一种开关电源环路补偿的工程设计方法
2016-02-07刘丽媗刘金海
刘丽媗, 刘金海
(闽南师范大学 物理与信息工程学院, 福建 漳州 363100)
一种开关电源环路补偿的工程设计方法
刘丽媗, 刘金海*
(闽南师范大学 物理与信息工程学院, 福建 漳州 363100)
针对开关电源环路设计中功率变换器建模的复杂性,提出了一种基于Saber时域系统分析工具Tdsa的开关电源环路补偿工程设计方法.利用Saber进行瞬态分析和扫频分析,获得开环系统的频域特性,结合开关电源补偿后的预期性能,设计环路补偿器.最后,以一个设计实例阐述了本方法的具体实现,补偿后的开关电源系统的性能相较于补偿前得到了较大改善,验证了本方法的可行性.
环路补偿;Saber;Tdsa;PID调节器
环路补偿设计对于一个开关电源的工作是至关重要的,直接影响到电源的性能[1].开关电源的环路补偿设计,一般有时域模型计算法和时域试探法以及以上方法的综合[2].时域模型计算法先计算出功率变换器精确时域模型,然后利用开环频率特性设计环路补偿.比如,毕超等人以状态空间平均法作为建模方法,获取了系统的状态空间表达式及传递函数[3].冯丹、任宏滨、宁飞、张兴等人采用开关元件平均模型法进行开关电源变换器的建模[4].余明杨、蒋新华、王莉、唐建湘等人将神经网络和遗传算法用于开关电源的建模[5].时域试探法根据开关电源PWM占空比是否振荡来判断系统的稳定性,需要反复调整且更加耗时[2].
本文以Buck电路为主拓扑的稳压电源设计为例,利用Saber及时域分析工具Tdsa,进行开关电源环路补偿器的设计,并通过补偿前后仿真结果的比较,验证这种工程设计方法的可行性.
1 开关电源环路补偿的工程设计方法
1.1 开关电源环路补偿的设计准则
为了使开关电源系统稳定且具有较好的稳态和动态性能,在环路补偿的设计中,应使补偿后的系统开环传递函数符合以下4个准则.准则1:系统的相位裕度为45°~75°,相位裕度过大响应较慢,过小则系统容易进入不稳定状态[2].准则2:开环传递函数以-20 dB/dec的斜率穿越0 dB线,并且覆盖足够的频带宽度,保证系统的稳定性[6].准则3:开环传递函数的静态增益大小决定着输出值与给定值的稳态误差,增益高则系统的稳态精度高[2].准则4:兼顾系统的快速性及电源开关频率的限制,穿越频率小于1/6的开关频率[7],实际工程设计中可取为开关频率的1/10.
1.2 补偿器类型的选择依据
补偿器可以补偿系统性能上的不足之处.若系统的响应速度慢,可以加入比例环节,但可能降低稳定性,严重时造成不稳定,一般不单独使用.若系统的稳态误差大,可以加入积分环节,提高稳态精度,但可能降低稳定性.若系统的超调量过大,可以加入微分环节,但对高频噪声干扰信号具有一定的放大作用,对控制性能造成不利的影响.
