混砂车流量控制模块的研究与仿真
2016-01-29张可可张晓丽唐美韩致信
张可可,张晓丽,唐美,韩致信
(1. 兰州理工大学 机电工程学院,甘肃 兰州 730050; 2. 河南汝阳县农村公路管理所,河南 汝阳 471200)
混砂车流量控制模块的研究与仿真
张可可1,张晓丽2,唐美1,韩致信1
(1. 兰州理工大学 机电工程学院,甘肃 兰州 730050; 2. 河南汝阳县农村公路管理所,河南 汝阳 471200)
摘要:为了解决混砂车流量模块在换向过程中或在流量突变时出现波动的现象,利用Matlab软件来仿真混砂车流量模块的控制系统,确定更佳的PID控制算法。可使流量模块在作业过程中更加平稳、快速, 并为解决此类问题提供了理论依据。
关键词:混砂车;流量控制;PID控制;Matlab;仿真
Research on Flow Control Module of Fracturing Blender Truck and Its Simulation
ZHANG Keke1,ZHANG Xiaoli2,TANG Mei1,HAN Zhixin1
(1. College of Mechanical and Electrical Engineering,Lanzhou University of Technology, Lanzhou 730050,China;
2. Highway Management Department of Ruyang,Ruyang 471200,China)
Abstract:In order to solve the fluctuating phenomenon of flow control module of fracturing blender truck during reversing valves or a sudden change of flow quantity, this thesis utilizes Matlab software for simulating the control system of the flow control module and for getting a better PID control algorithm which is used to make the work process of the flow control module more quick and smooth. The theoretical basis is provided for solving the problem.
Keywords:flow module; flow control; PID control; Matlab; simulation
