船舶螺旋桨推进形式研究
2016-02-09李闯,李志
李 闯,李 志
(1. 海军驻武汉712所军事代表室,武汉 430064;2. 海军驻广州427厂军事代表室,广州510715)
船舶螺旋桨推进形式研究
李 闯1,李 志2
(1. 海军驻武汉712所军事代表室,武汉 430064;2. 海军驻广州427厂军事代表室,广州510715)
针对采用螺旋桨推进的船舶,对船舶各种典型的螺旋桨推进系统的工作原理、机桨特性和适应范围,以及操控系统的特点进行了分析比较。
电力推进 螺旋桨 特征分析 控制模式
0 引言
螺旋桨推进目前是船舶推进的主要形式。随着船舶动力装置的大型化、自动化、复杂化程度的提高,对船舶推进装置的性能提出了更高的要求[1]。首先,基于节能和减排的考虑,船舶营运者要求提高推进性能,进而提高船舶的经济性能;其次,一些工程船舶、科考船、军舰等特种船舶,为能适应复杂环境下的工况变化和高机动性能、良好操纵性能的要求,也对船舶推进形式提出了更高的要求。
本文对目前船舶各种典型的螺旋桨推进形式的工作原理、机桨特性和适应范围,以及操控系统的特点进行了分析比较。针对调速电机和可调距螺旋桨的推进形式的机桨特性进行了重点分析,总结其具备经济性好、工况适应性好等优点,在拖网渔船、物探科考船、挖泥船等工程船舶上具有良好的应用前景。
1 船舶螺旋桨推进形式
对于采用螺旋桨推进方式的船舶,根据调速方法的不同,主要分为:
1)柴油机-定距螺旋桨推进;
2)柴油机-可调距螺旋桨推进;
3)电动机-定距螺旋桨推进;
4)电动机-可调距螺旋桨推进。
柴油机-定距螺旋桨推进应用广泛,但其调速性能较差,在柴油机直接推进系统中,为了改善调速性能常采用可调距螺旋桨,它将定螺距调速变推力改成定速螺旋桨调螺距变推力,可弥补柴油机调速范围有限的缺点;电力推进系统中,由于电动机可无级调速且在低速时可产生较大转矩,即小功率大转矩性能,更优于可调距螺旋桨的性能,因此现代船舶电力推进一般都采用调速电动机驱动定距螺旋桨的调速方式;在一些特殊应用的工程船舶中,亦有采用调速电动机驱动可调距螺旋桨的推进型式。
1.1 柴油机-定距螺旋桨推进
柴油机-定距螺旋桨推进的结构图如图1所示,主机为中高速柴油机或者低速柴油机,其中中高速柴油机需要经过齿轮箱减速,主机带动轴系驱动定距螺旋桨转动,从而产生推力使船体克服水阻力前进。该推进形式是当今民船上最通用的推进装置形式。
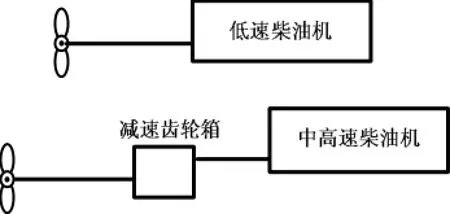
图1 柴油机-定距螺旋桨推进结构
柴油机-定距螺旋桨推进机桨特性曲线如图2所示,图中,曲线1是按照柴油主机额定功率和额定转速设计的螺旋桨转矩特性和功率特性。曲线2是超载工况下的螺旋桨特性,曲线3是轻载工况下的螺旋桨特性,曲线4是柴油主机的特征曲线。

图2 柴油机-定距螺旋桨推进机桨特性曲线
