天矿采场内的重型卡车防撞系统的应用。关键是毫米波雷达探测距离远、波瓣面积大并且不受大雾和灰尘的影响。在实际的雷达防撞系统应用中,卡车行走在不同的道路条件下,给出的刹车制动策略也大不相同。那么如何确定卡车正行走在上坡道、下坡道,还是弯道上,我们采用卡车姿态传感器[2]来实时分析判断车体的倾斜状态,也就掌握了卡车所在的道路状况。
2 卡车在不同坡度道路上的刹车距离统计
为了实现露天矿重型卡车防碰撞,减少事故的发生,矿用卡车毫米波雷达技术防碰撞自动刹车系统实验成功,为矿山的安全生产提供了先进的手段和方法。在制定雷达安全刹车距离的过程中,必须对车辆安装的雷达自动刹车系统进行刹车距离实验,以便掌握车辆在不同坡道上的刹车距离变化规律,从而确定车辆的最小安全距离规则。在这个规则下使得雷达系统自动刹车后与障碍物之间保留一定的距离。
下面是通过在重型卡车经过平路、上坡和下坡路段时记录的雷达自动刹车系统采用电自动时的刹车距离曲线。如图1所示,其自动刹车距离与车辆的行驶速度有指数关系。采用最小二乘法得到了相应的曲线。


图1 卡车雷达自动刹车在坡道时的距离关系图

式中:X为代表卡车启动刹车时的速度km/h;Yx为卡车下坡雷达自动刹车距离,m;Ys为卡车上坡雷达自动刹车距离,m。

由此,可得到安全距离的一般表达式:式中,K为安全距离,雷达自动刹车系统制动后车辆与前方障碍物的安全距离;Y0为卡车刹车后距离障碍物的预留距离,一般取10m;Y为车辆雷达自动刹车系统启动后的刹车距离,对于上下坡道各采用式(1)和式(2)表达式求出。
3 车辆转弯的判断规则
3.1 MEMS陀螺仪的工作原理
陀螺仪是一种用来传感与维持方向的装置,基于角动量守恒的理论设计出来的。陀螺仪主要是由一个位于轴心且可旋转的转子构成[3],如图2所示。陀螺仪一旦开始旋转,由于转子的角动量,陀螺仪有抗拒方向改变的能力。但是,微机电系统(MEMS MicroelectroMechanicalSystems),是在微电子技术基础上发展起来的多学科交叉的前沿研究领域。由于采用了微机电系统技术,使得其尺寸大大缩小。

