盲人建构陌生环境空间表征的策略及其作用*
2016-02-02谌小猛刘春玲乔福强戚克敏
谌小猛 刘春玲 乔福强 戚克敏
(1华南师范大学特殊教育学院,广州 510631)(2华东师范大学教育学部,上海 200063)
(3济南大学教育与心理科学学院,济南 250022)(4天津体育学院健康与运动科学系,天津 300381)
1 引言
空间表征是空间认知发展的一个重要组成部分,它是个体对空间环境信息的表征,是空间定向的基础。美国心理学家Tolman(1948)很早就对人和动物的空间表征进行了研究,他发现白鼠并不是按照单纯的刺激反应寻找目标,而是依靠这种表象化的空间表征高效地寻找路径、接近目标。在环境心理学和特殊教育领域,关于盲人空间表征的研究备受重视。因为失去视觉后,盲人更需要在大脑中构建精确的空间表征辅助自己在现实环境中定向行(Thinus-Blanc&Gaunet,1997)。
以往有关盲人空间表征的研究更多的是关注视觉经验缺失对于盲人熟悉环境空间表征的影响。例如,有研究者指出,早期视觉经验缺失个体(又称为先天盲)的空间表征并不够精确,是比较单一和片面的路径表征(route representation),难以达到后天盲(后天失明的个体)和明眼人那种场景表征(survey representation)的精确水平。持此类观点的研究者认为,视觉在空间知觉中扮演着统治性角色,早期视觉经历对于空间表征的建立具有重要意义(Thinus-Blanc&Gaunet,1997;Eimer,2004;Pasqualotto&Proulx,2012)。然而有部分研究指出,先天盲的空间表征未必比后天盲和明眼人差,视觉经验并不是精确表征形成的必要因素,先天盲依靠听觉、触觉、动觉和本体觉也可以获得高水平的空间表征,只是他们需要更长的加工时间(Millar,1994;Passini&Proulx,1988)。视觉经验缺失对于盲人空间表征的影响还不能达成一致。有研究者(Cattaneo et al.,2008)分析了以往实验研究结果的分歧,认为是各个实验采取的操作任务、研究范式、被试的差异等因素造成的。也有研究者(Kitchin,Blades,&Golledge,1997)直接批评了以往实验研究多在小场景空间中进行的,如果要想了解盲人对户外环境的空间表征,需要研究者从实验室走到现实户外环境中进行现场实验,而目前人类对盲人大场景空间表征的了解很不够。
另外,以往研究较少关注盲人探路过程中采用的策略对环境空间表征建构的影响(Pasqualotto&Proulx,2012)。Schinazi(2005)指出,仅仅研究视觉状况对盲人空间表征能力的影响只是一种静态分析,如果要想真正了解盲人空间表征,还需了解在空间表征形成过程中被试是如何感知环境的,采取的策略有哪些,运用不同的策略对空间表征的形成是否会产生不同的影响。因此,本研究除探讨视觉经验对盲人空间表征的影响外,重点探究盲人探路过程中的策略对其空间表征建构的影响。Dodds,Howarth和Carter(1982)的现场实验研究首次揭示了探路策略影响盲人空间表征的议题,研究者开车引导盲人被试熟悉空间环境,之后让被试从终点指向起点并回想沿途的其他地标,然后让被试摆出整个路径的模型,最后让被试描述自己在探路过程中采用的策略。结果表明,那些场景表征的盲人利用外部参照策略(external reference strategies)的方式编码环境信息,建构了精确空间表征;而路径表征的盲人则是以自我中心参照策略(egocentric reference strategies)的方式编码空间信息。研究者指出,正是采用了不同的策略,盲人群体内部的表现才会有如此大的差异。另外,Hill,Rieser,Hill和Hill(1993)关于盲人空间表征建构策略的实验研究被奉为经典。该研究是在一个大房间中进行的,参加者包括先天盲和后天盲的被试共65人,被试首先在房间内探索7个物体,这个过程不限时,主试通过录像记录被试的探路行为,之后让被试接受测验,测验任务是让被试指方向,即站到其中一个目标物处指向其他目标物,然后主试挑选出表现最好15名最差15名被试,通过分析他们探寻目标物的录像,找出其探路策略。结果发现,被试探路策略包括6种,即周边策略(perimeter strategy)、格子策略(grid strategy)、物物策略(object to object strategy)、物到周边策略(perimeter to object strategy)、物到基地策略(home base to object strategy)和表象策略(mental image strategy),表现最好的被试主要采取后4种策略,因为他们善于把握物物关系,而表现最差的被试采取前两种策略。
对盲人陌生环境空间表征的研究范式,以往主要采用“实地行走导航范式”,该范式的程序是,被试在没有任何行走辅具的情况下,由主试带领行走,之后被试独自探索该环境,在现实环境中接收空间表征任务测试(Picinali,Afonso,Denis,&Katz,2014)。本研究运用该范式考察视觉经验对盲人空间表征的影响,这也是日常情境下针对盲人定向行走训练的重要教学形式,即让明眼人带领被试在陌生环境中行走,之后让盲人独立行走,明眼人在旁边予以监督、提示并保证安全。这种实验范式的有效性在以有的诸多研究中得到了验证(Dodds et al.,1982;Passini,Proulx,&Rainville,1990;Golledge,Blades,Kitchin,&Jacobson,1999),其不仅考察被试的空间表征指标,还越来越重视评估被试在现实环境中的行走效率,因为只考察空间表征精确性而不关注现实行走情况,对于提高盲人定向行走能力的意义并不大(Kitchin&Jacobson,1997)。
