架空输电导线脱冰跳跃实验系统
2016-02-16王璋奇齐立忠王孟王剑
王璋奇,齐立忠,王孟,王剑
(华北电力大学机械工程系,河北省保定市 071003)
架空输电导线脱冰跳跃实验系统
王璋奇,齐立忠,王孟,王剑
(华北电力大学机械工程系,河北省保定市 071003)
导线覆冰是冰区架空输电线中的常见现象,导线脱冰振荡会严重影响输电塔的结构安全。为了实现对导线覆冰脱冰的多工况实验模拟,基于总线架构式设计思想,研制了一套新型导线脱冰振荡非线性模拟实验系统,主要包括脱冰模拟模块、脱冰控制模块和数据采集模块三大部分。脱冰模拟模块负责基本实验环境的搭建,可以根据不同的架空输电线工况进行设计。脱冰控制模块实现脱冰时序的设置,并按照时序高精度地模拟出各种脱冰跳跃工况。数据采集模块对导线动张力进行实施采集,并利用双目立体视觉技术实现导线脱冰跳跃轨迹测量。系统具有较高的自动化水平,控制精度良好,能够有效测得脱冰跳跃过程中的动张力和导线跳跃轨迹。
架空输电线;脱冰跳跃;非线性模拟
0 引 言
架空输电线在冬季易产生覆冰,覆冰导线容易发生舞动,影响线路安全运行[1-2]。同时,由于气温升高、自然风力或人为敲击等作用,覆冰脱离架空输电线会产生脱冰跳跃动力学过程。架空输电线脱冰跳跃产生的动张力严重影响输电塔的结构安全。2008年冰雪灾害中,有90%左右的倒塔是脱冰跳跃产生的动张力对铁塔的冲击作用所致[3]。2015年初冬沿太行山区域自北向南又发生一次范围较广的覆冰现象,因此对脱冰跳跃这一非线性动力学过程进行深入研究具有重要的意义。
目前对脱冰跳跃的研究主要采用架空输电线脱冰跳跃实验和数值仿真模拟2种方法。其中架空输电线脱冰跳跃实验架设真型架空输电线或模拟架空输电线,采用悬挂重物的方式模拟覆冰工况,通过控制重物脱离架空输电线来实现对脱冰工况的模拟,并用传感器测取架空输电线脱冰跳跃过程中的动态特性。数值仿真模拟是指在大型有限元软件中建立架空输电线模型,采用集中力法、增减密度法、单元生死法等方法模拟覆冰脱冰工况,并对脱冰跳跃过程中的动力学特性进行计算[4]。
数值仿真模拟方法成本较低,效率较高,因此被广泛采用。但仿真结果往往需要与实验结果进行对比。目前,不少专家学者搭建架空输电线脱冰跳跃模型进行实验研究。Jamaleddine[5]等人架设了2个档距为3.222 m的架空输电线连续档缩小模型,重物通过细电熔丝悬挂在架空线上,模拟导线覆冰工况。当电熔丝通电时熔化断开,重物脱落,完成脱冰跳跃工况模拟。该实验系统中采用的电熔丝抗拉强度不高,因此只能用于微型架空输电线系统的仿真,无法模拟大档距、厚覆冰工况。西安工业大学研制出了一种常闭型电磁开关用于悬挂重物,架空输电线采用一段钢丝绳模拟,电磁开关连接沙袋悬挂于钢丝绳上模拟覆冰工况,拨动控制开关后常闭电磁开关打开,重物坠落,实现脱冰工况的模拟。该系统中由于电磁开关比较笨重,无法进行微型架空输电线脱冰实验。国网武汉超高压研究院搭建了一段档距为235 m的真型导线(LGJ-630/45)进行脱冰跳跃模拟实验,其覆冰载荷通过在架空输电线上等间距地悬挂10个重物实现,通过远程控制重物坠落模拟导线脱冰工况。目前关于架空输电线脱冰跳跃的研究,大多局限于整档或部分档同期脱冰工况,而事实上,架空输电线覆冰往往在不同时刻脱落[6-8],即非同期脱冰,而对于非同期脱冰方式的实验研究目前还未见表述。