图2 传统陀螺仪原理图
对于MEMS陀螺仪(gyroscope)的工作原理与传统陀螺仪的工作原理不同,因为要用微机械技术在硅片衬底上加工出一个可转动的结构不是一件容易的事。MEMS陀螺仪利用科里奥利力——旋转物体在有径向运动时产生切向力的作用。因此MEMS传感器将旋转物体的角速度转换成与角速度成正比的直流电压信号,其核心部件是通过掺杂技术、光刻技术、腐蚀技术、LIGA技术、封装技术等批量生产的。
3.2 陀螺仪判断车辆转弯的原理和算法
车辆转弯程度不仅与弯道角度有关还与行车速度有关,所以适合使用角速度来描述车辆转弯程度。车辆在转弯时候角速度变化的是陀螺仪的Z轴,对Z轴多次采样取平均作为实时转向角速度,此角速度作为车辆转向程度的依据。
陀螺仪是测量物体角速度的传感器,当陀螺仪随物体运动时,陀螺仪能够测量物体绕各个轴转动的角速度,通过对角速度进行积分运算,就能得到物体旋转的角度[3]。短时间内,陀螺仪测量具有较高的精度,但陀螺仪容易受振动,因而,需要延长观测时间,这样才能把握在矿山道路上颠簸而产生的误差。转弯角速度的变化如图3所示,每秒采集10个样本,即以100ms的采样率来记录角速度的变化过程。根据图2,我们不必转换为角度,只要角速度的变化幅度超过一定的范围,即可确定为弯道行驶。通过程序的采样即可判断车辆是在弯道上行驶还是在直道上行驶。
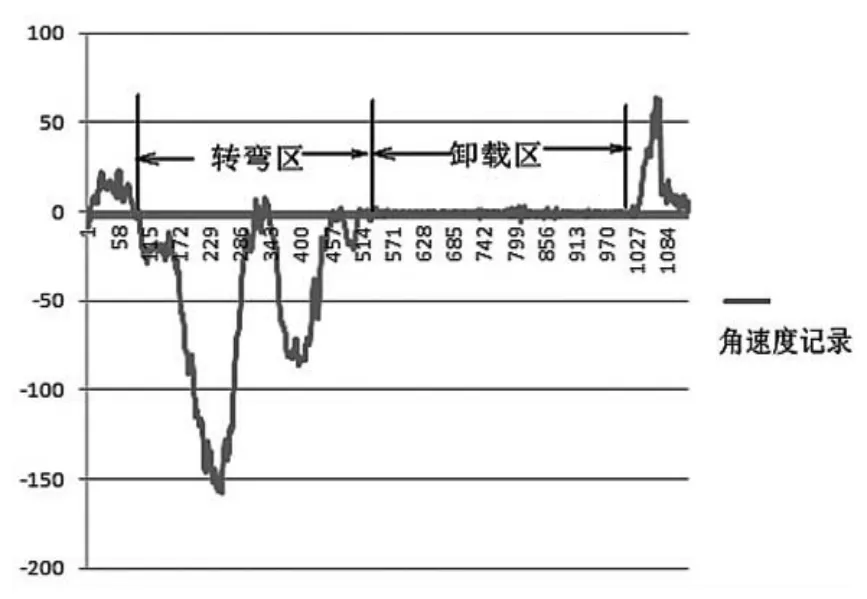
图3 角速度弯道数据记录图
4 车辆上下坡的判断规则
4.1 MEMS加速度原理
MEMS加速度与陀螺仪判断车辆上下坡的角度算法角度由加速度角AngleAccel与陀螺仪角AngleGyro融合而成。加速度角度AngleAccel的获取方式如图4所示。在稳态下,当坡度为A时重力加速度G可以在车身座标系的X轴与Z轴分解成两个正交的分加速度GX和GZ
由反正切函数可得出弧度值Aa:

再对弧度进行角度转换可得

式中,π取3.14,GX和GZ从MEMS加速度传感器中直接获取。
陀螺仪角度AngleGyro的获取方式:
陀螺仪用累加积分的方法获取角度,车身俯仰角的旋转轴为陀螺仪的Y轴,表示为Yg,因为陀螺仪的量值为旋转角速度,所以根据采样时间间隔与Yg的积分表示采样时间内的俯仰角度增量AngleGyro。

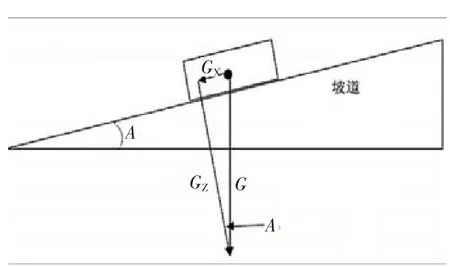
图4 斜面坡道受力示意图
4.2 加速度与陀螺仪的融合
从加速度角的计算方式可以分析出当车辆在X方向为启动或停止运动时,由于存在X方向加速度的叠加会导致三角正切运算的角度会偏离实际值。
从陀螺仪角度的计算由于采样精度的问题,采样误差在积分中会累计,适用于增量计算。
所以使用陀螺仪角来修正加速度角的偏差,用加速度角来标定基准值。
角度算法采用互补滤波方式来融合加速度角AngleAccel与陀螺仪角AngleGyro。这种滤波的原理是对AngleGyro进行高通滤波(采变化量),而对AngleAccel进行低通滤波(采稳值),最后再将两者加合,输出姿态角估计值。其公式如下,Angle为最终倾角输出值,互补公式如下:

高通滤波的目的是过滤掉长期的变量,而让短期的变量通过,这可以用来去掉陀螺仪的漂移累计误差。低通滤波的目的是过滤掉短期的变量,而让长期的变量通过,这可以用来去掉加速度计的噪声与偏差。
为了确定滤波系数a,得确定一个时间常数Tau,

式中,dt为滤波采样时间。Tau为对陀螺仪的信任度和对加速度计的信任度的界限。
当时间dt小于Tau,AngleGyro处于优先地位,AngleAccel的噪声将被过滤。当时间大于Tau时,AngleAccel的平均值将被优先考虑,这时的AngleGyro将产生漂移。Tau的选择将取决于AngleGyro何时产生比较大的累计漂移。
根据实际硬件设计,采样时间为100ms,经过实验得出Tau在取值1时,可以得到比较平滑的角度变化曲线,同时加速度的偏差也被约束到一个合理的水平。
图5是实测车辆(MT4400)在一个坡度约为4.5°的上坡时坡度变化曲图。图6为车辆下坡时坡度在4~5°时的角速度变化曲线图。其中横座标为采样点数量(时间累计),纵座标为坡度值(单位为0.1°)。结合实际路况经过验证,互补滤波方式基本满足道路坡道俯仰角的测定需求。
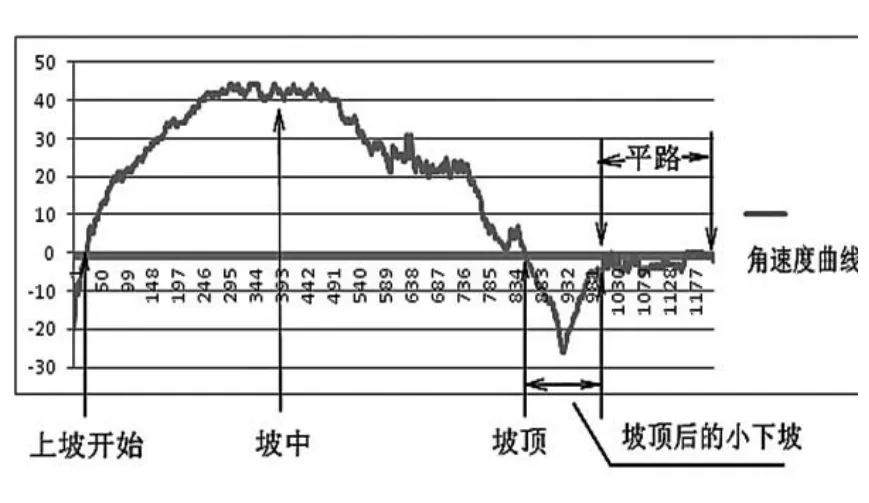
图5 上坡路坡度变化示意图
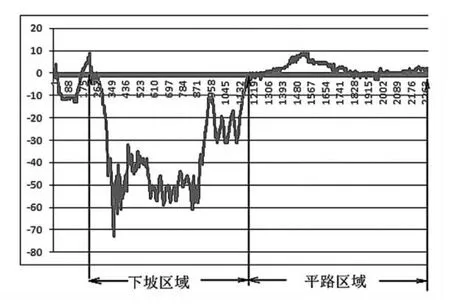
图6 下坡路坡度变化曲线图
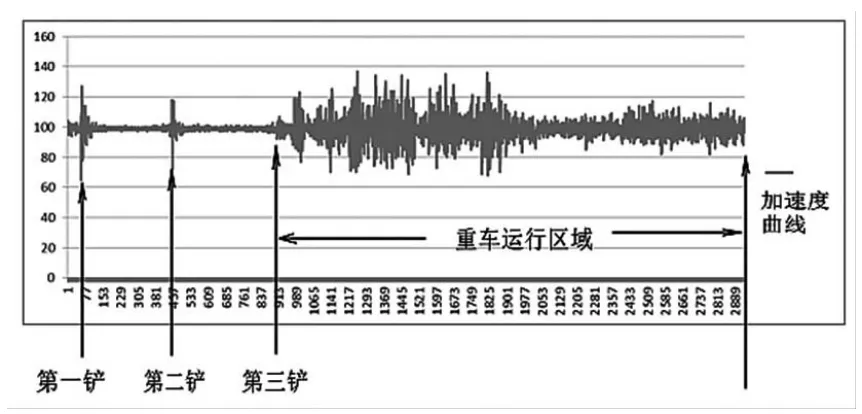
图7 卡车装载和重车运行加速度曲线图
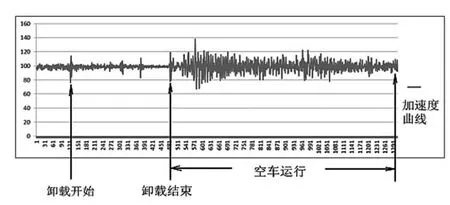
图8 卡车卸载和空车运行加速度曲线图
5 加速度判断车辆装载状态的原理算法
在车辆装载和卸载时装载物在装载或卸载时会产生有规律的震动,装载时的震动周期与铲倾倒的频率有关,卸载时与车辆卸载速度有关。最终反映在MEMS传感器上的垂直方向加速度Accel_Z会有规律的跳变。如图7为装载和重车运行时的Z轴加速度曲线图。
图8为卸载和卡车运行时的Z轴加速度曲线:
可以通过在Z轴加速度稳定时,如果产生了规律的震动可以判断为装载或卸载。区分装载和卸载使用震动间隔时间来判断,装载时间隔很长约100s。卸载时时间间隔短约40~50s,液压杆结处的震动小于20s。因此,在Z轴加速度稳定时,大于100s以上的震动判断为装载,小于50s的震动判断为卸载。
6 结论
采用MEMS传感器技术,通过对三轴陀螺仪和三轴加速度传感器的组合应用,对露天矿卡车在行车过程中所处道路条件进行实时分析和判断,从而确定车辆处于平路、上坡或下坡,同时也能够区分车辆是处于重车还是空车的状态。为矿用卡车毫米波雷达防撞系统的刹车规则打下了坚实的基础。经过矿山现场大量的实验说明,这种传感器的精度和可靠性可以达到工业现场的要求,为矿山行车安全提供了有效的技术保证。