0引言
在油田资源的开采中,为了提高单井油气的开采价值,压裂技术成为单井油气增产、增效的有效手段之一[1]。压裂设备由仪表车、混砂车、压裂车和管汇车组成,其中混砂车是压裂设备中不可或缺的设备之一,其功能是为压裂车提供压裂作业的混合液[2]。为了实现混砂车的自动化控制功能,必须实现发动机、流量、输砂器等模块的自动化控制[3]。
流量模块是混砂车的主要模块之一,其功能是为压裂车输送混沙液,其自动化的程度优劣直接影响到整个压裂设备的自动化程度[4]。流量控制模块包括硬件和软件两个部分[5],硬件部分采用改进的闭式液压回路和PLC控制器来控制,软件部分采用优化的PID控制算法,来实现流量模块硬件和软件的最优化控制[6]。
1对混砂车流量控制模块的要求
流量模块包括水流、砂子、流量输出、砂比和混合罐的液面等子模块[4]。
水流和砂子,是作为混合液的基液。其特点:为保证混合罐的供给流量稳定,混合罐吸入端不能有过高的压头,一般压力不超过0.05MPa。由于管路存在流量的损失和突变,须使吸入泵的总流量大于排出泵的总流量。
流量输出,是混合液流量输出部分。根据工作需要,输出端的流量需随工作环境的改变而改变。为了使混砂车管路上的流量能正常供应和保证压裂车输入端流量稳定,需使混砂车输出管路的工作压力在0.3~0.6MPa之间[2-5]。
砂比部分,是水流量和砂流量的比例控制部分。为满足在各种情况下压裂作业的需求,需配置出不同砂比的压裂混合液,以提高压裂作业的高效性和适用型。
混合罐液面高度的突变,作为水流量、砂流量和混合液排出量的干扰量。控制混合罐的液面高度,来保证流量模块的排出量和输入量相匹配,使液压作业正常进行。
2混砂车流量控制模块的硬件
2.1流量模块的硬件整体构成
流量模块的硬件控制部分采用在PLC控制器的作用下,结合闭式液压系统,来实现其控制功能。其整体构成见图1。
2.2液压控制部分
混砂车流量模块采用闭式液压系统和电液比例换向阀相互结合的方法来共同控制。在本模块的液压控制部分中包括4个子模块,即吸入子模块、吸砂子模块(左搅龙、右搅龙)、排出子模块,均是通过控制电液比例换向阀的电流大小来控制变量泵的流量。流量模块的液压控制部分主要有变量泵、电液比例换向阀、溢流阀、冷却器、定量液压马达等液压元件构成(图1(b))。主要控制部分有:输送砂子、输送水流、输送混合液、补油、过压保护、冷却等子部分。输送砂子部分依靠吸砂子模块来实现;输送水流子部分依靠吸水子模块来实现;输送混合液子部分依靠排出子模块来实现。吸砂子模块、吸水子模块、排出子模块主要有变量泵、电液比例换向阀、定量马达等液压元件构成。补油装置子部分主要有溢流阀等液压元件构成,其功能为:由于在油路、泵体、液压马达中存在着泄露问题,需在油路中添加了补油装置;冷却子部分主要有冷却器等元件构成,其功能为:以防液压油的温度过高,影响液压油的性能;吸砂子模块分为两个部分,即左右搅龙,其功能为:单独提供动力,效率更高,动力更大,使子模块的使用范围更宽。