综上,本研究的目的是探究盲人在陌生环境下的空间表征特点;探究不同视觉状况被试的探路策略,以及在不同策略条件下盲人空间表征的差异;另外,还探究空间表征能力与行走效率之间的关系。
2 方法
2.1 被试
本研究被试来自于某大学特教学院,包括盲人和明眼人。盲人被试筛选标准如下:第一,视觉方面。所有被试视力都要求在一级盲以下,并且无功能性视觉,盲人依靠非视觉通道,如听觉、触觉、嗅觉、味觉、动觉和前庭觉等获取环境信息;第二,行动能力方面。所有被试都能独立在户外行走一段1000 m的路程;第三,身心状况方面。所有被试除视力残疾外,没有其他残疾。此外,在划分先后天盲时,本研究参考经典综述文章Thinus-Blanc和Gaune(1997)之观点将分界点定为3岁,另外,Rieser,Guth和Hill(1982,1986)也将3岁作为分界点,这些研究者认为,被试在3岁前形成的视觉经验不会对其后来的空间认知有促进作用。所以最后研究者将3岁及以前失明的被试列为先天盲,3岁以后失明的列为后天盲,后天盲的致盲时间截止到参加本研究至少2年。
研究者根据以上筛选标准选取了55名盲人大学生。研究将大学一、二年级的学生划分为低年级组,大学三、四年级的学生划分为高年级组。明眼人被试则根据盲人被试的性别和年级比例来匹配,研究筛选了该学院特教系的25名大学生。表1为被试的分布情况。
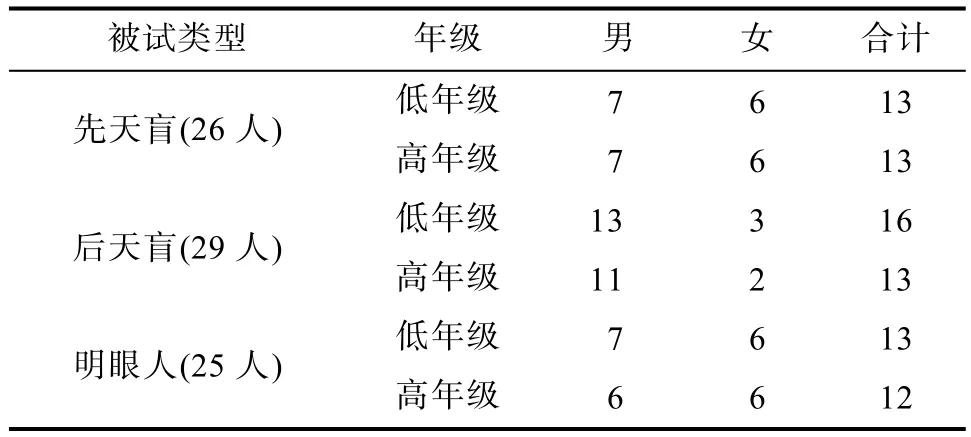
表1 被试的分布情况
2.2 研究环境
研究场地的选择参照了以往研究(Blades,Lippa,Golledge,Jacobson,&Kitchin,2002;Espinosa,Ungar,Ochaı́ta,Blades,&Spencer,1998;Passini&Proulx,1988)。一是场地为大场景,被试不能从环境中的一个角度纵览整个空间布局;二是被试认为陌生的环境,即被试几乎或完全没有来过;三是路线的拐角处呈90度,便于行走,如果路线是弧形的,被试很难完成行走的任务。本研究中采用的是被试感到陌生的环境,且被试之前都没有到过这个地方。图1中的线条代表主试引导被试行走的路线,全长612米。主试带领被试行走的起点为食堂门口(地标1),往前走经过第六公寓,在第六公寓处左转,继续往前走到一个铁丝网处(地标2),然后右转往前,再右转往前走,经过一个丁字路口继续往前走到第八公寓广告桶(地标3),之后到了路的尽头,右转,再往前走,走到一个路段的缺口左转,往前走,到达一个小坡,上坡后右转,到达第十二公寓的小巷子(地标4),继续往前走然后右转,往前走到一个路沿,右转往前走到一个减速带,再左转,往前走,最后到达第十一公寓的门口的台阶(地标5),即为终点。每个地标都容易被被试识别,例如,被试走完第六公寓时,在公寓的尽头可触摸到该铁丝网,在行走完图中最长的一段路径后,即可摸到广告桶;另外,主试在带领被试行走到终点——第十一公寓的台阶处时,主试告之测验路径行走结束,然后带领被试从另一条路径返回起点,返回路径是图中实线部分(此为干扰线路,为后面走捷径任务做准备,走捷径需要被试从虚线路径终点第十一公寓直接返回起点食堂),返回的路径比较曲折,需要穿过走廊、小门、超市、大厅,最后从第十一公寓正门走出,折回到起点——食堂。主试在第一、二轮带领被试行走的时候,要行走虚线和实线,第三轮被试独自行走,只需要走虚线部分。
2.3 研究材料
(1)磁条模型拼版。以往评估盲人空间认知地图的研究中会经常采用磁条模型拼板(Casey,1978;Tinti,Adenzato,Tamietto,&Cornoldi,2006),其包括磁条和拼板两个部分,磁条可以被盲人摸触到,且容易移动。磁条的型号包括两类:一类是长条形,型号为长(1.5 cm)×宽(0.5 cm);另一类是宽条形,型号为长(1 cm)×宽(0.9 cm)。长条形磁条用来摆放路径、宽条形磁条用来摆放地标,给予的磁条数量多于需要摆放地标及路径的数量之和。模型拼板型号为长(45 cm)×宽(60 cm)。磁条和模板都是磁性的,二者可以粘连在一起。

图1 陌生环境考核路径图
(2)摄像机。型号为Panasonic—HDC-TM40,用来拍摄被试摆放整体模型的过程,还用来记录被试在实验场地的行走过程。
(3)被试行为表现记录表。该表用来记录被试的基本背景信息、走捷径任务的路线、行走时间和偏离路径次数等。
(4)录音笔。品牌为HYNNDAI DIGITAL RECORDER,录音时间可达8 h,用于记录被试的访谈对话。
(5)秒表。品牌为JUNSD,型号为JS-306,该秒表可以精确到0.01秒,用来记录被试的行走时间。
2.4 研究程序