由图2可知:当船舶在设计的满载工况下航行时,柴油主机运行在额定转速和额定转矩状态下,能够发出额定功率,船舶到达额定航速,如图中的工作点A;当船舶在超载工况下航行时,柴油主机达不到额定转速和额定转矩,因此无法输出额定功率,如图中的工作点B;当船舶在轻载工况下航行时,由于受到柴油主机额定转速的限制,达不到额定转矩,因此也无法输出额定功率,如图中的工作点C。综上所述,采用柴油机-定距螺旋桨的推进形式,在偏离设计工况时,都不能发出柴油主机的全部额定功率。
柴油机-定距螺旋桨推进的优点是结构简单、成本低,管理、维护方便,在设计工况下效率高。其缺点是当处于非设计工况时,系统效率低,油耗高。
1.2 柴油机-可调距螺旋桨推进
柴油机-可调距螺旋桨推进的结构图如图3所示,可调距螺旋桨即是桨叶螺旋面与桨毂可作相对转动的一种螺旋桨。它借助一套转叶机转动桨叶以达到改变螺旋桨螺距的目的。桨叶每转动到一个位置,都有一个对应的螺距。在螺距调节过程中,每一个螺距变换相当于更换了一只螺旋桨,不同的螺旋桨有着各自不同的特征曲线。船舶推进系统可通过对螺旋的变化,以适应各种航行状态对螺旋桨工况的不同要求,从而使各种航行工况都趋于最佳的运行状态,获得更好的经济性。
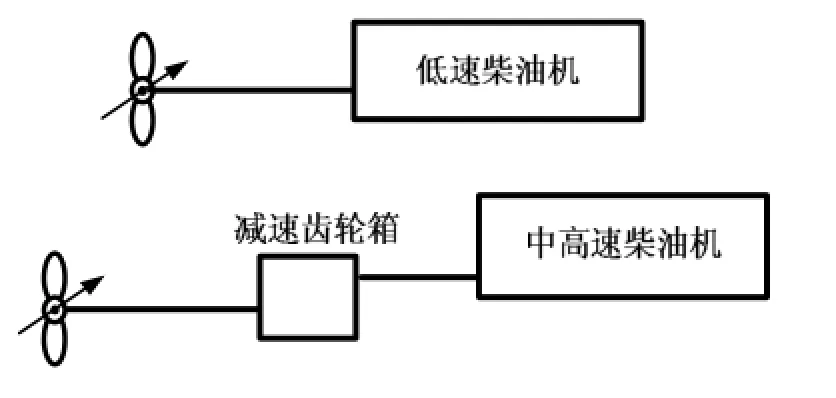
图3 柴油机-可调距螺旋桨推进结构
柴油机-可调距螺旋桨推进螺旋桨特性曲线如图4所示,表示在相同的航行条件情况下转矩、螺距、功率以及航速之间的关系。曲线1~8是一组不同螺距情况下(从大到小)的螺旋桨特征曲线,A~E是一组不同航速情况下螺旋桨速度特征曲线。
由图4可知:在螺距不变的情况下,增加转速会使柴油主机功率增加,同时提高了航速;在柴油主机转速不变的情况下,增加螺距会使柴油主机功率增加,同时提高了航速;若要求航速保持不变,加大螺距会要求转速降低,减小螺距会要求转速增加,柴油主机功率根据螺旋桨螺距和转速而定,存在最小功率的情况,此时柴油机输出功率最小,同时也存在最佳燃油消耗率的情况,此时柴油机的燃油消耗率最低。
根据可调距螺旋桨的特征曲线可知,可调距螺旋桨的有如下特征:
1)船舶在任何工况下均能吸收主机的全功率,只要外界条件不变,配合一定的螺距比,即能使主机始终运转在额定功率下,最大限度利用柴油主机的输出功率,从而具备节能效果。
2)用不同的转速和螺距比相配合,可得到所需的推力,进而可得到所需的船舶航速。可调距螺旋桨能在柴油主机上限曲线、最大转速线和最低稳定转速范围的区域内任何一点上工作[2]。可见,其工作范围很大,在该区域内任意搭配转速和螺距比都能得到给定的航速。而且在低航速情况下,存在最小输出功率点和最佳燃油消耗率点,可进行船舶推进系统节能优化。
3)当桨叶放在零螺距位置时,可调距螺旋桨推力为零,主机仍以一定的转速运转,而船舶在原地不动;桨叶转到负螺距位置时,可使主机转向不变而实现倒车。

图4 可调距螺旋桨特性曲线
可调距螺旋桨的优点如下:
1)船舶航速能适应船舶阻力的变化,充分利用主机功率,部分负荷下的经济性好。在非设计工况下,可调距螺旋桨效率要比定距螺旋桨的高。对于不能总是运行在设计工况下的船舶而言,采用可调距螺旋桨作为推进器是一种较为经济的方案。