国内外学者已对单一工况下的架空输电线脱冰跳跃模拟实验展开大量的研究,但尚缺乏一套针对多种工况的标准化脱冰跳跃实验系统[9]。在深入分析系统需求的基础上,针对多种工况,提出基于总线架构思想的架空输电线脱冰跳跃实验系统实现方案,设计并研制新型导线脱冰振荡非线性模拟实验系统。系统应用改进的脱冰控制模块,实现非同期脱冰工况的模拟,能够以高时序精度实现多种覆冰工况下的脱冰跳跃,并实时采集架空输电线端部动张力图以及导线跳跃轨迹的时程变化特性。
1 总体结构
1.1 系统需求分析
架空输电线脱冰跳跃属于复杂非线性动力学过程,是一种特殊的自然现象。研究该过程所用实验系统需要能够准确模拟该过程,且能分析其复杂动力学特性。目前的架空输电线脱冰跳跃实验系统在实际应用时常常出现利用效率低下、适用性单一等问题,为克服这些弊端,系统设计需满足以下特征。
(1)功能健全。系统能够实现多种脱冰跳跃工况的模拟。现有的脱冰跳跃实验系统仅限于模拟整档同期脱冰和部分档同期脱冰[5],而实际输电线路还存在非同期脱冰工况,即架空输电线覆冰按某一时序依次脱落[4]。本实验系统在现有系统功能的基础上加入非同期脱冰功能,使系统能够按照指定的非同期脱冰时序进行动作。
(2)脱冰动作时序精度高。系统能够完成高精度脱冰时序动作。在系统实现整档同期脱冰过程中,各覆冰重物需在同一时刻完成脱落动作;在实现非同期脱冰过程中,各覆冰重物坠落时间差需满足一定的时间精度。本实验系统时间精度控制在ms级,可以实现10 ms及以上时间间隔的脱冰动作。
(3)灵活性强。系统能够模拟多种架空输电线覆冰工况。架空输电线种类繁多,架设档距档数以及同样覆冰厚度下的冰重比载也存在差异。而目前研制的脱冰跳跃实验系统局限于小型架空输电线工况的模拟,亦或由于覆冰重物笨重而只能用于大档距脱冰跳跃工况的模拟。本实验系统针对不同档距和线型选择不同吸力的电磁铁和不同质量的覆冰重物,使得系统具有较强的灵活性,能适用于多种覆冰工况下的脱冰跳跃实验。
(4)自动化程度高。系统能够实现高度自动化控制。系统采用控制软件对脱冰时序进行自动化设置,动作的执行也采用总线控制的方式实现,提高了实验效率。原有脱冰跳跃实验系统功能较单一,只能够完成整档或部分档同期脱冰。本实验系统加入非同期脱冰功能,使得实验过程复杂度大大增加。尤其在大档距情形下,由于需要整档内均匀加载覆冰重物,实验系统铺设跨度增加,操作难度提高,因此提高系统的自动化程度尤为重要。
1.2 系统总体设计思想
根据系统总体需求特性,引入总线架构式设计思想,将系统分割为多个功能子模块,每个功能子模块挂接在总线上进行统一配置管理以实现相应的功能。具体实现方式为:设计多个架空输电线脱冰跳跃控制装置,每个装置分别管理4路覆冰重物,各个装置通过总线连接,统一进行设置并实现脱冰工况模拟。这种设计方式大大提高系统的自动化水平,直接对总线进行操作即可控制所有子模块,且各路覆冰重物相互独立,通过远程设置能够完成任意时序的脱冰动作,同时系统可以通过增加或减少脱冰控制装置以适应于不同实验档距。实际的架空输电线工况较多,实验系统需满足诸如孤立档、连续档,真型输电线或模拟实验输电线(地线)等多种工况的模拟要求。
1.3 系统总体结构