每个被试依次单独进行实验。在正式实验开始前,主试告知被试“这是一个定向行走的实验,考察的是你在陌生环境中定向和行走的情况、不能在行走的时候问询他人。实验包括三轮行走,第一、二轮由我带你行走,行走的时候我会告诉你遇到的地标,你需要努力记住这些地标,第三轮需要你独立行走,我在后面保证你的安全,在这个过程中你要完成相应的空间任务测试。”随后,主试可回答被试不清楚的问题,待被试完全理解实验步骤后进行实验。正式实验中第一、二轮是学习阶段,这两轮学习程序相同,主试带领被试行走,主试在前、被试在后,被试握住主试左上臂,在行走过程中主试告知被试需要注意的地标,这些地标都需要被试亲自接触到,带到终点之后,主试带被试从另外一条路径(干扰线路)回到之前的出发点。
在第三轮行走之前被试要摆放行走路径的模型,模型不仅要摆放路径,还要指出路径旁边的5个地标。在摆放模型的过程中,主试提供磁条模型和拼板,并回答被试不清楚的问题,但不包括空间位置问题,被试摆放的时间没有限制,摆完之后,主试记录被试的编号及模型,摆放模型整个过程需要录像,主试需要询问被试摆放的各个路径及地标。
模型摆放完后,被试开始第三轮行走。这一阶段,被试需要独自行走,主试在后面记录其行走表现,包括行走时间和偏离路径的次数,行走时间是整个行走路径的消耗时间,偏离路径的记录参考了Espinosa等人(1998)的研究,即偏离行走路径5米算一次错误,被试偏离5米后,主试将被试引导到正确路径(之前开始走错的地方),让被试继续行走,在此过程中,主试随时保证被试的安全。走到终点(第十一公寓)后,被试需要走捷径,即需要从第十一公寓直接走到起点(食堂),在这个过程中主试在记录本上记录被试行走的路径,事后根据这个记录评定被试走捷径任务的表现。
在完成以上程序后,研究者要对被试进行访谈,目的是探究被试在行走过程中采取的探路策略。主试的访谈提纲是“你最后一次如何独自行走这条路径的?依据什么往哪里走或往哪里转弯?你用地标找寻路径吗?如何找到的?你理解路径上各个地标点之间的关系吗?理解这种空间关系对于你行走有作用吗?”被试可能在回答第一个问题时就已经将自己的观念清晰地表述出来了,那么就不再问后面的一系类问题了。每个被试用时约为3小时。研究者用录音笔记录了与被试的对话,进而对这些录音内容进行深度分析,将其分为两类策略,两位编码者对这些访谈进行编码,一致性达到了95%,分类不一致时,两位编码者再调取访谈内容进行讨论。
2.5 测量指标
测量指标的选取主要参考了Golledge等人(1999),Blajenkova,Motes和Kozhevnikov(2005)的研究,采用了多个指标,从而使得结果能够相互印证,这也是以往多个研究者所倡导使用的方法。测量指标包括两大部分,第一部分是被试空间表征能力的测查,包括对摆放模型(又涵括对模型构成元素和整体精确性的评估)和走捷径的测查,见图2。第二部分是行走效率的测查。目的是最后计算空间表征能力与行走效率之间的关系,凸显空间表征能力的重要性。

图2 空间表征能力测查指标
对于第一部分指标。(一)对模型构成元素的评估。其一对于路径的考察。从被试摆放的距离、形状和方向三个维度计分,每个维度又分为3个等级,分数依次降低(第一等级为3分、第二等级2分、第三等级1分)。距离的3个等级说明:(1)能摆出最长边、最短边及其他大部分边;(2)能摆出最长边及大部分边,但不能摆出最短边;(3)不能摆出最长和最短边。形状的3个等级:

表2 模型路径评价维度及标准
(1)体现路径整体的形状;(2)环形形状;(3)线性形状。方向的3个等级:(1)终点在起点的东北方;(2)终点在起点的东南方;(3)终点在起点西方。具体说明见表2。其二对于地标的考察。从地标位置精确性来评定,具体看地标是否在路径正确的一侧,以及与其它地标的相对位置关系。总共有5个地标,每个1分。实际施测前,研究者已训练研究助理如何使用上面的方法计分。在计分者的一致性达0.80以上时,才进行正式施测。正式施测后,研究者将被试的模型照片找出来,与研究助理各自评分。最后以Spearman等级相关分别计算评分者在路径3个维度及地标评分的一致性,各个指标信度系数介于0.83~0.92。
(二)对模型整体精确性的评估。由于第一部分测量指标只能分析模型元素,而不能从整体上把握被试摆放模型的精确度,根据模型的整体结构和空间关系,如主要拐点、地标和路径段之间的空间一致性,再结合摆放模型特点,研究将模型分为3个等级:第一等级为精确的场景模型。以环境中心参照框架建构的模型,模型整体上精确地表征了实际空间布局,模型上的地标、路径能够清楚地被辨识,元素之间的距离相互协调,路径线条没有缺失,路径终点方向在起点的东北方,绝大部分地标的位置正确,没有缺失;第二等级为基本精确的场景模型。以环境中心参照为主、自我中心参照为辅建构的模型,模型大部分路径距离协调,终点方向在起点方向北部,线条缺失较少,地标位置也少有颠倒或错乱;第三等级为自我中心参照建构的模型。此类模型无明确空间形态,模型尽管包括一些转弯,但不能精确体现路径片段间的空间关系和长短关系,也不能描绘起点和终点的方向关系,即终点在起点东北方,大部分地标位置颠倒或者缺失。整体来看,被试形成的心理地图支离破碎,并且以各个独立的小空间来认知,无法掌握一个较大空间中各个物体及各个小空间的相关性。
经过训练的研究助理,参考此计分系统,根据录像画面各自评定等级,以Spearman等级相关求得两位评分者的一致性为0.90,计分不一致者,再调阅录像并和研究者一起讨论并修正。