2)提高了船舶的机动性和操纵性。船舶航速可通过主机转速和螺距两个参数的调节来完成船舶的前进、后退。
3)延长了主机寿命。安装可调距螺旋桨的船舶,主机转速可以固定在最适当的位置而不改变,减少了主机起、停次数,减少了运动部件的磨损及受热部件的热疲劳损坏。全机无需设换向装置,机构简化。使发动机的寿命得到延长。
4)有利于推进装置驱动辅助负载。采用可调距螺旋桨的船舶可以通过调节螺距进行无级调速,船舶航行时主机可以恒速运转,这样有利于主机驱动轴带负荷如轴带发电机等。
5)便于实现遥控。柴油机的起动遥控机构比可调距螺旋桨机构的转速遥控和螺距遥控部分要复杂得多,而可调距螺旋桨可在柴油机不停机的情况下进行各种调整,因此船舶操纵系统在采用可调距螺旋桨时更容易实现集控和遥控。对于多桨船舶,由驾驶台直接操纵螺距,不仅可以达到各桨动作的同步,更提高了机动性能。
可调距螺旋桨的缺点如下:
1)采用可调距螺旋桨的船舶轴系较为复杂,且螺旋桨本体所用材料较好,制造工艺要求高,因此造价和初装费用较高。而且由于桨縠中转叶机构的零件较多且精密,因此可靠性不如定距螺旋桨,维修保养成本较高[3]。
2)毂径比较大,且因配合叶片转动需要,桨毂不易制成光顺的流线型,故在设计情况下,其效率较定距螺旋桨约低3%~4%。
3)因叶片转动及保证强度的需要,叶根部分切面的厚度比较大,桨叶根部易发生空泡。
1.3 电动机-定距螺旋桨推进
电动机-定距螺旋桨推进的结构图如图5所示,主机为中高速推进电动机或者低速推进电动机,其中中高速推进电动机需要经过齿轮箱减速。推进电动机由变频调速装置驱动,可实现无极调速。该推进形式为电力推进,由于电动机在低速时可产生较大转矩等突出的优点在现代船舶中运用越来越广泛。
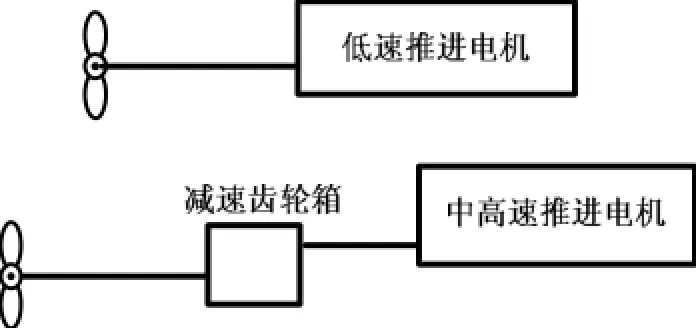
图5 电动机-定距螺旋桨推进结构
电动机-定距螺旋桨推进机桨特性曲线如图6所示,图中,曲线1是按照推进电动机额定功率和额定转速设计的螺旋桨转矩特性和功率特性。曲线2是超载工况下的螺旋桨特性,曲线3是轻载工况下的螺旋桨特性,曲线4是推进电动机的特征曲线。
由图6可知:推进电动机在额定转速以内具备恒转矩特性,与图2相比,在超载工况下,可输出更大的功率。另外,推进电动机在额定转速以上存在一定的超速区域,超速区内输出功率恒定,保证推进电动机的全功率输出,可提高船舶的最大航速。

图6 电动机-定距螺旋桨推进机桨特性曲线
电动机-定距螺旋桨推进的优点如下:
1)舒适、安静。采用电力推进形式后,推进电机安装在船体底部,由于推进电机转矩平稳,振动噪声远小于推进柴油机,可大大降低船舶动力装置及螺旋桨的噪声,进而提高船舶的舒适性。
2)经济性好。电力推进配置有多台柴油发电机组用于发电,可根据用电负荷选择投入运行的发电机组台数,使运行机组始终运行于高效工作区,保持燃油消耗率最低,实现最大的经济性,提高续航力,降低运行成本。
3)操纵性好。推进电机的转速易于调节,在正反转各种转速下都能提供恒定的转矩,因此能得到最佳的工作特性。电力推进的调速和倒车等主要由电气控制实现,因而具有良好的机动性和优良的操作性。