1.3 开关电源环路补偿器的设计
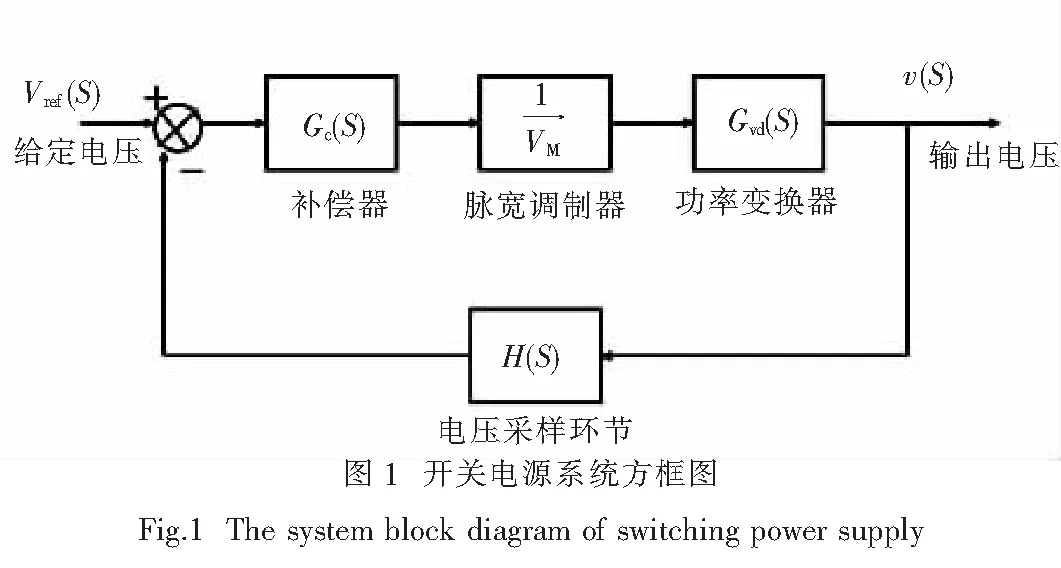
开关电源是一个闭环控制系统,其系统方框图如图1所示.
2 基于SG3525的12 V稳压电源的环路补偿器设计
本文以12 V稳压电源为例,进行环路补偿器设计.以SG3525为驱动芯片,功率变换器采用Buck电路,输入Vi=24 V,输出Vo=12 V,占空比=50%,负载为1 Ω电阻.
2.1 环路补偿前的瞬态分析
根据假定的输入输出及带载要求,Buck电路的各个参数可取值如下:输入Vi=24 V,输出Vo=12 V,占空比=50%,开关频率为100 kHz,L=20 μH,RL=0.000 1 Ω,C=940 μF,ESR=0.037 5 Ω,负载为1 Ω电阻,在5 ms时负载突变为10 Ω.
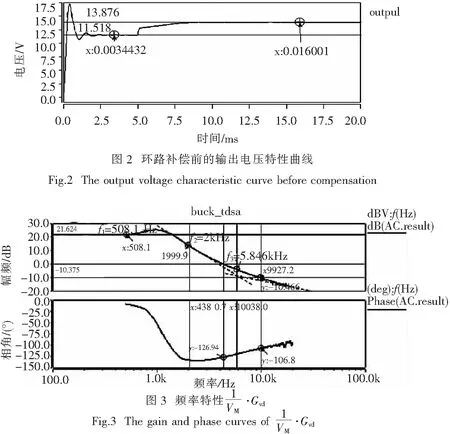
在Saber中对补偿前电压源做瞬态分析,得到环路补偿前的输出电压特性如图2所示.
2.2 Tdsa扫频分析

2.3 补偿器类型的选择
综合分析环路补偿前输出电压特性(图2)及补偿前开环频率特性(图3),可知系统的相位裕度为53.7°,符合准则1,系统是稳定的.但本系统存在两个问题:(1)静态增益太低,只有21.624 dB,稳态误差太大.当没有负载扰动时,静态误差为0.482 V,当存在负载扰动时,达到新稳态后静态误差为1.876 V.(2)当系统刚上电时,电压超调量太大,如果应用于一些较敏感的设备,这么高的超调量是不安全的.
根据以上分析,针对稳态误差大的问题,考虑加入积分环节;针对超调量大的问题,考虑加入微分环节.所以本例中补偿环节选用综合性较强的PID调节器.
2.4 补偿器的具体电路
本例中采用PID调节器,且需要从输出端取电压反馈,取采样电阻Rf1为5 kΩ,Rf2为1 kΩ,即H(s)=Rf2/(Rf1+Rf2)=1/6.从输出电压反馈到补偿器的具体电路如图4所示.

2.5 补偿器的参数设计
由补偿前系统幅频特性(图3)可知,其3个明显的转折频率分别为f1=508.1 Hz、f2=2 kHz和f3=5.846 kHz,并以-40 dB的斜率穿越0 dB线.而根据准则2,一般较好的控制系统以-20 dB的斜率穿越0 dB线,并且具有一定的频带宽度.