(三)对走捷径(cut short)任务的考察。此任务是让被试直接从终点返回起点,然后根据被试行走路线的曲折性进行打分,如果被试直接从终点返回起点(西南方向)得3分,如果被试从终点向西走得2分,如果被试向东及南走则得1分。以Spearman等级相关分别计算评分者在各个测量指标评分的一致性,评分者的一致性为0.94。
对于第二部分指标。此部分测查被试的行走效率,即在现实环境中行走的时间和正确性。偏离次数的评估是主试记录被试偏离固定路径的距离,一旦距离超过5米算作偏离1次。行走时间的评估则是被试独自从起点走到终点所花费的时间。正式施测后,以Spearman等级相关计算评分者在偏离路径指标上评分的一致性,信度系数为0.85。
2.6 数据处理
采用SPSS 16.0分析软件进行数据处理和分析。
3 结果
3.1 盲人与明眼人在摆放模型上表现的比较
(1)不同视觉状况被试在模型路径维度上的表现
不同视觉状况被试在模型路径上得分的描述性统计见表3,模型路径从距离、方向和形状三个维度评定。
为了解不同视觉状况、性别个体在模型路径距离、方向和形状的正确性上是否有显著差异,进行3(视觉状况)×2(性别)×3(模型路径维度)重复测量方差分析,其中,前两者为被试间因素,模型路径维度为重复测量因素。结果显示:视觉状况主效应显著,F
(2,74)=23.67,p
<0.001,η=0.390,进行事后多重比较(LSD)发现,先天盲表现最差,与后天盲(p
<0.001)和明眼人(p
<0.001)差异极其显著,而后天盲与明眼人之间差异不显著(p
=0.138);性别主效应不显著,F
(1,74)=0.19,p
>0.1;模型路径维度主效应显著,F
(2,148)=8.43,p
<0.001,η=0.102,进行事后多重比较(LSD)发现,被试在方向上表现最好,与距离和形状的差异极其显著(分别为p
=0.007和p
=0.001),而距离与形状表现之间并无差异(p
>0.1)。视觉状况和模型路径维度的交互效应不显著,F
(4,148)=0.99,p
>0.1,其他因素之间的交互效应不显著(p
>0.1)。(2)不同视觉状况被试在模型地标上的表现
不同视觉状况被试在模型地标上得分的描述性统计见表4。为了解不同视觉状况、性别在模型地标位置正确性上是否有显著差异,以地标位置得分为因变量,进行3(视觉状况)×2(性别)被试间方差分析。
结果表明,视觉状况主效应显著,F
(2,74)=
17.38,p<
0.001,η=
0.320,进行事后多重比较(LSD)发现,先天盲(M
=2.56)表现最差,与明眼人(M
=4.440)和后天盲(M
=3.910)差异显著(显著水平都为p<
0.001),而后天盲与明眼人差异不显著(p
=0.161);性别主效应不显著,F
(1,74)=0.29,p
>0.1;各个因素之间的交互效应不显著(p
>0.1)。(3)不同视觉个体的模型等级状况
根据研究者定义的模型等级评分系统评定被试模型等级状况,不同视觉状况被试不同等级的人数和比例见表5。采用卡方检验考察3类视觉状况人群在3个等级上的人数比例之差异,得到χ(4)=24.23,p<
0.001。从表5中可以看出,明眼人绝大部分模型等级是第一等级;后天盲大部分为第一等级;而先天盲的分布情况正好与后天盲相反,大部分为第三等级。视觉状况与模型等级之间有显著的关联。
表3 不同视觉状况被试在模型路径得分的描述性统计

表4 不同视觉状况被试在模型地标上得分的描述性统计

表5 三类人群的模型等级分布

表6 不同视觉状况被试走捷径得分
3.2 不同视觉状况个体走捷径任务的情况
不同视觉状况个体走捷径任务的得分见表6。为了解不同视觉状况、性别的个体在走捷径任务上是否有显著差异,以走捷径得分为因变量,进行3(视觉状况)×2(性别)被试间方差分析。
结果表明,视觉状况的主效应显著,F
(2,74)=
9.95,p<
0.001,η=
0.212,进行事后多重比较(LSD)发现,先天盲(M
=1.976)表现最差,与明眼人(M
=2.840)和后天盲(M
=2.288)差异显著(显著水平分别为p
<0.001和p
<0.05),后天盲和明眼人差异显著(p
=0.011);性别主效应不显著,F
(1,74)=0.45,p
>0.1;各个因素之间的交互作用不存在显著效应(p
>0.1)。3.3 探路策略有效性分析
个体使用不同探路策略会影响其空间表征的形成。通过对被试访谈内容的分析,确定被试采用以下两类策略行走探路。在这里需要说明的是,被试实际使用的策略有4种,分别是参照点策略,参照点为主空间关系为辅的策略,空间关系策略和空间关系为主参照点为辅的策略,对应的人数分别是20人、10人、5人和20人。为便于统整和数据分析,研究将第一种和第二种策略归并为参照点策略,将第三和第四种策略归为空间关系策略。下面是两类策略的说明。
(1)参照点策略。被试主要利用行走路径上的地标、特殊声音、不同材质的地面作为最有效的探路线索,采用该策略的被试能够记得前后相继的地标,但不能理解地标间的空间关系。以下是部分被试的访谈结果。
“要是在拐角的地方,根据声音和地形的变化来转弯,沿着边,有缺口,然后出现拐弯。我没有形成整体的空间轮廓,如果要形成整体的空间轮廓,那么需要把点与点之间的路给连起来,我没把这些点连起来,有几次都走错了。主要是利用这些参照点来走的”。