架空输电线脱冰跳跃实验要求能够建立一段架空输电线模型,实现覆冰脱冰工况模拟,同时也能采集脱冰跳跃过程中的动力学特性。对应以上基本要求,将系统分为脱冰模拟模块、脱冰控制模块以及数据采集模块3大基本模块。其中脱冰控制模块是脱冰跳跃工况实现的关键,由脱冰控制硬件部分和脱冰控制软件部分组成。架空输电线脱冰跳跃实验系统的总体结构如图1所示。
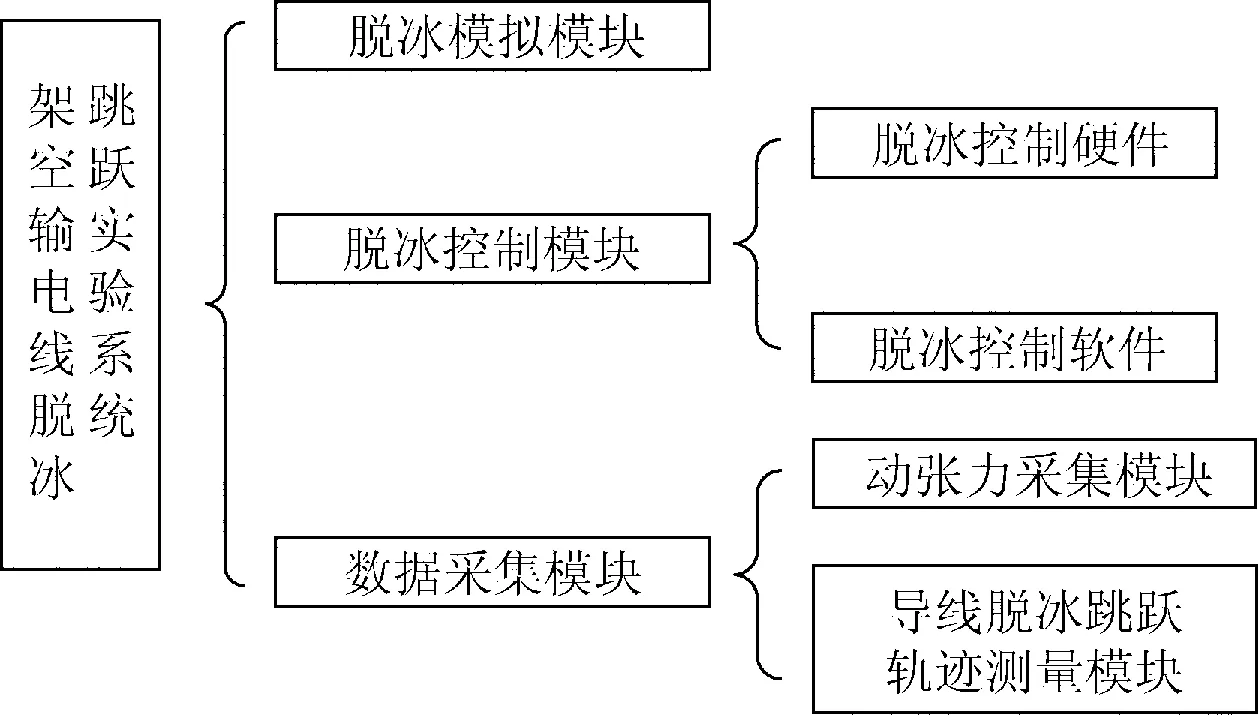
图1 系统总体结构图Fig.1 Total structure diagram of system
脱冰模拟模块架设一段实验架空输电线,并实现覆冰脱冰等基本功能,完成基本实验环境的搭建。为适应于各种架空输电线工况,脱冰模拟模块根据具体实验工况进行设计与调整。脱冰控制模块实现架空输电线覆冰和脱冰工况的模拟,其中脱冰控制软件负责脱冰时序的远程设置并发送指令,脱冰控制硬件负责按照指令执行脱冰动作,该部分与架空输电线的工况和类型并无关系,可以采用统一的方式实现。数据采集模块用于实时测取架空输电线脱冰跳跃过程中的动张力以及跳跃轨迹时程,以供特性分析。
2 脱冰模拟模块
脱冰模拟模块完成架空输电线脱冰实验基本环境的模拟,搭建一段孤立档或连续档架空输电线,具体情况依据实验条件灵活确定。可以采用真型输电线,直接将实验系统应用于架空输电线路上,也可以采用模拟架空输电线。对于不同的架空输电线,系统在设计覆冰重物时需依据架空输电线的尺寸和覆冰厚度具体确定重物质量。脱冰模拟模块的重点在于覆冰重物的设计和覆冰脱冰工况的实现。
2.1 覆冰模拟设计
当气温低于冰点时,过冷却水与雾凇共同作用下会形成混合淞,混合淞密度大,粘附力强,易在架空输电线表面形成冰层[10],该冰层一般呈圆柱状或近似椭圆状,并通常在整个线路档内都有附着。为模拟实际覆冰工况,Kollár[11-12]等人进行了架空输电线湿雪脱落实验,其覆冰工况采用在架空输电线上压合湿雪的方式来进行模拟,但该实验方式受气候条件限制,只能在冷库或严寒的冬季进行。诸多学者采用在架空输电线上等间距悬挂集中质量的方式模拟覆冰,王璋奇[13]等人将该方法与真实覆冰法进行了对比,发现2种方法得到的架空输电线张力时程曲线在脱冰初期基本吻合,因此本实验系统采用集中质量法在架空线上悬挂重物实现覆冰模拟。
不同直径的架空输电线在不同覆冰厚度工况下会承受不同质量的覆冰载荷,为方便调整覆冰质量,覆冰重物采用不同质量的沙袋,沙袋填装质量依据不同的覆冰厚度工况和导线型号确定。架空输电线覆冰工况采用等间距悬挂重物的方式实现,重物质量与等效覆冰质量对应。架空输电线覆冰质量的计算公式为
mice=ρiceπb(b+D)×106
(1)
式中:mice为架空输电线单位长度上的覆冰质量,kg/m;ρice为冰密度,这里取0.9×103kg/m3;b为覆冰厚度,mm;D为导线直径,mm。这里假设导线覆冰截面为圆环状。
根据式(1)计算导线在不同覆冰厚度情况下的覆冰质量,进而可以计算得出单个重物质量,其计算公式为
mload=miceL/n
(2)
式中:mload为单个重物质量,kg;L为档距,m;n为悬挂重物数量,个。
覆冰的模拟需要根据具体的实验架空输电线工况进行设计,通过灵活调整覆冰重物的质量和数量进而能够适应于各种工况。
2.2 覆冰脱冰工况实现