为了提高稳态精度,减小稳态误差,在频率小于f1的低频段,加入积分环节,积分环节的零点频率fL应远小于穿越频率fc,才不会影响到相位裕度[8].
根据准则4,取穿越频率为开关频率的1/10.本例中,开关频率为100 kHz,故fc=10 kHz.
根据准则2,为了使系统开环传递函数以-20 dB的斜率穿越0 dB线,并保证-20 dB的斜率具有一定的频带宽度,故可取fz=f2=2 kHz,fp=f3=5.846 kHz.
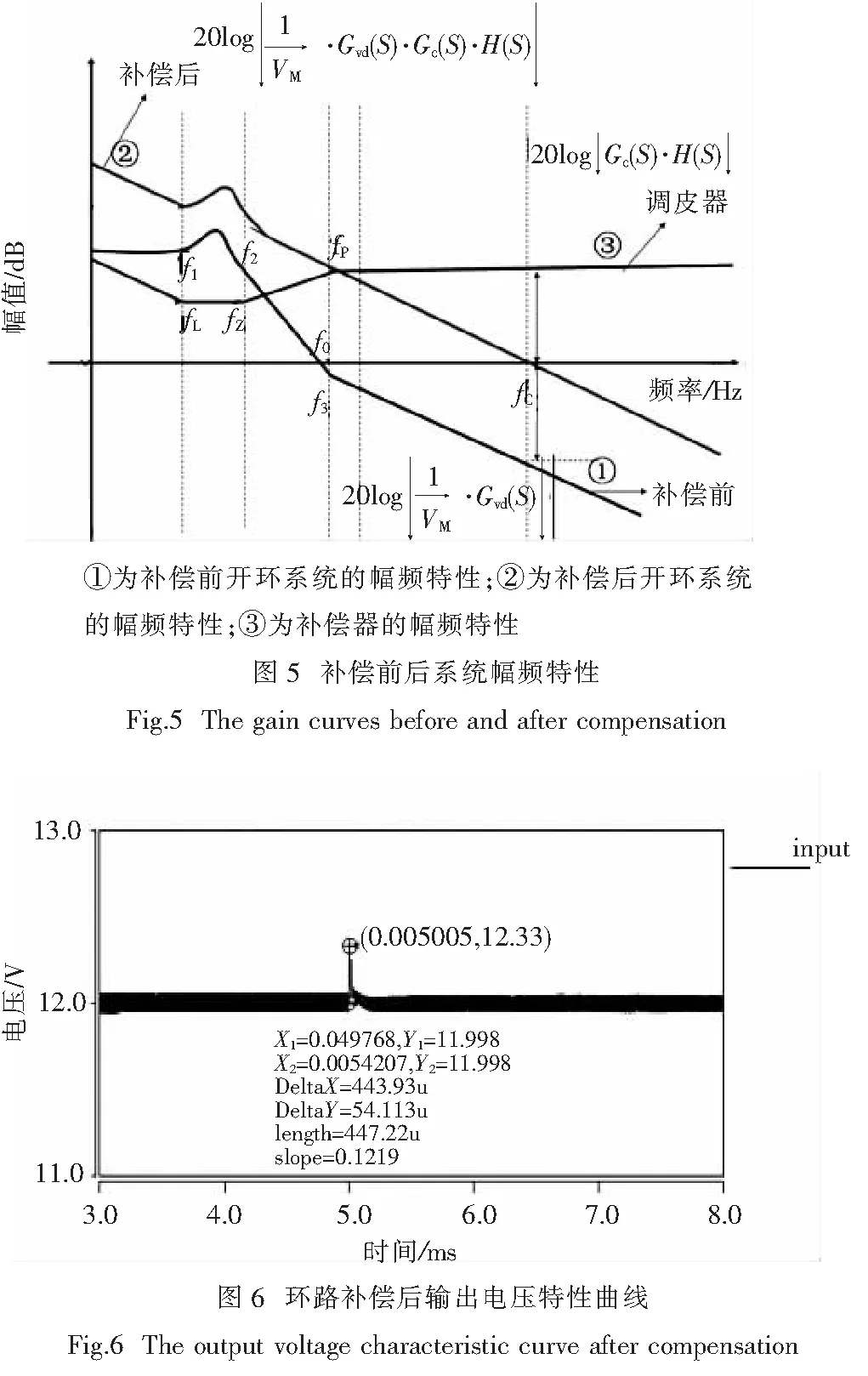
综上,补偿前后开环系统幅频特性如图5所示.