“我没有形成整体空间轮廓,因为我之前是从来都没有看见过,对空间理解不是很明确,脑子里没有这个清晰的概念,不是很清晰”。
“主要是依据这种参照点,因为我们重庆那里的路很乱,比较复杂,一般靠声音来走的,不像这边的路修得都是直的,我们在重庆都是斜着走的,所以更多时候依靠声音来走的”。
(2)空间关系策略。被试主要使用方向、路线图的空间轮廓、物体空间关系作为最主要的探路线索。以下是部分被试的访谈结果。
“最主要依靠的还是大致的(头脑中)轮廓,因为你知道了一些参照点,但是你没有大致的轮廓,你走错了还是不知道回到正确的路线上来,我要是只顺着道牙走的话,就不知道走哪里去了”。
“我还是以方向为主,虽然记不住东南西北了,比如我知道我前面方向是在哪里,然后转完了,知道后面位置和前面地点的方向关系,但是距离不太准,方向是没错的,也运用了参照点,主要还是方向,我知道我走的方向没错,只是有时候拐弯的时候走过了,难度也不是很大”。
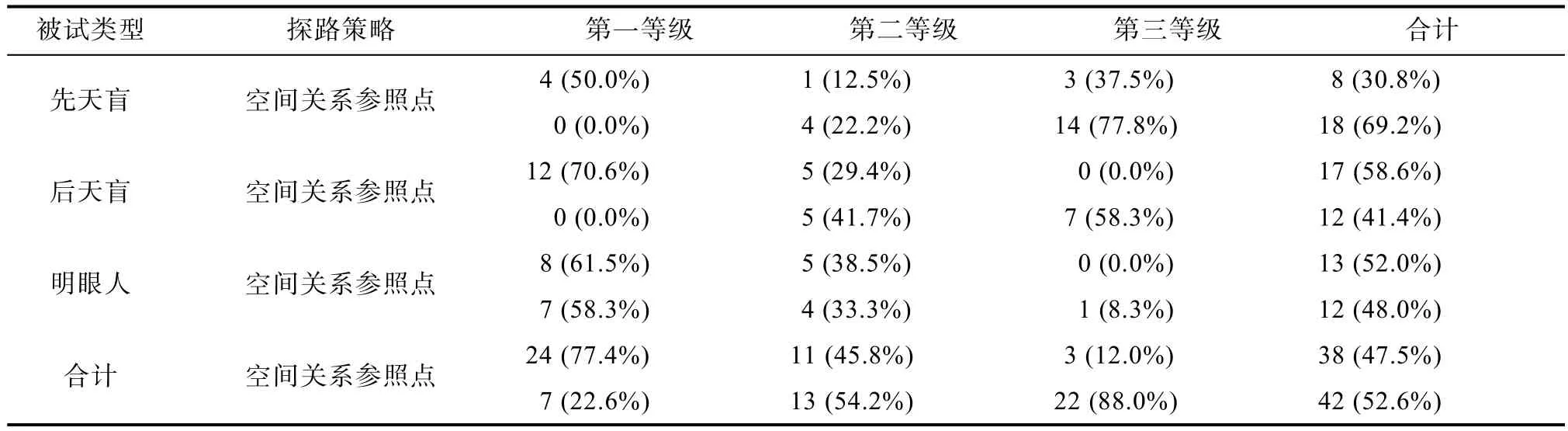
表7 采用不同策略被试的模型等级图分布
结果发现,不同视觉状况被试在行走时采取了不同的探路策略,具体人数与探路策略比例见表7。
使用卡方检验分别考察三类视觉状况人群在使用不同策略时的空间表征模型的等级状况。对于先天盲,发现其使用不同策略个体的空间表征模型等级不一样,得到χ(2)=10.65,p=
0.005,使用空间关系策略的被试只占30.8%,而使用参照点策略的被试占69.2%;使用空间关系策略被试空间表征模型的等级较高,第一等级和第二等级被试占62.5%,而使用参照点策略被试的模型等级绝大多数为第三等级,比例达到了77.8%。对于后天盲,也发现其使用不同策略个体的空间表征模型不同,χ(2)=18.69,p=
0.021,但其比例分布并与先天盲不同,从中发现使用空间关系策略被试的比例为58.6%,而使用参照点策略的被试占41.4%。使用空间关系策略被试空间表征模型的等级较高,第一等级和第二等级被试占100.0%,而使用参照点策略被试的模型等级大多数为第三等级,比例达到了58.3%;而对于明眼人,发现使用不同策略个体的空间表征并无差异,χ(2)=1.14,p=
0.566。被试运用探路策略与空间表征之间存在相关,采用空间关系策略盲人被试的空间表征能力要高。于是研究者欲进一步考察先天盲被试在现实环境中采用空间关系策略时空间表征能力是否要高,遂将先天盲中使用空间关系策略与有视觉经验的个体的表现进行对比。研究者将被试分为三类:采用空间关系策略的先天盲、采用参照点策略的先天盲、有视觉经验的被试(包括后天盲和明眼人),探究这三类被试之间空间表征能力的差异。以被试类型为自变量,走捷径正确性为因变量进行单因素方差分析(走捷径任务得分见表8)。
结果表明,被试类型主效应显著,F
(2,77)=
8.36,p
=0.003,η=
0.142,进行事后多重比较(LSD)发现,先天盲参照点策略被试(M
=1.222)表现最差,与先天盲空间关系策略(M
=2.500)和有视觉经验被试(M
=2.600)差异显著(显著水平分别为p
=0.038和p
<0.001),先天盲空间关系策略与有视觉经验被试差异不显著(p
=0.864)。
表8 三类被试的走捷径任务得分
3.4 被试空间表征能力与行走效率之间的相关分析
为了单纯研究盲人,仅以盲人被试为对象,探究其空间表征能力与行走效率之间的相关程度。空间表征能力体现在被试的摆放模型及在走捷径任务的得分上,而行走效率体现在被试行走时间和偏差次数上。
从表9中可以发现,绝大部分空间表征能力指标与行走效率之间存在显著相关,仅走捷径任务得分与行走效率之间相关不显著。由此可以说明,被试空间表征能力越强,个体行走效率也越高,表现在现实环境中,即为行走偏离路径的次数少,行走的速度快。

表9 被试空间表征能力同行走效率之间的相关
4 讨论
4.1 盲人对陌生环境空间表征的特点
本研究大部分先天盲对陌生环境的空间表征不够精确,具体表现在其摆放的路径模型无法辨认,被试不能够协调好路径的距离、方向和形状。他们摆放的模型路径长度与原始路径长度不成比例,且极易混淆长度相近的路段,这同Passini和Proulx(1988)和Rieser等人(1982)的研究结果一致。除了路径模型,绝大部分先天盲也不能正确完成走捷径任务,行走的线路比较死板,只知道行走路径的地标的前后相继关系,不知道终点与起点的相对位置关系。而绝大部分后天盲和明眼人经过两次带领行走后就能够摆出整个路径的精确模型,还能从路径终点精确地返回起点。后天盲之所以表现较好,是由于他们之前保存有视觉经验,对现实世界已经有了初步的视觉印象,也即视觉表象,当我们提起某个事物时,他们往往能够回想出物体的样貌,也能够记得行走路线的形状,所以在后天失明后,他们仍然能够将感受到的世界与之前视觉世界联系起来。如一位先天盲被试在访谈中这样提到自己的空间表征“我没有形成整体空间轮廓,因为我之前是从来都没有看见过,对空间理解不是很明确,脑子里没有这个清晰的概念,不是很清晰。”而一位后天盲被试指出“我对于失明之前的视觉世界还有印象,知道路的样子,也知道各个建筑物的形状,当我在环境中行走时,能够想象出这些物体的样子,这对于定向行走很有用”。这也印证了“盲人表象理论”的观点,该理论认为视觉表象对于人感受世界和形成空间概念具有重要作用,因为视觉表象可以认知经济的方式表征物理世界(Thinus-Blanc&Gaunet,1997),这就说明视觉经验对于空间表征的建构具有重要作用。