架空输电线覆冰脱冰工况的实现是实验的关键,本系统采用集中质量法模拟覆冰工况,重物与架空输电线采用电磁铁吸附的方式连接,便于脱冰工况的实现。经过华北电力大学输电线路工程实验室的实践应用,验证了本实验方法的有效性[14]。
本系统采用电磁铁吸附的方式模拟覆冰工况[15-16],架空线上等间距地安装轻质铁吸盘,吸盘尺寸和电磁铁型号根据架空线直径而定。电磁铁通断电由脱冰控制模块统一控制,当电磁铁通电时,产生吸力,电磁铁挂接沙袋悬挂于导线上,实现覆冰状态的模拟;当电磁铁断电时,失去吸力,沙袋脱离架空输电线,完成脱冰过程的模拟。
3 脱冰控制模块
脱冰控制模块由脱冰控制硬件和脱冰控制软件2部分组成。软件部分完成脱冰时序的设置,实现远程操作功能;硬件部分按照指定脱冰时序执行脱冰动作。
脱冰控制硬件主要由脱冰控制装置、控制箱以及供电系统组成,其中脱冰控制装置主要实现架空输电线非同期脱冰过程,该装置是实现指定脱冰时序动作的关键,也是模拟非同期脱冰跳跃工况的核心。
3.1 脱冰控制装置原理
控制装置的核心管理芯片为8位高性能单片机AVR ATmega128,主管接收配置指令,返回配置信息,接收执行指令,并驱动电磁铁进行动作。为避免电磁铁动作过程中产生的感应电压对系统的影响,采用光耦驱动电路将 ATmega128芯片与电磁铁接口进行隔离。
脱冰控制装置控制电路的原理如图2所示。为增强系统的可扩展性,脱冰控制装置采用相同的内置控制电路。各装置具有等价性,当实验系统需要增加覆冰重物时,只需增加相应的脱冰控制装置即可。同理,对于覆冰重物数量需求较小的情况,只需减少相应的控制装置即可满足要求。同时由于控制装置中每路电磁铁可独立工作,增加或减少接入电磁铁的路数也可以实现覆冰重物数量的增减。
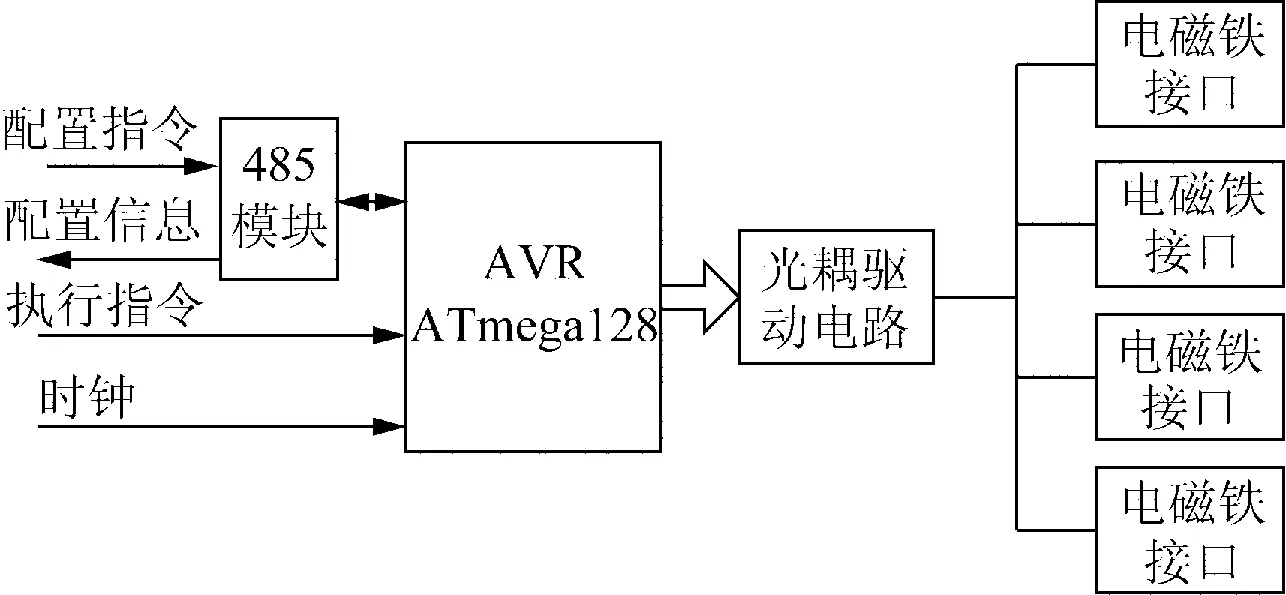
图2 控制电路原理图Fig.2 Schematic diagram of control circuit
3.2 系统总线结构
系统采用总线架构进行设计,将各个脱冰控制装置挂接在总线上,方便对各装置进行统一管理与控制。系统总线包括3个部分:485通信总线、控制总线以及电源总线。其逻辑架构图如图3所示。
系统统一应用计算机上安装的控制软件对各个脱冰控制装置进行配置,具体实现过程为控制软件向控制箱发送脱冰时序配置指令,控制箱接到配置指令后将指令通过485总线发送给各个脱冰控制装置,脱冰控制装置根据自身地址进行指令识别,完成相应配置,并向485总线返回配置成功信息。控制箱发送指令完毕后即开始监视总线中的返回信息,并将信息反馈给计算机,供操作人员及时检查。
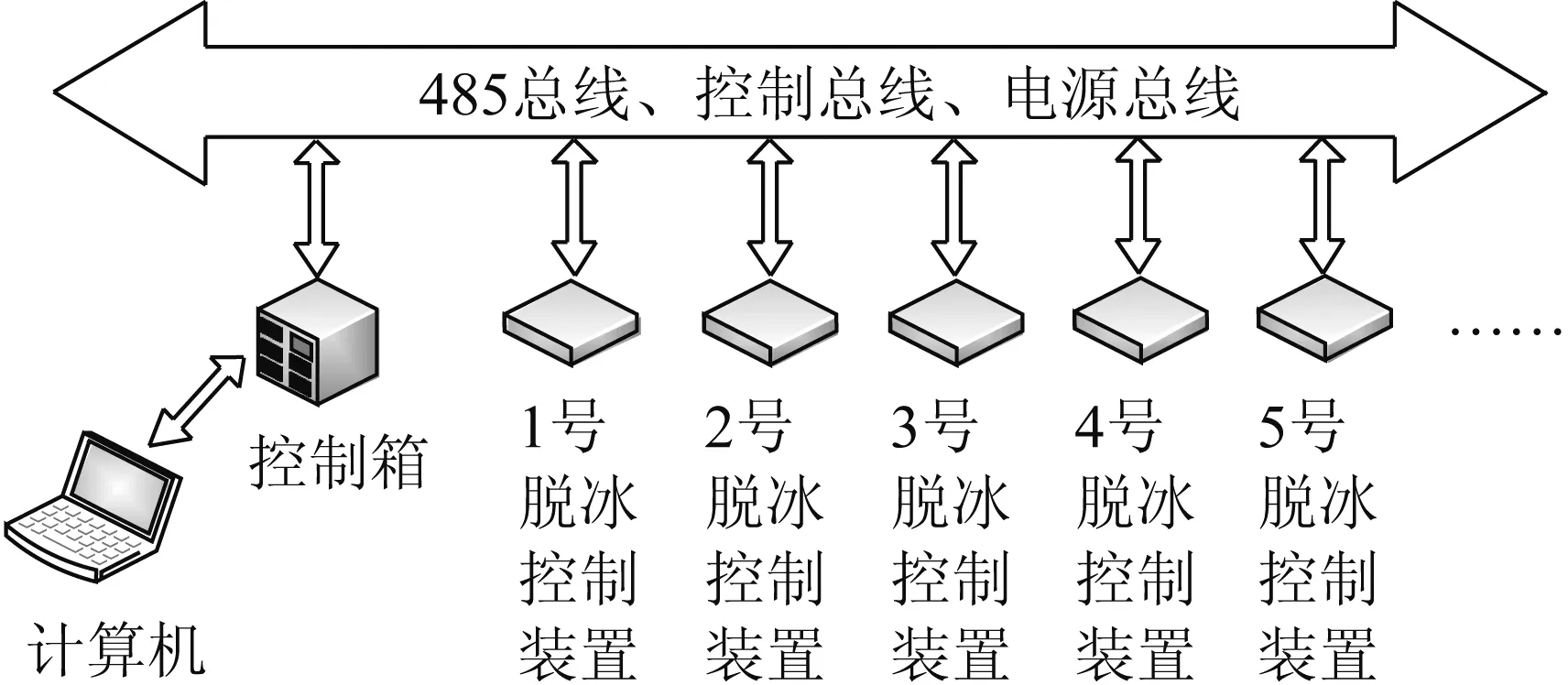
图3 系统总线逻辑架构图Fig.3 Bus logical structural diagram of system
为确保系统执行时间精度,脱冰动作指令通过控制总线传递,各脱冰控制器接收到动作指令的时间一致。由于系统总体呈长链状,跨度较大,采用电源总线为各个系统供电,避免了复杂的独立供电。需要说明的是,为与后文验证性实验保持一致,图3给出了5个脱冰控制装置挂接图,实际系统可以挂接更多的脱冰控制装置以满足覆冰重物需求量大的实验场合。
3.3 指令格式