综上所述,补偿器及分压网络各参数全部确定,实际电源中,以上参数取最接近的标称值.
3 结果分析
环路补偿器设计完成,将其加入Buck电路闭环控制系统中,在 Saber中进行瞬态分析.其中,负载电阻为可变电阻,在0~5 ms时,其阻值为1 Ω,在5~10 ms时,其阻值为10 Ω,以此来模拟5 ms时的负载扰动.观察系统的输出响应曲线,如图6所示.将补偿前后的系统输出响应曲线对比可得:
结论1:当5 ms时施加负载扰动,经过约0.5 ms的响应时间,该系统回到新稳态,超调量为2.75%,稳态误差为0.002 V,相比于补偿前,系统的稳态性能得到大大的改善.
结论2:刚上电时的电压超调量大大减小了,响应时间在0.5 ms左右,系统既提高了响应速度又减小了超调量,保证了负载的安全工作.
综上所述,本系统补偿器的设计达到了预期的效果,改善了稳态性能和动态性能,验证了通过Saber辅助开关电源环路补偿设计的可行性.
本文通过一个实例介绍了基于Saber的开关电源环路补偿的工程设计方法,通过Saber的时域分析工具Tdsa得到控制系统开环传递函数的频域特性,代替复杂繁琐的功率变换器建模方法.结合波特图分析,得到补偿的方向及目标,确定补偿选用的调节器类型,完成具体的参数设计.最后通过补偿前后的仿真结果对比分析,发现补偿后的开关电源系统的稳态和动态性能都得到了较大改善.验证了实际工程设计中,以Saber及其Tdsa工具在辅助开关电源环路设计中的可行性及方便性.
[1] 岳中哲.反激式开关电源的环路分析与设计[J].电子技术应用, 2012, 38(6):61-63.
[2] 孙明.一种开关电源反馈回路补偿快速调整方法[J].电源技术应用, 2013, 38(10):45-48.
[3] 毕超,肖飞,谢桢,等.DC-DC开关电源的建模与控制设计[J].电源技术, 2014, 38(2):359-362.
[4] 冯丹,任宏滨,宁飞,等.开关电源变换器的小信号建模设计[J].计算机仿真, 2015, 32(11):141-144.
[5] 余明杨,蒋新华,王莉,等.开关电源的建模与优化设计研究[J].中国电机工程学报, 2006, 26(2):165-168.
[6] 陈伯时.电力拖动自动控制系统:运动控制系统[M].3版.北京:机械工业出版社, 2003.
[7] 朱乐超,陈呜,李舒然,等.基于SG3525电流连续型Boost电路补偿网络设计[J].电源技术, 2015, 39(9):1954.
[8] ROBERT W, ERICKSON,DRAGAN M. Fundamentals of power electronics[M].New York:Kluwer Academic Publishers, 2004:331-369
责任编辑:龙顺潮
An Engineering Design Method of Switching Power Supply Loop Compensation
LIULi-xuan,LIUJin-hai*
(College of Physics and Information Engineering, Minnan Normal University, Zhangzhou 363100 China)
Because of the complexity of power converter modeling, the article advances an engineering method of designing switching power supply loop compensation based on Saber and its Tdsa tool. By the use of Saber, the method gets the frequency domain characteristics of an open loop system thus getting the direction and goals of the expected compensation, combined with the performance required. Then, the compensation controller can be designed. Finally, the article expounds the concrete implementation steps of the method given, taking Buck converter for example, and its performances are improved, which verify feasibility of this engineering design method.
loop compensation; Saber; Tdsa; PID regulator
2016-06-01
福建省中青年教师教育科研基金项目(JA15299)
刘金海(1982—),男,福建 莆田人,博士,讲师.E-mail:22080049@qq.com
TN86
A
1000-5900(2016)04-0094-04