此外,本研究发现盲人空间表征能力并不存在性别差异。以往关于空间表征能力性别差异的研究甚多,但很少关注盲人,从已有对明眼人的研究结果来看,研究者并不能确定空间表征能力是否存在性别差异(Waller,1999)。在有关明眼人的研究中,一些研究结果发现男性倾向于使用视觉与前庭信号处理空间信息,女性则倚赖视觉线索进行加工(Viaud-Delmon,Ivanenko,Berthoz,&Jouvent,1998),男性对大场景空间信息的处理依赖视觉信息伴随本体觉和前庭觉,因此男性对大场景空间信息的处理优于女性,所以在明眼人研究中存在性别差异,但涉及到盲人时,由于所有被试不能利用视觉感知环境,男女被迫利用非视觉感官感受信息,也就是更多地利用本体觉和前庭觉感知外界信息,此时这种性别差异也就消失了。
4.2 有效探路策略对视觉缺失的弥补作用
虽然先天盲的空间表征能力普遍表现很差,但仍有个别被试表现较好,这些被试的空间表征模型达到了第一等级,这似乎与前面研究观点存在矛盾。其实不然,尽管视觉经验的缺失会降低盲人的空间表征能力,但这并不是说先天盲的表现无法达到后天盲或明眼人的水平,当先天盲个体采取合适的探路策略时,他们也可以对外在环境形成精确的空间表征。从模型外化来看,先天盲采用了空间关系策略后,摆出第一等级模型的被试超过一半,仅有小部分被试表现为第三等级,这是因为他们在采取空间关系策略时,倾向于以环境参照中心框架表征环境空间,把环境各个点在空间上串联起来,这样就比较容易把握各个地标点之间的位置关系,进而在行走时容易建构环境的空间表征;以上是被试在行走完全程之后摆模型的表现,而在现实环境中走捷径时,采取空间关系策略的先天盲也是容易把握终点和起点的方向,他们在走捷径方面的表现同有视觉经验的被试表现一样好。相反,那些采取参照点策略的先天盲表现是最差的,他们偏好以自我中心参照式的策略表征环境,在现实中以参照点建构行走的路线,导致其不能将各个地标连起来,也不知道它们的空间关系。本研究结果同Gaunet和Thinus-Blanc(1996)的研究结果一致,即那些采用环境中心参照表征的盲人被试空间表征更为精确,他们更善于把握物体之间的空间关系,而以自我中心参照表征的盲人被试空间表征更弱,更多以环形策略探索环境,以身体为参照轴表征环境。
最近脑神经科学领域,相关研究探讨了盲人空间表征形成过程中探路策略的神经机制(Fortin et al.,2008;Kupers,Chebat,Madsen,Paulson,&Ptito,2010;Halko,Connors,Sánchez,&Merabet,2014)。从这些研究来看,盲人建构空间表征的方式可能与明眼人存在不同,表现为盲人偏好以自我中心参照框架表征空间信息,其对应的是前海马的激活,也就是说盲人偏好以自我中心参照表征环境与前海马体积增大、激活有关;而明眼人偏好以环境参照框架表征空间信息,其后海马体积较大、且存在激活。两种表征策略导致空间表征的结构也不同,前者往往为不精确的路径表征,而后者为精确的场景表征。根据被试的访谈记录,本研究发现的参照点策略其实是一种自我中心参照策略,而空间关系策略则是环境中心参照策略。
4.3 盲人空间表征能力与行走效率之间的关系
对于盲人空间表征能力与行走效率之间的关系,以往几乎没有相关研究涉及。Schmidt,Tinti,Fantino,Mammarella和Cornoldi(2013)认为空间表征能力越强,行走效率越高,但没有从实证的角度予以验证,而本研究利用较大样本人数探讨二者之间的关系,结果发现大部分空间表征任务指标与行走效率指标之间存在显著相关,又因为空间表征外化任务在前行走效率测量在后,所以可以认为空间表征对行走效率有较强的预测作用。该结论具有重要意义,因为这说明空间表征能力强的被试的行走效率也高。从另一方面说明空间表征这个主题是值得研究的,所以在后续研究中,研究者将重点关注盲人空间表征能力的提升。
5 研究的限制与不足
本研究可能存在以下限制与不足。首先是被试量的问题。先天盲和后天盲的被试量分别为26人和29人,数量偏少可能会影响研究结果的解释与推广,但是考虑到特殊被试的现实情况,寻找到更多被试确实不易。本研究的被试来自于东北一个省会城市大学的特殊教育学院,该学院集中了我国大部分的视障大学生,人数有250多人,而真正符合本研究筛选标准的仅仅有60多人,然而又有部分被试不愿意参加实验或者中途退出,最后只有55人参加全程实验;另外,盲人被试行动不方便,研究者不易从其他地区调动被试,所以最后只有50多人;与此同时,以往关于盲人的探路研究,被试数量也不多或者更少,比如,Picard和Pry(2009)研究中,视障被试总共10名;Tinti等人(2006)研究中,先天盲是20人,后天盲13人,明眼人20人。在特殊人群的研究中,这个问题可能是比较普遍的现象。其次,实验空间环境的问题。本研究的空间布局较为规则,可能不具有代表性。这也是受现实条件所困,研究的地点在东北某省会城市,该城市布局整体上是方方正正格局,东西南北分明,所以就地进行实验,盲人被试获取不易,也就没有到其他城市进行实验。此外,本研究场景与以往诸多盲人探路研究场景相似,比如,Espinosa等(1998),Blades等(2002)的研究,本研究的实验场景选取参阅了这些相关研究。尽管存在以上问题,但是研究相对于传统注重实验室研究依然作出了有益的探索,揭示了盲人空间表征的特点及探路策略对于空间表征建构的影响,这对于盲人定向行走的训练具有一定的借鉴意义。