4)安全性高、可靠性高、维修性好。电力推进使用多台柴油发电机组,个别机组的故障只对船速有一定的影响,不会导致丧失动力。在有更高要求的情况下,可通过变频器的模块化和推进电动机的多绕组形式,达到更高的可靠性。传统的直接推进装置的原动机经常处于变速工况运行,磨损大、需要定期的进行保养和维护。电力推进装置的原动机长期定速运行,磨损小;同时电动机、变频器、动力电池不需要日常的维护,因此采用电力推进装置的后期维护工作量以及成本也将大大改善。
5)节能环保。当柴油机推进在低速低负荷工作时,滞燃期变长,NOx排放量会急剧增加,难以满足规定的要求。而采用电力推进更有利于船舶控制环境污染。对同一功率船舶而言,采用电力推进,由于原动机可以采用多台柴油发电机组的配置,电力推进中的中速柴油机可以始终在最佳工作区工作,燃油的喷射及燃烧质量好,燃烧产物中NOx的含量少,有利于实现节能减排。
6)节省空间。柴油机直接推进船舶的轴系长度往往占到船长的40%左右,采用电力推进的船舶省却了传动轴系、代之以电缆。电力推进布置灵活,改善了机舱布置,使动力装置各种设备的安排更加合理,节省了大量空间。
7)适应船舶自动化的发展趋势。电力推进的集中操纵方便地实现了远距离电控,同时还能方便地提供与船舶其他系统(如动力定位系统、全船监测报警系统等)的接口。
电动机-定距螺旋桨推进的缺点如下:
1)电力推进装置的初始投资成本高。
2)对于一直运行在全额定航速的船舶而言,如货船,其整体能量效率较低。
3)采用电气设备可能引来一些需防避的附加危害,如电气设备中可能的火灾,水引起的扰乱(闪络、短路和接地)、电击造成的人身伤害等等。
4)电力推进装置需要受过较好训练且具有较高技能的操作人员。
5)船舶制动时,为消耗制动能量,需要配置制动回路和制动电阻。
1.4 电动机-可调距螺旋桨推进
电动机-可调距螺旋桨推进的结构图如图7所示,主机为中高速推进电动机或者低速推进电动机,其中中高速推进电动机需要经过齿轮箱减速。螺旋桨的转速和螺距均可以无极调节。电动机-可调距螺旋桨推进即可发挥电力推进系统的优势,又有可调螺旋桨的优势,适应于航程较远且具有多种运行工况的船舶,在物探船、挖泥船、拖网渔船等具有较大的应用前景。
以物探船为例,其利用地震勘探技术从事调查作业[4]。作业时需要在尾部拖带扩展器、枪阵、电缆等水下设备。其主要运行工况为物探作业和航行工况。

图7 电动机-可调距螺旋桨推进结构
对于物探作业工况,其主要运行特点是:
1)低航速大拖力。物探船在拖航作业工况时,需保持正确的航向及5 kn稳定航速。如航速太快,拖带的电缆张力超限,容易将电缆拉断。
2)拖力可变。物探船在拖航作业工况时,拖带的电缆数量和长度以及其与之相匹配的枪阵排数、震源容量会不相同。例如一艘12缆物探船,最大拖带12根电缆,根据不同工作水域海况特性,它有时仅拖8缆、6缆不等。
根据物探船的作业工况,若采取电动机-定距螺旋桨的推进形式,为满足航行以及物探作业的需求,螺旋桨的额定工作点设置困难,难以实现推进系统的优化运行和经济效益。而采用电动机-可调螺距桨的推进形式,可通过速度和螺距的调节兼顾低航速大拖力运行工况、推进效率的优化以及系统经济性。