【1】王治国,李熹,郭德淳,费元春.超宽带汽车防撞雷达的设计[J].现代雷达,2007(4):29.
【2】李怡凡,吴黎明,张力锴.一种车身姿态的捷联测量[J].传感技术学报,2010,23(8):1189-1194.
【3】NeilM.Barbour.惯性导航传感器[J].战术导弹控制技术,2009,26(4):51-62.
Real Time Analysis and Decision Method of Running Posture of Truck in Open Pit Mine
WANGYou-cang
(ChinaShenhuaJunggarEnergyGroup,Xuejiawan010300,China)
In this paper, the MEMS acceleration sensor and the gyro sensor are used to analyze and determine the running posture of the truck in the open mining area.Through the analysis of the attitude of the truck in real time to determinewhether the truck is running on the horizontal road, up and down the ramp, turningthe road or still in the loadingor unloadingstate.Masteringthe state and environment ofthe truckscanmore accuratelycalculate brakingdistance oftruck which provides the basis for the safe distance calculation in the millimeter wave radar collision avoidance system for the mine truck ,achieving different road conditionswithdifferentbrakingstrategy.Provideadvancedtechnicalmeansandmethodsforthesafeproductionforopenpitmine.
truckposture;sensor;acceleration;gyro;safetydistance;radarcollisionavoidance
TD65
B
1007-9467(2016)07-0240-03
2016-5-17
王有仓(1963~)男,内蒙古鄂尔多斯人,高级工程师,从事安监方面研究,((电子信箱)238741003@qq.com)。