6 结论
(1)视觉经验缺失对盲人陌生环境空间表征能力造成了不利影响。先天盲空间表征能力显著低于后天盲和明眼人,而有视觉经验的后天盲与明眼人之间没有存在显著差异。大部分先天盲在经过两次带领行走后,对环境空间表征仍然较差,而大部分后天盲及明眼人以环境中心参照的场景表征为主。性别差异没有影响盲人的空间表征能力。
(2)先天盲采取有效的探路策略可以弥补视觉缺失带来的损失。在陌生环境中,大部分后天盲及明眼人被试采用的是空间关系策略,形成的表征类型为场景表征,而大部分先天盲采用的参照点策略,导致其空间表征类型为路径表征。而少部分先天盲运用有效的探路策略可以有效弥补视觉缺失带来的损失,他们运用空间关系策略后,形成的空间表征类型以场景表征为主,而运用参照点策略的先天盲表现最差,空间表征类型以路径表征为主。
(3)空间表征能力同被试行走效率之间存在显著相关,空间表征能力强的盲人行走时间少,偏离次数也少。
Blades,M.,Lippa,Y.,Golledge,R.G.,Jacobson,R.D.,&Kitchin,R.M.(2002).The effect of spatial tasks on visually impaired peoples'wayfinding abilities.Journal of Visual Impairment&Blindness,96
(6),407–419.Blajenkova,O.,Motes,M.A.,&Kozhevnikov,M.(2005).Individualdifferences in the representations of novel environments.Journal of Environmental Psychology,25
(1),97–109.Casey,S.M.(1978).Cognitive mapping by the blind.Journal of Visual Impairment&Blindness,72
(8),297–301.Cattaneo,Z.,Vecchi,T.,Cornoldi,C.,Mammarella,I.,Bonino,D.,Ricciardi,E.,&Pietrini,P.(2008).Imagery and spatial processes in blindness and visual impairment.Neuroscience&Biobehavioral Reviews
,32
(8),1346–1360.Dodds,A.G.,Howarth,C.I.,&Carter,D.C.(1982).The mental maps of the blind:The role of previous visual experience.Journal of Visual Impairment&Blindness,76
(1),5–12.Eimer,M.(2004).Multisensory integration:How visual experience shapes spatial Perception.Current biology,14
(3),R115–R117.Espinosa,M.A.,Ungar,S.,Ochaı́ta,E.,Blades,M.,&Spencer,C.(1998).Comparing methods for introducing blind and visually impaired people to unfamiliar urban environments.Journal of Environmental Psychology,18
(3),277–287.Fortin,M.,Voss,P.,Lord,C.,Lassonde,M.,Pruessner,J.,Saint-Amour,D.,…Lepore,F.(2008).Wayfinding in the blind:Larger hippocampal volume and supranormal spatial navigation.Brain,131
(11),2995–3005.Gaunet,F.,&Thinus-Blanc,C.(1996).Early-blind subjects'spatial abilities in the locomotor space:Exploratory strategies andreaction-to-change performance.Perception,25
,967–982.Golledge,R.,Blades,M.,Kitchin,R.M.,&Jacobson,R.D.(1999).Understanding geographic space without the use of vision.NSF Report SBR95-14907.