非同期脱冰控制装置的配置指令可以实现地址配置和时序配置两大功能。地址配置实现对控制装置地址的灵活配置,当增加非同期脱冰控制装置时,只需对新增装置进行地址配置即可接入系统,提高了系统的可扩展性。时序配置指令以数据帧的方式传输,每个数据帧中含有设备地址、各设备中的电磁铁编号以及执行时序等信息。每个数据帧用于配置一个非同期脱冰控制装置中的一路电磁铁,因此每路电磁铁动作的执行相互独立,可以组合出多种脱冰时序。控制装置完成时序配置后返回配置成功信息,控制软件接收到该信息后以弹出框的形式显示出来,以供及时检查是否配置成功。
指令统一编辑为数据帧,数据帧包含6个八位二进制码,帧头和帧尾分别统一为“0xeb”和“0x90”,数据帧中间部分分别包含了设置地址、设置每路动作时间、查询、清除等功能代码。其中“功能号”区别指令的功能,“地址”表示设备的地址号,“保留”字段统一使用“0x00”填满。此处,“电磁铁号”分别为每个脱冰装置中4路电磁铁标示,该编辑方式可以对每个脱冰控制装置中的各路电磁铁进行时序设置。“时间高位”和“时间低位”用于设置电磁铁动作执行时间,具体时间为“‘时间高位’×256 + ‘时间低位’”,单位为 ms。
另外,动作指令由开关控制产生,该指令为一个低电平(0 V)到高电平(12 V)的跳变。各控制装置接收到动作指令后,进入中断程序,触发内部计时器开始计时,当该时间达到设置的动作时间时驱动继电器切断电磁铁电源,覆冰重物脱离架空输电线,完成脱冰动作。
3.4 脱冰动作执行
脱冰动作按照指定的时序执行是本实验系统实现非同期脱冰工况模拟的关键,系统对每路电磁铁进行独立控制以避免其相互干扰,每路电磁铁动作执行流程如图4所示。

图4 脱冰跳跃执行流程Fig.4 Ice shedding execution flow
实际线路非同期脱冰时,各覆冰重物脱落之间的时间差很小。因此,系统设定脱冰跳跃时间精度为 1 ms。脱冰控制装置核心芯片ATmega128提供2种时钟模式,一种是由内部RC振动器提供时钟源,另一种则由外部晶振提供时钟源。这里开启外部晶振模式,并在XTAL引脚上接入稳定8 M晶振。
3.5 脱冰控制软件
脱冰控制软件是实验人员对脱冰过程进行配置的操作平台,软件采用高级编程C语言编辑,操作过程简便,便于快速配置各覆冰重物的脱冰时序。软件提供485通信配置、脱冰时序配置、设备检测以及地址配置等功能。其中485通信配置功能用于串口配置连接,脱冰时序配置功能用于配置各路电磁铁动作执行时序,设备检测功能用于检测每个脱冰控制装置的连接状态,地址配置功能可以分别配置脱冰控制装置的地址。同时,脱冰控制软件能够接收各脱冰控制装置反馈的信息,以便状态检查。
脱冰时序是本实验系统的关键,脱冰控制装置可以实现 ms 级时间间隔精度。软件以 ms 为单位,分别对每路电磁铁进行时间设置。每路电磁铁执行时间相互独立,可以设置成任意时序组合,该功能确保系统能实现非同期脱冰。
系统用于研究架空输电线在相对较短的时间里完成的脱冰跳跃动态过程,整档导线脱冰时延超过90 s则不在本实验系统考虑范围内。
4 数据采集模块
4.1 动张力采集模块
架空输电线脱冰产生跳跃振荡,导线端部张力会发生动态变化。系统设计动张力采集模块,实现对架空输电线动张力变化数据的实时采集。
