雷达天线翻转架车方案设计及研究
2016-02-13胡欣源刘圣强
胡欣源刘圣强
(1.华北水利水电大学机械学院,河南郑州 450011;2.中国船舶重工集团第七一三研究所,河南郑州 450000)
雷达天线翻转架车方案设计及研究
胡欣源1刘圣强2
(1.华北水利水电大学机械学院,河南郑州 450011;2.中国船舶重工集团第七一三研究所,河南郑州 450000)
为了实现雷达天线对不同目标的观测,设计一套翻转架车结构,即采用电动缸作为动力来源的四杆机构来实现雷达天线0°~90°的翻转。方案一中雷达重心位置相对于铰链偏心安装,在翻转过程中重心会由一侧到另一侧;方案二中重心位置在翻转过程中始终位于同一侧。通过对该结构进行简化,得到其数学模型和目标函数,运用MATLAB函数进行铰点的优化,最终得到一组最优铰点,使电动缸的长度最短、推力最小,通过优化设计既减小了装置尺寸,又降低了对电动缸的配置要求。
翻转机构;回转机构;MATLAB分析;机构设计
天线是收发无线电信号的重要设备,其可以将导行波和电磁波相互转换。天线正常工作时需要朝着一个方位收发信号,在利用天线进行信号传输和转换的过程中,天线座架的作用就要能够带动天线翻转,并且将天线调整到一个合适的角度,因此对于这个调整的角度,不仅要调节范围大,而且要调节角度误差小,在达到特定位置之后,架台必须要锁定在该位置上,不可松动或移位,以免影响天线收发信号的效果。在国内,天线架台对于角度的调整都有一定的局限,并且现在的大部分架台都是固定在一个地点,不能够灵活地移动,因而不能够在一些复杂条件下收发信号。本文针对翻转架车的设计和分析进行综述[1,2]。
1 翻转机构设计思想
方案一的结构图如图1(a)所示,天线1固定在翻板上,翻板与立柱相铰接。2为电动缸,通过电控设备可以进行伸长和缩短,使翻板可以进行竖直到水平的0°~90°旋转,使得天线的方向得到调节。整个机构为双摇杆机构,原动件数为1,活动杆件数为3,转动副为3,移动副为1,所以机构的自由度为F=3×3-2×(3+1)=1,自由度数等于原动件数,此机构具有确切的运动。同理,方案二的结构图如图1(b)所示,在电动缸的驱动下,翻板能够在竖直到水平面90°范围内自由转动,机构的自由度数为1,机构具有确切的运动[3]。
图1方案结构图
2 对两种方案的优化
2.1 对方案一进行优化求解
方案一的结构简图如图2所示,假设A点和D点在同一水平面上,另图中|AD|=l1,|BC|=l2,|BE|=l3,|CD|=l4,则:
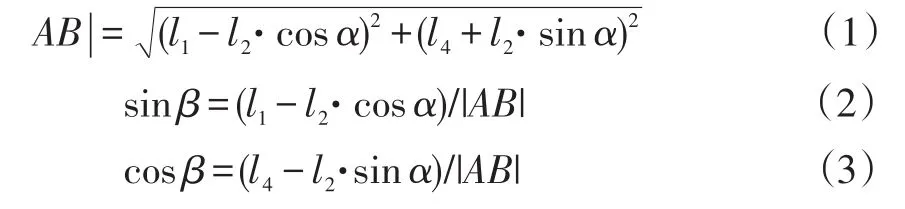
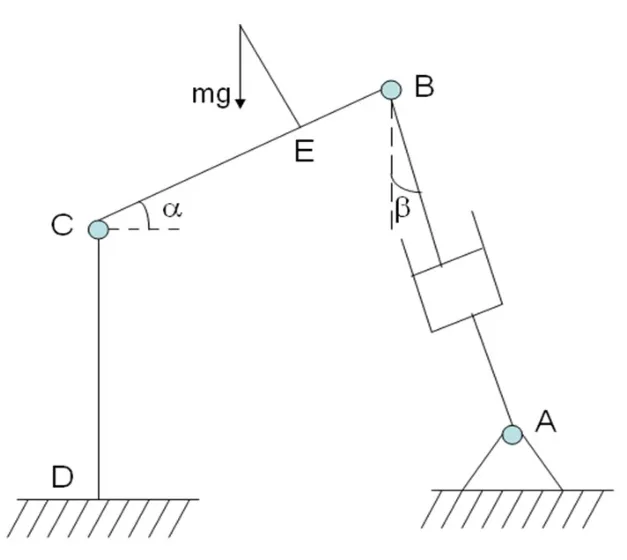