Halko,M.A.,Connors,E.C.,Sánchez,J.,&Merabet,L.B.(2014).Real world navigation independence in the early blind correlates with differential brain activity associated with virtual navigation.Human Brain Mapping,35
(6),2768–2778.Hill,E.W.,Rieser,J.J.,Hill,M.M.,&Hill,M.(1993).How persons with visual impairments explore novel spaces:Strategies of good and poor performers.Journal of Visual Impairment&Blindness,87
(8),295–301.Kitchin,R.M.,Blades,M.,&Golledge,R.G.(1997).Understanding spatial concepts at the geographic scale without the useofvision.ProgressinHumanGeography,21
(2),225–242.Kitchin,R.M.,&Jacobson,R.D.(1997).Techniques to collect and analyze the cognitive map knowledge of persons with visual impairment or blindness:Issues of validity.Journal of Visual Impairment&Blindness,91
(4),360–376.Kupers,R.,Chebat,D.R.,Madsen,K.H.,Paulson,O.B.,&Ptito,M.(2010).Neural correlates of virtual route recognition in congenital blindness.Proceedings of the National Academy ofSciencesofthe United Statesof America,107
(28),12716–12721.Millar,S.(1994).Understanding and representing space:Theory and evidence from studies with blind and sighted children
(pp.1–214).Oxford:ClarendonPress/Oxford UniversityPress.Pasqualotto,A.,&Proulx,M.J.(2012).The role of visual experience for the neuralbasis of spatial cognition.Neuroscience&Biobehavioral Reviews,36
(4),1179–1187.Passini,R.,&Proulx,G.(1988).Wayfinding without vision:An experiment with congenitally totally blind people.Environment and Behavior,20
(2),227–252.Passini,R.,Proulx,G.,&Rainville,C.(1990).The spatiocognitive abilities ofthe visually impaired population.Environment and Behavior,22
(1),91–118.Picard,D.,& Pry,R.(2009).Does knowledge of spatial configuration in adults with visual impairments improve with tactile exposure to a small-scale model of their urban environment.Journal of Visual Impairment and Blindness,103
(4),199–209.Picinali,L.,Afonso,A.,Denis,M.,&Katz,B.F.G.(2014).Exploration of architectural spaces by blind people using auditory virtual reality for the construction of spatial knowledge.International Journal of Human-Computer Studies,72
(4),393–407.Rieser,J.J.,Guth,D.A.,&Hill,E.W.(1982).Mental processes mediating independent travel:Implications for orientation and mobility.Journal of Visual Impairment&Blindness,76
(6),213–218.Rieser,J.J.,Guth,D.A.,&Hill,E.W.(1986).Sensitivity to perspective structure while walking without vision.Perception,15
(2),173–188.Schmidt,S.,Tinti,C.,Fantino,M.,Mammarella,I.C.,&Cornoldi,C.(2013).Spatial representations in blind people:The role of strategies and mobility skills.Acta Psychologica,142(1),43–50.
Schinazi,V.R.(2005).Spatial representation and low vision:Two studies on the content,accuracy and utility of mental representations.InInternational Congress Series
(Vol.1282,pp.1063–1067).London,UK:Elsevier.Thinus-Blanc,C.,&Gaunet,F.(1997).Representation of space in blind persons:Vision as a spatial sense?.Psychological Bulletin,121
(1),20–42.Tinti,C.,Adenzato,M.,Tamietto,M.,&Cornoldi,C.(2006).Visual experience is not necessary for efficient survey spatial cognition:Evidence from blindness.The Quarterly Journal of Experimental Psychology,59
(7),1306–1328.Tolman,E.C.(1948).Cognitivemaps in rats and men.Psychological Review,55
(4),189–208.Viaud-Delmon,I.,Ivanenko,Y.P.,Berthoz,A.,&Jouvent,R.(1998).Sex,lies and virtual reality.Nature Neuroscience
,1
(1),15–16.Waller,D.A.(1999).An assessment of individual differences in spatialknowledge ofrealand virtualenvironments
(Unpublished doctoria l dissertation).University of Washington.