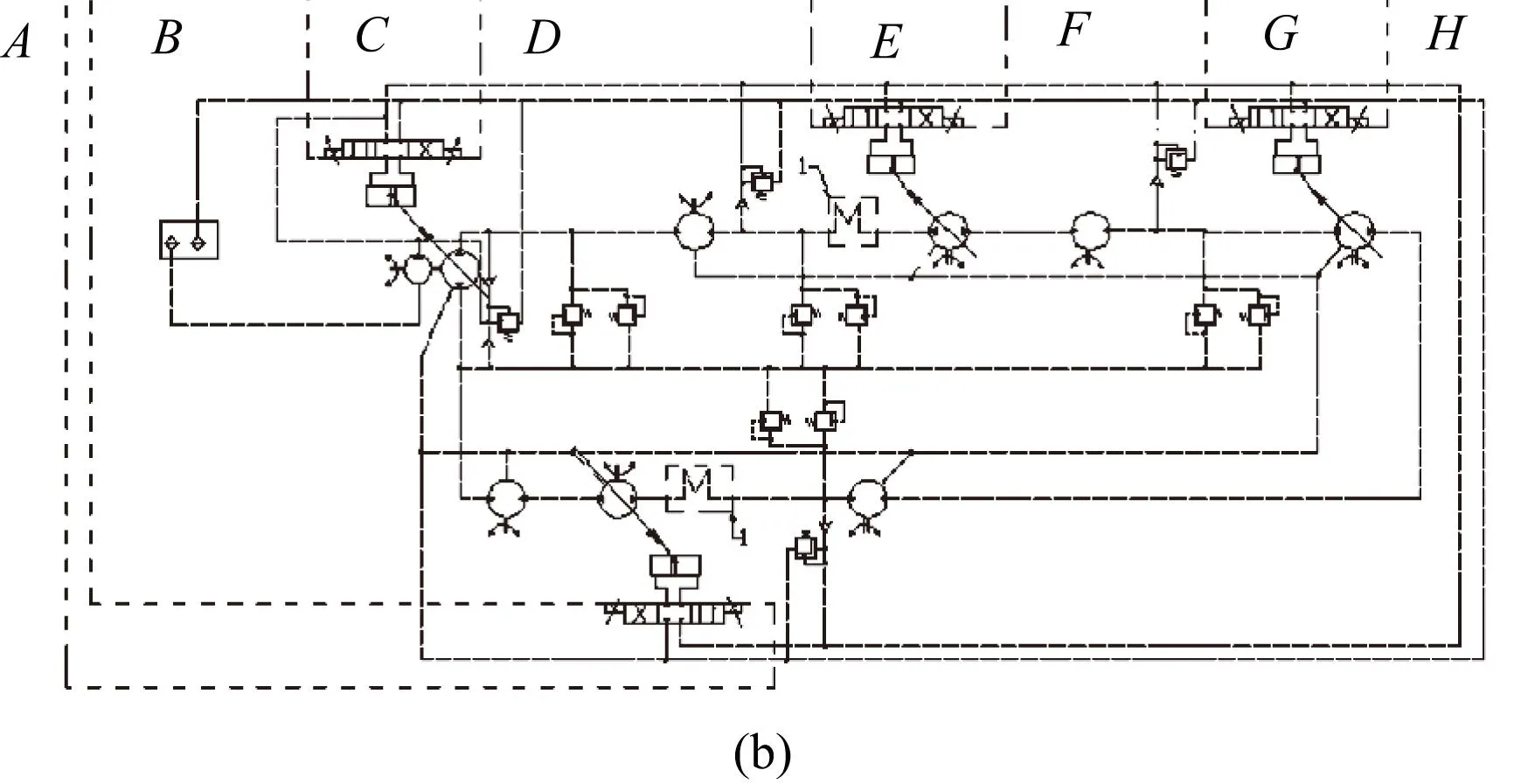
图1 流量模块的整体构成图
2.3PLC控制部分
为了实现混砂车的自动化控制,其控制器选用功能强大、控制可靠的可编程逻辑控制器(简称PLC)。流量模块的PLC部分主要有PLC控制器、流量传感器、密度传感器、液面传感器、蝶阀、脉冲放大器等构成。其主要控制模块有:吸砂子模块、吸水子模块、排出子模块。流量传感器的功能是监测吸水子模块、吸砂子模块、排出子模块的流量大小;液面传感器的功能是监测混合罐的液面高低,密度传感器的功能是监测输出混合液的含砂比大小。其工作原理为:通过对吸入子模块前置或排出子模块后置流量传感器的监测,得到电流信号,把电流信号通过脉冲放大器之后得到放大后的标准电流信号;把其数据送到PLC经过处理之后来控制蝶阀的截止、变量泵的流量变化等功能,见图1(a)。
3流量模块在PLC中的控制算法及仿真
由于在流量模块的控制系统中,对左右搅龙、吸入泵、
排出泵的流量控制,采用的是通过控制电液比例换向阀的电压大小来实现活塞缸的活塞位移变化,进而控制变量泵的流量改变,其三位四通电液比例换向阀控制活塞缸的动力结构见图2[7]。

图2 三位四通电液比例换向阀的动力结构
对阀控缸的结构分析,以电液比例换向阀的输入电压u作为子模块的输入,以液压缸的直线位移y0作为子模块的输出,可知此控制子模块的传递函数[6-7]为:
(1)
式中:Kwv为电液比例换向阀的输入电压-活塞缸的速度增益(m.s-1.V-1);
TR为时间常数(s),一般不考虑,即为0;
Tx为电液比例换向阀阀芯的时间常数(s);
ωn为机构的固有频率(rad/s);
ξ为机构的阻尼比。
此子模块采用的三位四通比例阀型号为4WRAE6E1-15,该阀属于不对称阀。液压缸选用用HSG#01-50/dE,把相关参数带入式(1),可得:
(2)
在此子模块中对控制算法的选择,由于传递函数是可知的,根据PID和模糊控制算法的特点,在传递函数可知的情况下,可以采用PID控制算法。对于很难建立起具体的数学模型的复杂系统,可以采用模糊控制算法,所以此子模块选用PID控制算法要优于模糊控制算法。其PID控制流量的仿真模块图见图3。
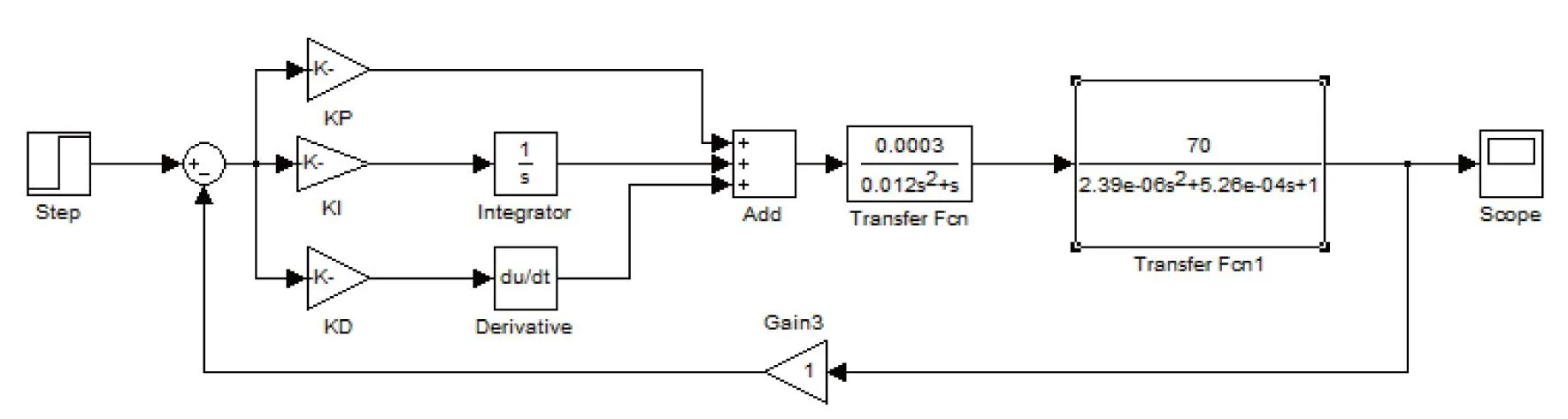
图3 加入PID控制流量的仿真模块图
在PID控制算法中,采用Ziegler-Nichor的方法来整定PID参数,在Matlab环境下,通过编写仿真程序,可以得到KP= 1.8191e+04;KI=1.9634e+06;KD=42.1363。结合传递函数,在节跃响应的作用下,通过编写程序,在Matlab环境下进行仿真,可得到响应图像见图4。