作业工况下,螺旋桨需要提供一定的作业推力,当作业推力较小时,不同螺距角下螺旋桨的工作点均位于推进电机额定转矩以下,如图8中的D1和D2点。当由于作业区风浪的影响或者作业过程中需要增大螺旋桨推力的情况下,可能会出现螺旋桨的负载转矩超过推进电机的额定转矩,如图8中的E1点。但如果减小螺距角,在相同的推力要求下,螺旋桨负载转矩小于推进电机的额定转矩,如图8中的E2点。
通过上述分析可知,对于存在航行过程中需要提供一定作业工况推力的物探船而言,变螺距螺旋桨是有必要的,通过螺距和转速的联合调节,不仅能够使得螺旋桨的推力效率优化,而且在作业工况下,能够适应各种环境的变化和具备处理应急事情的能力。
2 船舶推进操控系统
针对不同的船舶推进形式,其操控系统的控制模式不同,对于定距螺旋桨,主要通过调节柴油主机或者推进电动机的转速实现对螺旋桨速度控制,其控制特性基本上是线性的,不同的是推进电动机的调节范围较宽,理论上是从0~100%额定速度,且具备一定的超速能力,柴油主机的调速范围从最低稳定转速范围到额定速度。而采用可调距螺旋的推进形式,其操控系统的控制模式主要有以下几种:
1)定速控制模式
在该模式下,柴油主机或推进电动机的转速设定值维持不变,操纵手柄仅仅控制螺旋桨的螺距。通过改变螺距来改变航速、实现前进和倒航之间的转换。
2)组合控制模式
在该模式下,控制台上的操纵杆既控制柴油主机或推进电动机的转速同时也控制螺旋桨的螺距。柴油主机的转速和螺距的设定值如图9所示的曲线进行设定。推进电动机的转速和螺距的设定值如图10所示的曲线进行设定,速度设置依靠速度控制手柄,速度值将会在计算后直接发送至推进变频器进行速度控制。速度输出的变化率可在推进变频器中进行设置。
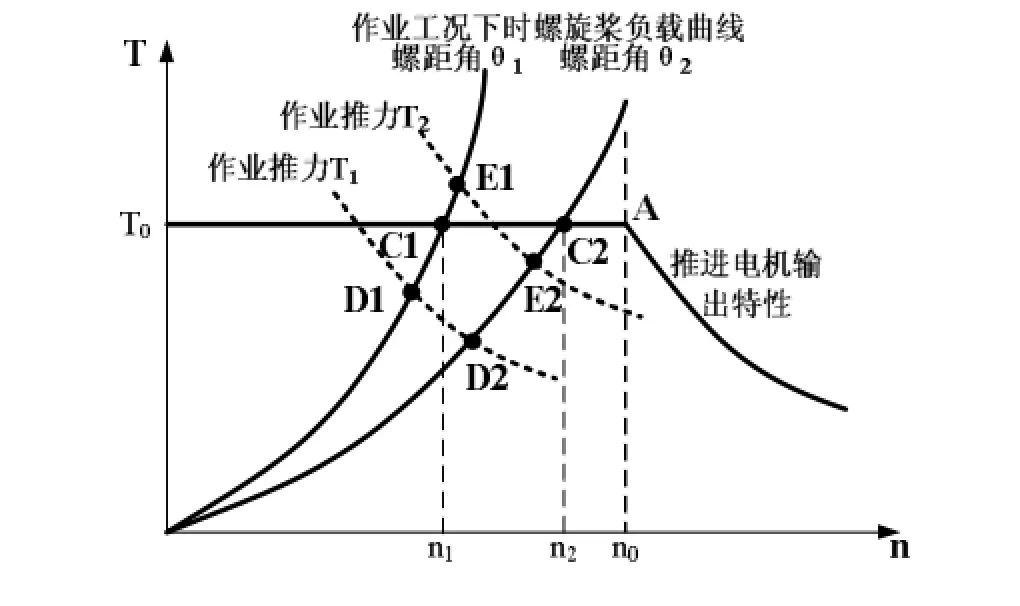
图8 不同螺距角的螺旋桨负载曲线
3)独立控制模式
在该模式下,柴油主机或推进电动机的转速和螺距通过各自的操纵手柄分别进行独立的控制。虽然其控制系统比较简单,但要求驾驶台操纵人员非常了解螺旋桨的性能。因而操纵比较复杂。
4)非跟踪控制模式
该模式应急操作时的控制方式。当螺距控制系统出现故障时,而电源和螺距液压驱动系统仍能正常工作,可利用驾驶台上的应急操纵按钮通过这种控制模式直接控制可调距螺旋桨的螺距;或者是将可调距螺旋桨的螺距固定在正车某一位置,将它作为定距桨来使用。该模式通常作为上面其它控制模式的备用控制方式。
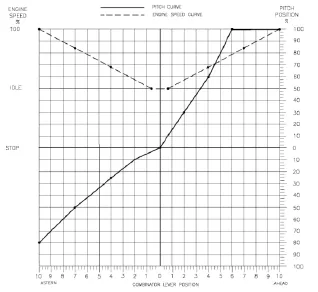
图9 组合控制模式下柴油主机转速和螺距的配合曲线
3 结论
通过对各种典型的螺旋桨推进形式的工作原理、机桨特性、优缺点的比较分析,可针对相应的船舶运行要求进行选取。通过对调速电机和可调距螺旋桨的推进形式的机桨特性的分析,该推进形式适应于低航速下大推力运行工况的工程船舶,在物探船、挖泥船、拖网渔船中具有较好的应用前景。