将张力传感器串接在架空线端部的耐张线夹与绝缘子挂点之间,对脱冰跳跃过程中的动张力进行实时采集,系统应用量程为0~10 000 kg的电阻应变式张力传感器,其综合精度为0.02(线性+滞后+重复性),灵敏度为2.0 mV/V,传感器将张力值转变为电阻应变再经过变送器转换为0~5 V标准模拟电压量。其中变送器中安装有精密电桥,张力传感器内部电阻由于张力作用而发生变化,该变化导致电桥失衡,输出正比于张力值的模拟电压,再经过滤波放大处理后,输出标准电压量。该电压经DT9800高性能数据采集卡采集,并通过数据线传送至计算机中的数据采集软件DEWEsoft,软件将该值转换为导线端部实时动张力,并绘制时程曲线。动张力采集模块的具体实现原理如图5所示。

图5 动张力采集模块原理图Fig.5 Schematic diagram of dynamic tension acquisition module
4.2 导线脱冰跳跃轨迹测量模块
导线脱冰后在竖直和水平两个方向上都会有振动,本系统采用双目立体视觉技术实现对导线脱冰跳跃轨迹的测量。
双目立体视觉技术原理如图6所示。分别建立世界坐标系OwXwYwZw,相机坐标系Oc1Xc1Yc1Zc1和Oc2Xc2Yc2Zc2,图像物理坐标系O1X1Y1和O2X2Y2,图像像素坐标系Ouv1U1V1和Ouv2U2V2,由单个相机投影原理,可以得到像素坐标u、v与世界坐标xw、yw、zw之间的关系为
(3)
式中:k和s是比例因子;fx与fy分别为x方向和y方向上的尺度因子;(u0,v0)为主点坐标;R和T为世界坐标系到相机坐标系的旋转矩阵以及平移向量。
对于任一测量点,可以得到两个图像像素坐标(ul,vl)、(ur,vr),代入式(3),得到4个方程,利用最小二乘法进行求解,即可以得到被测点在世界坐标系中的三维坐标。

图6 双目视觉原理Fig.6 Principle of binocular vision
导线脱冰跳跃轨迹的测量原理如图7所示。系统采用2个可调焦相机作为双目系统硬件,相机焦距可调范围为2.8~12.0 mm,分辨率为1280*720,上位机采集软件利用MATLAB软件编写。使用时,首先利用棋盘格标定板对左右相机的内参数和外参数进行标定,其次通过上位机控制相机连续拍摄导线跳跃图像,然后在上位机中利用图像中导线与双目系统极线有交叉的特性进行特征点匹配,最后计算出导线脱冰过程中的运动轨迹。通过对运动轨迹进行时运和频域分析,可以发现导线脱冰跳跃轨迹的多项特征。
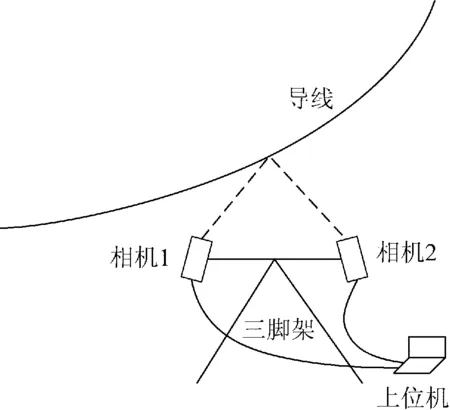
图7 导线脱冰跳跃轨迹测量Fig.7 Jump track measurement of ice shedding
5 结 论
针对现有导线脱冰实验系统适用性单一的问题,基于总线架构式设计思想,设计并研制了一套新型导线脱冰振荡非线性模拟实验系统。使用该系统进行了验证性实验,并得出以下结论。
(1)本系统在现有实验系统基础上,通过对脱冰控制模块硬件、软件部分的改进,能够实现任意时序组合的非同期脱冰工况模拟,提升了实验系统的适用性。
(2)本实验系统能够实现高精度的准确控制,将时间精度设置为ms级,保证同期脱冰实验的同时性与非同期脱冰实验的时序精度。