图2 方案一结构简图
2.1.1 对方案一进行受力分析。受力模型如图3所示,取C点为分析点,以BC杆为分析对象,列平衡方程如下:

2.1.2 优化模型
2.1.2.1优化设计目标函数。根据式(1)~(6),得出:

则以所受负载的绝对值最小为优化目标,即FAB的二次幂为优化目标[4]。
2.1.2.2设计变量。从图2原理简图中可知,以D点为固定点,若l1、l2、l3、l4和角度a确定,则铰点A、B、C、E的位置则固定。在天线翻转过程中,角a从0°到90°或者90°到0°变化,不能作为设计变量,以l1、l2、l3、l4为优化变量。则其向量表达式为:x=[l1,l2,l3]T=[x1,x2,x3]T。
2.1.2.3优化约束条件的确定
①边界条件。|AD|=l1,0.5≤l1≤1.5;|BC|=l2,0.5≤l2≤1;|BE|=l3,0≤l3≤0.7;|CD|=l4,0.5≤l4≤1.5。以上单位均为m。
②约束条件。根据设计经验及寻优范围的减小,天线的中心在BC杆上的投影点E应处于BC之间,则要求:
软件部分主要包括光纤连接信息采集、智能光纤托盘与单元控制器的485数据传输、485数据到蓝牙数据的转换以及手机端APP设计等。本文重点对光纤连接信息采集进行介绍。
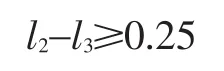
当天线翻转到90°时,天线大口径与地面应有一定的安全距离,大口径半径为0.75m,翻转到90°时天线不可以触及到地面,则要求:

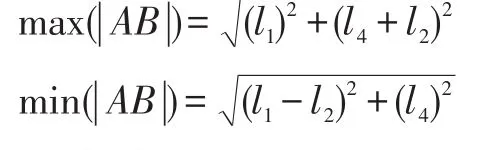
根据设计结构与控制方案设计的要求,本方案选用电缸为驱动,则要求电缸最长小于电缸最短的2倍,即:max(|AB|)-2×min(|AB|)≤0。
根据分析可知,在天线翻转为90°时缸伸长最大,在天线翻转为0°时缸伸长最小,则:
2.1.3 设计和仿真。本次优化的变量是l1、l2、l3、l4,由于a的变化会影响优化变量的值。通过MATLAB中的一个循环语句来筛选出优化变量在不同取值时力最大的一个a值,再在此时确定的a角度的情况下,对4个优化变量用求解非线性多元函数最小值的matlab函数fmincon语句进行优化。通过优化可知,在a为0°时F最大,结果如表1所示[5]。
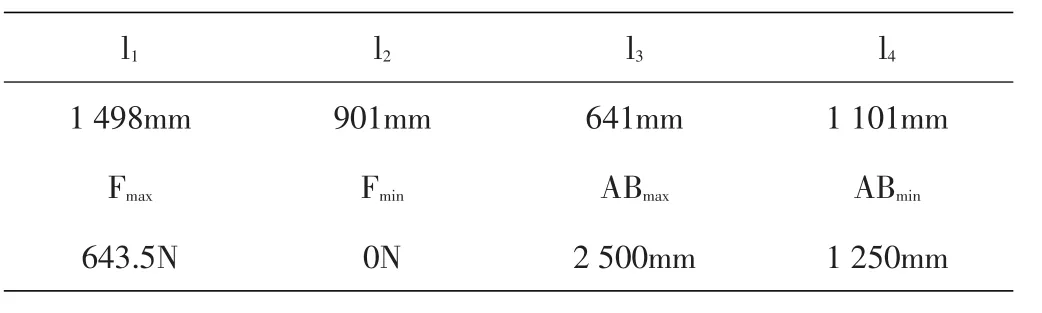
表1 方案一优化分析结果
由图4可知,力在角度a=0°时为最大643.5N,随着a的增大逐渐缩小为0,然后方向改变继续增大,最后在a= 90°时变为-544.8N。

图4 方案一力随角度变化