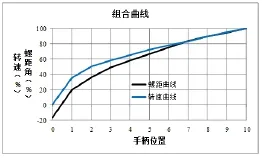
图10 组合控制模式下推进电机转速和螺距的配合曲线
[1] 梁赞通. 调距桨推进装置机桨优化匹配研究 [D]:[硕士学位论文]. 大连: 大连海事大学, 2009.6.
[2] 黄振华, 李霏, 唐然等. 船舶不同航行工况下船机桨配合特性分析[J]. 船舶标准化工程师, 2015.6.
[3] 庞涛, 何祖军, 孙明平. 可调螺距螺旋桨推进特性分析及控制系统研究[J]. 计算机测量与控制, 2006, 14 (2).
[4] 王波, 饶广龙, 李铭, 贾旭东. 高性能物探船推进动力系统配置分析[J]. 船舶, 2016.
图4 以太网数据接收结果
4 结束语
本文在分析CAN总线、以太网通信要求及协议的基础上,提出了从CAN数据帧到以太网的转换的方案。针对设计需求,选用了TMS570作为通信模块的MCU,该芯片具备较高的安全性及可靠性,并根据设计完成了通信模块制作。最后对通信模块底层驱动及应用层软件进行了设计,成功实现数据通过一路CAN向双冗余CAN和以太网转发。
参考文献:
[1] 狄仪伟. 面向未来智能电网的智能调度研究[D]. 山东大学硕士学位论文, 2010.
[2] 胡学浩. 智能电网——未来电网的发展态势[J]. 电网技术, 2009, 33(14): 1-5.
[3] 董小瑞, 乔琨. 中国智能电网发展模式及关键技术[J]. 电力学报, 2010, 25(4): 287-291.
[4] 刘坤明. 基于TMS570的CAN通信接口板设计[D].北京交通大学, 2012.
Reviews on the Ship’s Propeller Form with the Propeller
Li Chuang1, Li Zhi2
(1. Naval Representatives Office in 712 Research Institute, Wuhan 430064, China; 2. Naval Representatives Office in No.427 Factory, Guangzhou 510715, China)
For the ship configured with the propeller, the working principle, propeller characteristics and adaptability of the propeller propulsion system and the characteristics of the control system are analyzed and compared in this paper.
electric propulsion; propeller; characteristic analysis; control mode
U664.33
A
1003-4862(2016)12-0068-06
2016-08-19
李闯(1977-)男,硕士,工程师,。研究方向:舰船电气。