(3)通过动张力采集模块和导线脱冰跳跃轨迹测量模块对脱冰跳跃过程中的动张力和跳跃轨迹进行实时采集,以供进一步动力学分析。
(4)本系统采用总线架构式设计,通过对3大模块的精细化设计,使系统功能更全面,灵活性更强,自动化程度更高,能够适用于多种输电线脱冰跳跃工况。
[1]胡红春. 冰害、冰闪和舞动的防治措施[J]. 电力建设, 2005, 26(9): 31-33, 44. HU Hongchun. Prevent and cure measurements for icing disaster, icing flash and galloping[J]. Electric Power Construction, 2005, 26(9): 31-33, 44.
[2]蒋兴良, 周仿荣, 王少华, 等. 输电导线覆冰舞动机理及防治措施[J]. 电力建设, 2008, 29(9): 14-18. JIANG Xingliang, ZHOU Fangrong, WANG Shaohua,et al. Mechanism of icing-caused conductor galloping and its prevention[J]. Electric Power Construction, 2008, 29(9): 14-18.
[3]杨靖波,李正,杨风利,等. 2008年电网冰灾覆冰及倒塔特征分析[J].电网与水力发电进展, 2008, 24(4): 4-8. YANG Jingbo, LI Zheng, YANG Fengli, et al. Analysis of the features of covered ice and collapsed tower of transmission line snow and ice attacked in 2008[J].Advances of Power System & Hydroelectric Engineering,2008,24(4):4-8.
[4]沈国辉, 徐晓斌, 楼文娟,等. 导线覆冰脱冰有限元模拟方法的适用性分析[J].工程力学,2011, 28(10): 9-15, 40. SHEN Guohui, XU Xiaobin, LOU Wenjuan, et al. Applicability analysis of finite element methodologies to simulate the ice-accreting and ice-shedding on transmission lines[J].Engineering Mechanics, 2011, 28(10): 9-15, 40.
[5]JAMALEDDINE A, BEAUCHEMIN R, ROUSSELET J, et al. Weight-dropping simulation of ice-shedding effects on an overhead transmission line model[C]//Proceedings of the 7th International Workshop on Atmospheric Icing of Structures (IWAIS’96). 1996: 44-48.