由图5可知,在a=0度时电动缸的长度最短为1 250mm,随着a的角度逐渐增大,电动缸的长度也逐渐增加,最后在a=90°时,电动缸最长为2 500mm,电动缸的行程为1 250mm。

图5 方案一缸长度随角度变化
2.2 对方案二进行优化求解
方案二的结构简图如图6所示,假设A点和D点在同一水平面上,图中|AD|=l1;|BC|=l2;|CD|=l3,CB与天线底边的夹角为γ。考虑到A点可能在D点右侧也可能在D点的左侧,所以设A点在D点右侧时为正值,在D点左侧时为负值,则:
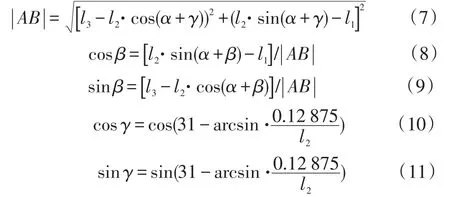
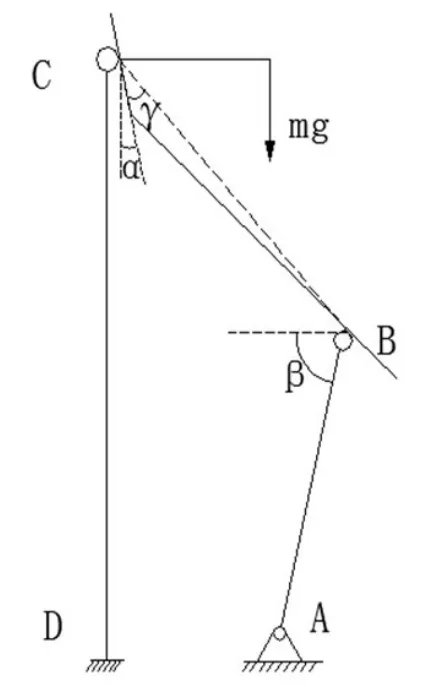
图6 方案二结构简图
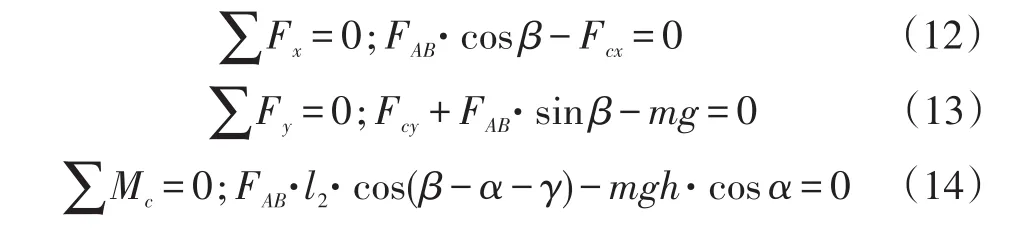
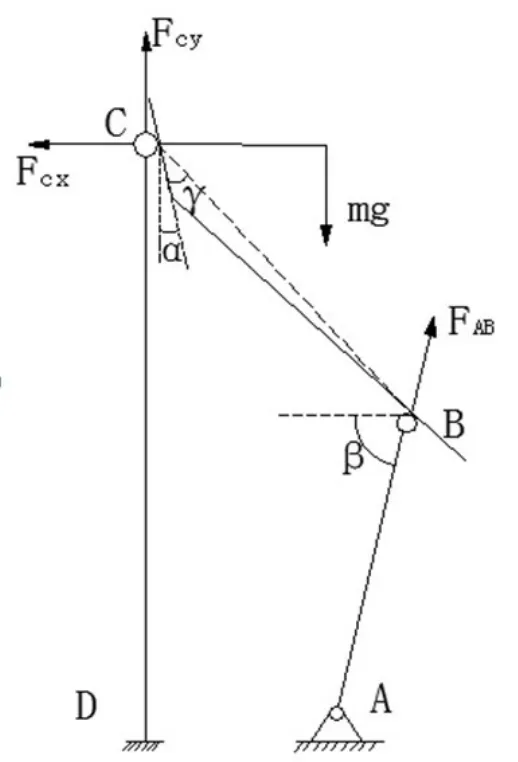
图7 方案二受力分析
2.2.2 优化模型
2.2.2.1优化设计目标函数。根据式(7)~(14)得出:
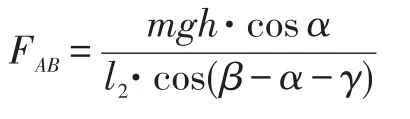
则以所受负载的绝对值最小为优化目标,即FAB的二次幂为优化目标。
2.2.2.2设计变量。从图6原理简图中可知,在天线翻转过程中,角a从0°到90°或者90°到0°变化,不能作为设计变量,以l1、l2、l3为优化变量,则其向量表达式为:x=[l1,l2,l3]T=[x1,x2,x3]T。
2.2.2.3优化约束条件的确定
①边界条件。|AD|=l1,-0.75≤l1≤0.3;|BC|=l2,0.25≤l2≤0.8;|CD|=l3,0.75≤l3≤1.5。单位均为m。
②约束条件。根据设计要求,本方案选用电缸驱动,则电缸最长小于电缸最短的2倍,即:max(|AB|)-2×min(要(|AB|)≤0。
根据分析可知,在天线翻转为90分时缸伸长最大,在天线翻转为0°时缸伸长最小,则:

2.2.3 设计仿真。通过优化分析得出结果如表2所示[7]。

表2 方案二优化分析结果
由图8力随角度变化知,力在角度a=0°时为最大294N,随着a的增大逐渐缩小最后在翻转角度a增加至90°时电动缸的负载力变为0。
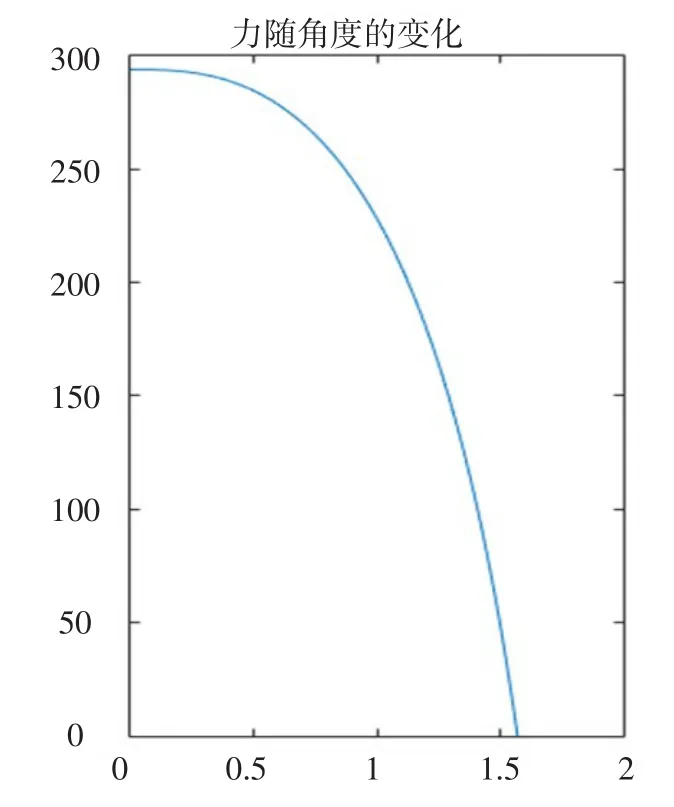
图8 方案二力随角度变化
由图9可知,在a=0°时电动缸的长度最短为908mm,随着a的角度逐渐增大,电动缸的长度也逐渐增加,最后在a=90°时,电动缸最长为1 662mm,电动缸的行程为754mm。
3 方案的对比选择
3.1 仪器翻转架在翻转过程中电动缸的负载力
