关于一种新型工业机器人各轴的连接点设计
2016-02-14朱集锦宁建强
朱集锦 徐 诚 宁建强
(广东科技学院 广东 东莞 523083)
关于一种新型工业机器人各轴的连接点设计
朱集锦 徐 诚 宁建强
(广东科技学院 广东 东莞 523083)
为了能对工业机器人的运动轨迹进行优化,进一步的缩短运动距离,能在最短的时间内将操作部分的机械手臂部分运动到工作的位置,采用了本设计,流行机器人一般采用类似人或动物的关节而进行设计,从而达到运动的目的。本设计采用摆锤直接进行运动的方式来达到大范围的移动,通过采用两个活动的轴从而可以很好的进行全方位的移动,作为一种探讨型的设计类型,运用此种设计能大大节省时间,并能节省材料,同时更好的实现高效控制的目的。
摆锤结合;全方位移动;机器轴连接
前言
在流行的工业机器人手臂中通常采用四轴或六轴来控制工业机器人的前后、左右、上下运动再配合速度从而实现各种运动,但有一个缺点,就是工业机器人进行曲线运动的时候消耗的时间比较长,采用直角边运动的方式会加大运动的路程,而且进行方向的改变会减小工业机器人的速度,在实际的生产中会导致产出产品的速度也减低。如果能进行曲线运动,或者空间中的对角运动,那么将大大缩短操作时间,同时在空间上也将更加节省空间,为达到实际生产的意义,通过本设计对轴的运动方向进行调整从而将从垂直和平移单纯的运动中解脱出来,达到曲线运动的目的。
问题分析:
直线运动是工业机器人的的基本运行方式,在空间对角运行中,通常采用的方式是沿立方体的两边运行到达对角,如图从A到B点,那么运行的轨迹就要走三条边,则比起直接从A到B的直线时间要长,而且走的轨迹距离也比较长,那么要提高速度,就要在运行轨迹进行改进。那么有没一种直接能运行的方法呢?

轴的设计解决的问题如下:
1)要求轴能够解决长距离的运行的问题。因为在运动过程中会出现一个缩短距离的问题,所以尽量缩短距离就能解决。
2)能解决准确到位的问题,这个问题关系到能否正确快速的解决物体的运行精度的问题,所以必须要求能很好的解决此问题。
3)能解决前进过程中稳定运行的问题,在前进过程中一旦出现有晃动的问题易不偏差。
基于此,设计的轴的图形如下:

1.机械部分组成
1)旋转台:通过旋转台可以在底座进行360的旋转从而确定操作的方向。
2)活动轴:通过活动轴可以确定工作的前方位置。
3)摆锤:通过摆锤所在的臂,采用摆锤电机可以直接快速的将工作手置甩到工作区附近。
4)工作手臂:工作时主要的工作动作机构。
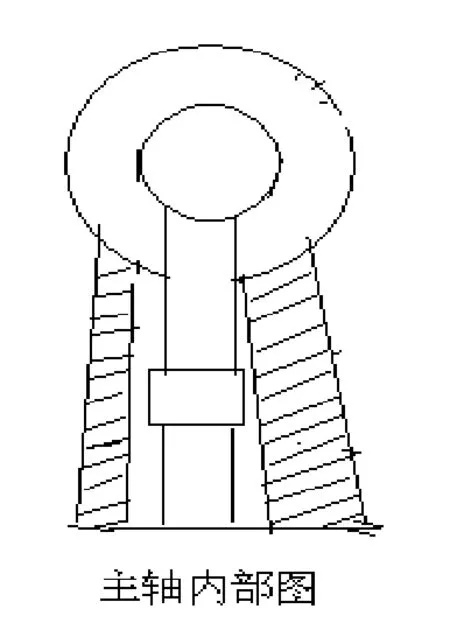
工作过程:先通过设定的程序通过电动机的驱动将主轴选择到相应的角度方向,然后通过对固定的主轴高度的调节,根据各个工作的需要可以多不同的高度进行设计,可以在主轴里嵌套一个可以移动的活动杆子,然后通过液压传动的方式进行高度调节如上面出显示的主轴内部图。可以充分的调节主轴的高度,从而能很快的达到理想的高度,然后采用摆锤电机对需要到达的对角位置进行抛送,当到达所需的位置时进行传感制动,利用内部的顶轴,对所到位置进行固定定位。
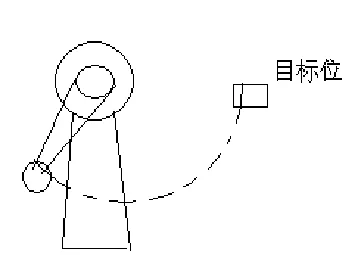
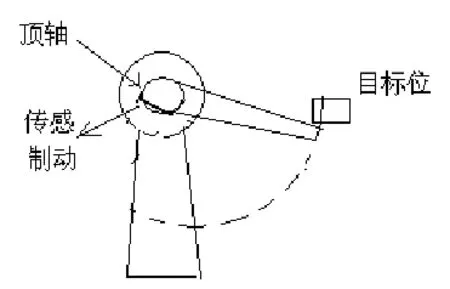
传感控制部分:采用对目标位的数据进行预先设定,当摆锤臂到达时则进行传感,采用红外传感技术对到达的位置进行感应,当摆锤到达时则进行数据的输出传送,接受的数据则进行最初的数据分析。
目标位缓冲:在目标位置进行弹簧缓冲,到摆锤到达位置时进行在轴连接部进行缓冲并锁定,然后进行加工。
摆锤臂:采用金属固件的方法进行,对方位的移动能达到迅速快速的移动。
摆锤电机:连接在轴的步进电机能很好的解决相关的位置精度问题。
2.电气部分组成:电机电路,传感器电路,液压控制的机械手部分
采用闭环控制,如图:
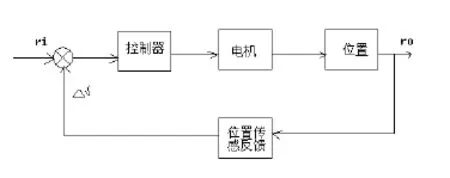
电机电路:旋转台和摆锤电机均采用旋转电机控制,通过对旋转台电机进行连接,对顶轴的的电机进行步进的脉冲精确控制从而能很快的进行定位,从而能尽快的让电机达到理想的位置。
液压气动控制机械部分:通过液压气动来对操作手部进行工作,或者夹紧或者旋转均可。
电气部分工作过程分析:通过设计的程序,采用传感装置对需到达的位置进行感应,从而将信号传回给控制系统,主控制系统根据所需的位置及所在的地址进行对电机的接通,从而通过对电机进行供电,让摆锤到达相应的位置,给对需进行加工的部件夹紧,驱动步进电机调试合适位置,最终达到良好的控制效果。
3.总结
本文通过对工业机器人中的传送过程中出现的距离从而导致效率低的问题进行分析,从问题的根源出发,对所在的问题进行最基本的分析,采用摆锤、步进电机的方法对角度和控制方向来进行一个比较准确的控制,在控制过程中,采用反馈的方式对已经存在的系统进行进一步的取样、比较、放大等环节从而能更好的把握好位置的控制,大大缩短了之间的效率问题。为解决工业机器人的距离传输问题提供了一种比较良好的解决方法。
[1]孙英飞.我国工业机器人发展研究.罗爱华.科学技术与工程.2012-04
[2]刘海涛.工业机器人的高速高精度控制方法研究.华南理工大学,2012-03.
[3]施文龙.六轴工业机器人控制系统的研究与实现.武汉科技大学 .2015-05.
On a new type of industrial robots each connection design of shaft
ZHU Ji-jin, XU Cheng, NING Jian-qiang. Guangdong Institute of Science and Technology, Guangdong Province, Dongguan 523083, China
In order to optimize the trajectory of the industrial robot, further shortening the distance between sports, can in the shortest possible time will be part of the operation of mechanical arm part of the movement to the working position, adopted this design. Popular robot joints of the general use similar people or animals design, so as to achieve the goal of sports. This design adopts the pendulum directly exercise way to achieve a wide range of movement, through the adoption of the axis of the two activities can carry on the omni-directional mobile is very good, as a type of type design, use of this kind of design can greatly save time, and can save material, at the same time, better achieve the goal of effective control.
Pendulum; The omni-directional mobile; Machine shaft connection
TP242
A
1009-5624-(2016)03-0027-03