[6]沈国辉,袁光辉,孙炳楠,等. 考虑脱冰速度效应的输电线路脱冰模拟[J].重庆大学学报,2010, 33(9): 132-138. SHEN Guohui, YUAN Guanghui, SUN Bingnan, et al. Simulation of ice-shedding on tranmission lines considering ice-shedding velocity effect[J]. Journal of Chongqing University, 2010, 33(9): 132-138.
[7]KALMAN T, FARZANEH M, MCCLURE G. Numerical analysis ofthe dynamic effects of shock-load-induced ice shedding on overhead ground wires[J]. Computers & Structures, 2007, 85(7): 375-384.
[8]FARZANEH M. Atmospheric icing of power networks [M].Springer Science & Business Media, 2008.
[9]王璋奇,王剑,齐立忠. 同期脱冰架空输电导线的动张力特性实验研究[J]. 噪声与振动控制, 2016, 36(1): 157-161. WANG Zhangqi, WANG Jian, QI Lizhong. Experimental study on the dynamic tension characteristics of the overhead transmission conductor under synchronous ice shedding[J]. Noise and Vibration Control, 2016, 36(1): 157-161.
[10]苑吉河,蒋兴良,易辉,等. 输电线路导线覆冰的国内外研究现状[J].高电压技术, 2003, 30(1): 6-9. YUAN Jihe, JIANG Xingliang, YI Hui, et al. The present study on conductor icing of transmission lines[J]. High Voltage Engineering, 2003, 30(1): 6-9.
[11]KOLLAR L E, OLQMA O, FARZANEH M. Natural wet-snow shedding from overhead cables[J]. Cold Regions Science and Technology, 2010, 60(1): 40-50.
[12]KOLLAR L E, FARZANEH M. Vibration of bundled conductors following ice shedding[J]. IEEE Transactions on Power Delivery, 2008, 23(2): 1097-1104.
[13]王璋奇,齐立忠,杨文刚,等. 集中质量法模拟覆冰在架空线脱冰动张力实验中的适用性研究[J].中国电机工程学报, 2014, 34(12): 1982-1988. WANG Zhangqi, QI Lizhong, YANG Wengang, et al. Research on the applicability of lumped mass method for cable’s dynamic tension in the ice shedding experiment[J]. Proceedings of the CSEE, 2014,34(12): 982-1988.
[14]杨文刚,苏士斌,王璋奇. 导线脱冰振动的模拟实验研究[J].振动、测试与诊断, 2013, 33(5): 892-896. YANG Wengang, SU Shibin, WANG Zhangqi. Simulated experiment of ice shedding from cable[J]. Journal of Vibration, Measurement & Diagnosis, 2013, 33(5): 892- 896.
[15]王璋奇, 江文强. 架空线覆冰载荷模拟试验装置: 201120177573.3[P]. 2011-12-28.
[16]王剑, 王璋奇, 江文强, 等. 输电线路脱冰模拟试验系统: 201220701605.X[P]. 2013-05-22.
(编辑 景贺峰)
Ice Shedding Experimental System for Overhead Transmission Lines
WANG Zhangqi , QI Lizhong, WANG Meng, WANG Jian
(Mechanical Engineering Department, North China Electric Power University, Baoding 071003, Hebei Province, China)
Ice shedding occurs frequently on overhead transmission line in ice area. The line vibration caused by ice shedding may reduce the structure safety of transmission tower. In order to implement the experiment simulation for the ice shedding of transmission line under multi-operating conditions, this paper develops a new nonlinear simulation experiment system of ice shedding for overhead transmission lines based on bus architecture design, which consists of ice shedding simulation module, ice shedding control module and data acquisition module. The ice shedding simulation module establishes the fundamental environment of the experiment, which can design according to different transmission line conditions. The ice shedding control module sets the time sequence of ice shedding, which can accurately simulate different ice shedding conditions according to the time sequence. The data acquisition module acquires the dynamic tension in real time, and adopts binocular stereo vision technology for the measurement of ice shedding jump track of the overhead conductor. The system has a higher lever of automation and a good control precision, which can effectively obtain the dynamic tension and ice shedding track during ice shedding.
overhead transmission lines; ice shedding; nonlinear simulation
国家电网公司科技项目(1216713041)
TM 75
A
1000-7229(2016)06-0109-07
10.3969/j.issn.1000-7229.2016.06.016
2016-02-16
王璋奇(1964),男,博士,教授,博士研究生导师,主要研究方向为输电线路工程,新能源技术与设备;
齐立忠(1968),男,博士,高级工程师,主要研究方向为输变电工程技术与管理;
王孟(1967),女,硕士,副教授,主要研究方向为输电线路工程;
王剑(1989),男,博士研究生,主要研究方向为输电线路状态监测与故障诊断技术。