在方案一天线翻转过程中,电动缸承受拉压两种状态的力。当a=0°时,电动缸承受一个最大的压力为643.5N;当a=90°时,电动缸承受一个最大拉力为544.8N。方案二中电动缸在天线翻转的过程中只是受到一个压力,天线对电动缸的压力在翻转角度为a=0°是为最大值294N。在天线翻转过程电动缸负载力这一因素中,方案二更为合理。
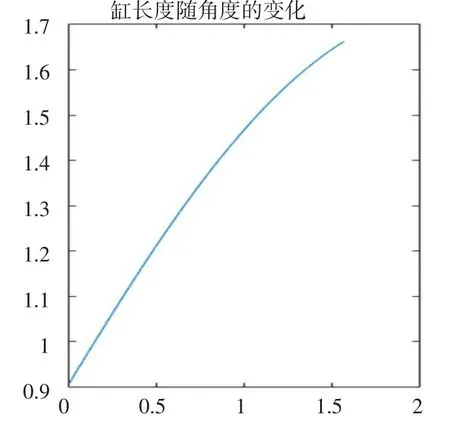
图9 方案二缸长度随角度变化
3.2 电动缸底部位置与一级支撑臂之间的距离
方案一的电动缸底端与一级支撑臂的距离为1 498mm。方案二中,电动缸和一级支撑臂的距离为650mm。从设计稳定性上,选择方案二。
4 结论
仪器翻转架车是天线及雷达装置的重要组成部分。本次设计首先通过提出2种不同的设计方案,然后通过MATLAB软件对其进行优化分析,进行结果处理,通过对比确定其中的一种更为合理的设计方案。该方案设计主要分为翻转机构的设计和回转机构的设计,设计结果符合方案要求。本文的设计思路为具有相似结构的仪器翻转架车的设计和分析提供了参考方法和理论依据。
[1]文航凌.某新型天线翻转机构的设计及优化[D].成都:电子科技大学,2013.
[2]刘晓.垂直式垃圾转运车翻转机构的设计与分析[D].大连:大连交通大学,2013.
[3]王虎,严诺,王磊.一种雷达天线翻转机构的设计[J].机械制造与自动化,2015(1):45-47.
[4]张增太,房景仕.某雷达天线举升翻转机构的设计[J].雷达科学与技术,2009(4):312-315.
[5]张瑞珏,赵克俊,郑建超,等.某机动式雷达天线的结构设计[J].科技创新与应用,2015(11):51.
[6]戎建丰,戎宏飞.天线支架的结构设计与分析[J].无线电工程,2012(8):54-58.
[7]杨世文,许小健.MATLAB优化工具箱在结构优化设计中的应用[J].科学技术与工程,2008(5):1347-1349.
Scheme Design and Research of the Radar Antenna Turning Frame Vehicle
Hu Xinyuan1Liu Shengqiang2
(1.Mechanics Institute,North China University of Water Resources and Electric Power,Zhengzhou Henan 450011;2.713 Research Institute of China Shipbuilding Industry Corporation,Zhengzhou Henan 450000)
In order to observe the different targets of radar antenna,this paper designed a set of turnover frame vehi⁃cle structure,that is to use the electric cylinder as the power source of the four bar mechanism to achieve the the ra⁃dar antenna from 0 degrees to 90 degrees flip.Scheme one,the radar center of gravity position relative to the hinge ec⁃centric installation,the center of gravity would be from one side to the other side during the turning process;Scheme two,the center of gravity position was always on the same side during the turning process.The structure was simpli⁃fied,the mathematical model and objective function were obtained,and the optimization of the hinge point was ob⁃tained by using the MATLAB function.The length of the electric cylinder was the shortest and the thrust was mini⁃mum.By optimizing the design,the size of the device was reduced,and the requirement of the configuration of the electric cylinder was reduced.
tilting mechanism;slewing mechanism;MATLAB analysis;mechanism design
G356.6
A
1003-5168(2016)12-0100-04
2016-11-08
河南省科技攻关项目(132102210096)。
胡欣源(1989-),男,硕士,研究方向:机械工程。