通过对阀控缸的控制子模块仿真结果分析可知:子模块的超调量为82.1%,调整时间为0.113s,上升时间为0.00316s。可知采用整定后PID参数使子模块的超调量稍大,响应很快,使子模块在流量改变的情况下存在着波动的可能。
根据整定后PID响应图像和PID的P、I、D参数的特点,需对PID的相应参数进行改进。由于整定后仿真图像的超调量过大,可知设置的K和I稍大,所以可进对K和I的值进行优化。最后调整PID各个参数值为kp'=1.8191e+03;ki'=1.9634e+03;kd'=42.1363。通过Matlab仿真,可以得到阀控缸的仿真图像(图4)。

图4 阀控缸的仿真图像
4结语
提出在流量模块控制系统中,硬件部分采用改进的液压闭环控制回路,使流量模块的结构更加紧凑;在反馈方面,采用了前置控制,使模块的响应更加快捷。在变量泵控制系统软件部分,通过Ziegler-Nichor的方法整定,得到的整定后的P、I、D参数,通过仿真得到图像可知,其超调量过大,会使电液比例换向阀在换向过程出现波动,需要对PID参数进行优化。通过优化后的PID参数,可得到的仿真图像,没有超调量,调整的时间也很短。所以选用改进后的PID参数,可使三位四通比例换向阀在换向调速的时候更加平稳和快速,为解决混砂车流量模块在换向过程出现波动或流量出现突变的现象提供了理论依据。
参考文献:
[1] 范新强,楼国祥,郑穗嫔,等. 基于PLC控制混砂车液位自动控制系统研究[J]. 石油矿场机械,2011,40(3):88-89.
[2] 吴汉川,王峻乔,仇黎明. 混砂车吸入排出性能研究[J]. 石油机械,2013,41(3):92-95.
[3] 张宝弟,张晓东. 自动控制混砂车液压系统设计[J]. 石油机械,2005,23(5):6-39.
[4] 吴汉川,高文金. 混砂车自动控制系统的研究[J]. 石油机械,2003,(31):63-65.
[5] 郭阳宽,王正林. 过程控制工程及仿真[M]. 北京:电子工业出版社,2009.
[6] 王婷婷,邵克勇. 水力压裂混合液密度模糊控制方法研究[J]. 工业控制与应用,2007,26(10):45-46.
[7] 肖体兵,肖世耀,廖辉,等. 三位四通电液比例阀控缸动力机构的数学建模[J]. 机床与液压,2008,36(8):80-82,132.


收稿日期:2014-01-14
中图分类号:TP273
文献标志码:B
文章编号:1671-5276(2015)04-0086-02
作者简介:张可可(1987-),男,河南洛阳人,硕士研究生,研究方向为机械控制系统。
