一种多传感器空情信息融合算法*
2016-01-27苏春梅何剑伟李永刚郭力兵
苏春梅,何剑伟,李永刚,郭力兵
(解放军63680部队 技术部,江苏 江阴 214431)
一种多传感器空情信息融合算法*
苏春梅**,何剑伟,李永刚,郭力兵
(解放军63680部队 技术部,江苏 江阴 214431)
摘要:针对防空指挥系统快速反应决策能力要求,给出了可行的系统信息融合处理软件组成结构及功能描述,提出了一种适用于快速空情信息融合的通用信息融合处理方法和模型算法。建模过程中,提出的信息融合处理方法和模型算法将防空指挥系统信息融合的复杂过程条理化、公式化和数字化。仿真结果证明,该方法是正确和有效的。目前,该方法已应用到实际工程中。
关键词:防空指挥系统;多传感器信息融合;航迹关联;卡尔曼滤波
doi:10.3969/j.issn.1001-893x.2015.02.014
引用格式:苏春梅,何剑伟,李永刚,等.一种多传感器空情信息融合算法[J].电讯技术,2015,55(2):193-199.[SU Chunmei,HE Jianwei,LI Yonggang,et al.A Multisensor Aerial Information Fusion Algorithm[J].Telecommunication Engineering,2015,55(2):193-199.]
中图分类号:TP391
文献标志码:码:A
文章编号:号:1001-893X(2015)02-0193-07
收稿日期:*2014-06-28;修回日期:2015-01-19Received date:2014-06-28;Revised date:2015-01-19
通讯作者:*suchunmei@163.comCorresponding author:suchunmei@163.com
Abstract:According to the requirement of quick response ability for air defense command system decision,this paper provides an architecture and function description,and proposes a general method of information fusion suitable for aerial information fusion.The proposed method and model algorithm formulize and digitize the complex process of air defense command system information fusion.Simulation results prove that the model is correct and effective.The model has already been applied in engineering.
作者简介:
A Multisensor Aerial Information Fusion Algorithm
SU Chunmei,HE Jianwei,LI Yonggang,GUO Libing
(Department of Test Technology,Unit 63680 of PLA,Jiangyin 214431,China)
Key words:air defense command system;multisensor information fusion;track association;Kalman filtering
1引言
多传感器信息融合是现代防空指挥系统的重要支撑技术,没有现代化的信息融合,就不能做到快速决策、快速部署、快速反应和有效打击,也就不能掌握制空权,近而赢得现代战争的主动。
对于防空指挥系统的信息融合主要包括数据检测、互联、相关、状态估计等[1]。快速反应决策能力是防空指挥系统的重要战技指标,系统快速反应决策意味着系统输入信息的实时融合处理响应,本文针对上述要求,分析描述了防空指挥系统信息融合处理软件组成结构及功能,提出了一种适用于空情信息融合的多目标、多信息源融合处理方法和模型算法,并从提高系统运算速度角度出发结合工程实际,提出一些模型优化方法,即保证了防空指挥系统信息融合的正确性,又提高了系统的快速反应和决策能力。
2空情信息融合
目前,在防空指挥系统中,空情信息源是由部署在不同地域上多种类型的传感器提供的,有的还来自空中指挥平台、上级机关及其他协同信息,它们所提供的空情信息极为丰富,但又是不完整的。要将来自不同信息源的信息按空中不同目标的航迹进行分类编号,是防空指挥系统信息融合中首先要解决的问题。防空指挥系统信息融合涉及到广泛的数学建模问题。数学建模是计算机编程的基础,灵活高效的空情信息融合处理软件[2],除与计算机软件平台和编程技巧有关外,起决定性作用的是空情信息融合中所采用的数学模型及其算法。图1所示是空情信息融合处理软件的功能模块描述,其中所用到的算法在第3节中描述。
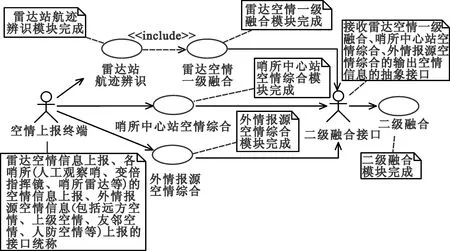
图1 空情信息融合处理软件功能描述图
图中,雷达站航迹辨识模块完成将雷达上报的空情信息自动分类编批,剔除虚假目标信息,从而减少信息传输量;外情报源空情综合模块接收外情报源空情信息(远方、上级、友邻、人防等空情信息)、对各类空情信息进行时空转换、航迹关联、状态估计,形成综合空情;哨所中心站空情综合模块接收来自各哨所(人工观察哨、变倍指挥镜、哨所雷达等)的空情信息、对空情信息进行空间坐标转换、对哨所雷达信息进行相关处理、并根据各哨所站的观察范围对空情进行统一编批;雷达空情一级融合模块接收雷达站航迹辨识模块完成的一次航迹、对各雷达空情信息进行时空配准、数据关联、目标状态估计等处理、形成统一的融合航迹;二级融合模块接收雷达空情一级融合模块、哨所中心站空情综合模块、外情报源空情综合模块的输出空情,对空情航迹进行数据关联、归一、重新编批、状态估计等处理,最终形成综合空情并上报。
考虑到防空指挥系统对快速反应能力和数据处理的实时性要求很高,该系统信息融合拟采用初始波门“最近邻”相关模型解决目标同一性问题,相关后采用自适应的卡尔曼滤波算法进行目标状态估计和状态更新,然后进行多源信息融合,采用镶嵌原理和最小二乘法进行融合航迹关联和状态更新,并采用一些工程简化算法以提高运算速度,如融合航迹状态估计中忽略参量间的互协方差,将三维数据分成3个一维数据来处理等。
3空情信息融合模型
3.1 目标相关(点航相关)
设系统为时不变且第i目标作匀速直线运动,描述目标运动的状态向量Xi(k)是空间直角坐标系下三维向量(x,y,h,vx,vy,vh),解耦后的目标状态方程和观测方程为
Xi(k+1)=φ(k+1,k)Xi(k),
(1)
Zi(k)=HXi(k)+νi(k)。
(2)
(3)
以此外推点为中心,构成相关域:

(4)
其中,

HPi(k/k-1)HT+Ri(k)=Bi(k)。
(5)

3.2 多源航迹关联
本文提出采用一种基于镶嵌原理的多信息源航迹关联方法。镶嵌原理,即指航迹处理中心中的首点抢报原则,即航迹处理中心,在收到某一单传感器(或其他信息源)上报的第一条航迹时,建立中心的首条融合航迹,然后把多信息源的航迹相关处理,转化为输入航迹与融合航迹的相关处理。当k时刻收到某站(或源)的空情数据时,外推当前所有的融合航迹状态为当前时刻,根据点-航关联或航-航关联的判断准则判断其相关性,若相关,则更新该融合航迹;若均不关联,则起始一新的准融合航迹。准融合航迹满足一定条件时转化为正式融合航迹。
利用相关质量数、新生质量数、脱离质量数来对航迹相关过程进行控制。当某站(或源)的航迹之于某融合航迹的相关质量等于3时,即将此航迹归一到该融合航迹上并建立对应关系。当某站(或源)送来带站号(或源号)的航迹数据时,检查相关表,找出与此航迹相对应的融合航迹,即可直接对融合航迹进行相关处理。如果某站(或源)航迹的新生质量等于3,则确认该航迹为新的融合航迹,赋予新的批号,并建立对应关系。在某站(或源)航迹与融合航迹已有对应关系的情况下,如果该输入航迹之于对应的融合航迹的脱离质量等于3,则撤消它们之间的对应关系,同时该输入航迹与其他融合航迹进行相关处理,并依处理结果建立新的对应关系。图2所示为多源航迹关联流程,其中,i表示第i个目标;k表示k时刻;j表示融合航迹j;z为k时刻传感器对空情信息的测量;Ri为坐标转换后的测量值;KN[Ri]表示传感器测量航迹i的新生质量数(3为新生、1不是新生航迹);KR[Rij]表示两航迹相关度(1为相关、0为不相关,-1为舍弃);KR[Ri]表示输入航迹与对应融合航迹j的相关质量数(3为相关);Kn[Ri]表示是否添加新航迹标识(若为1,max+1;若为0,max保持不变);max表示航迹总数。
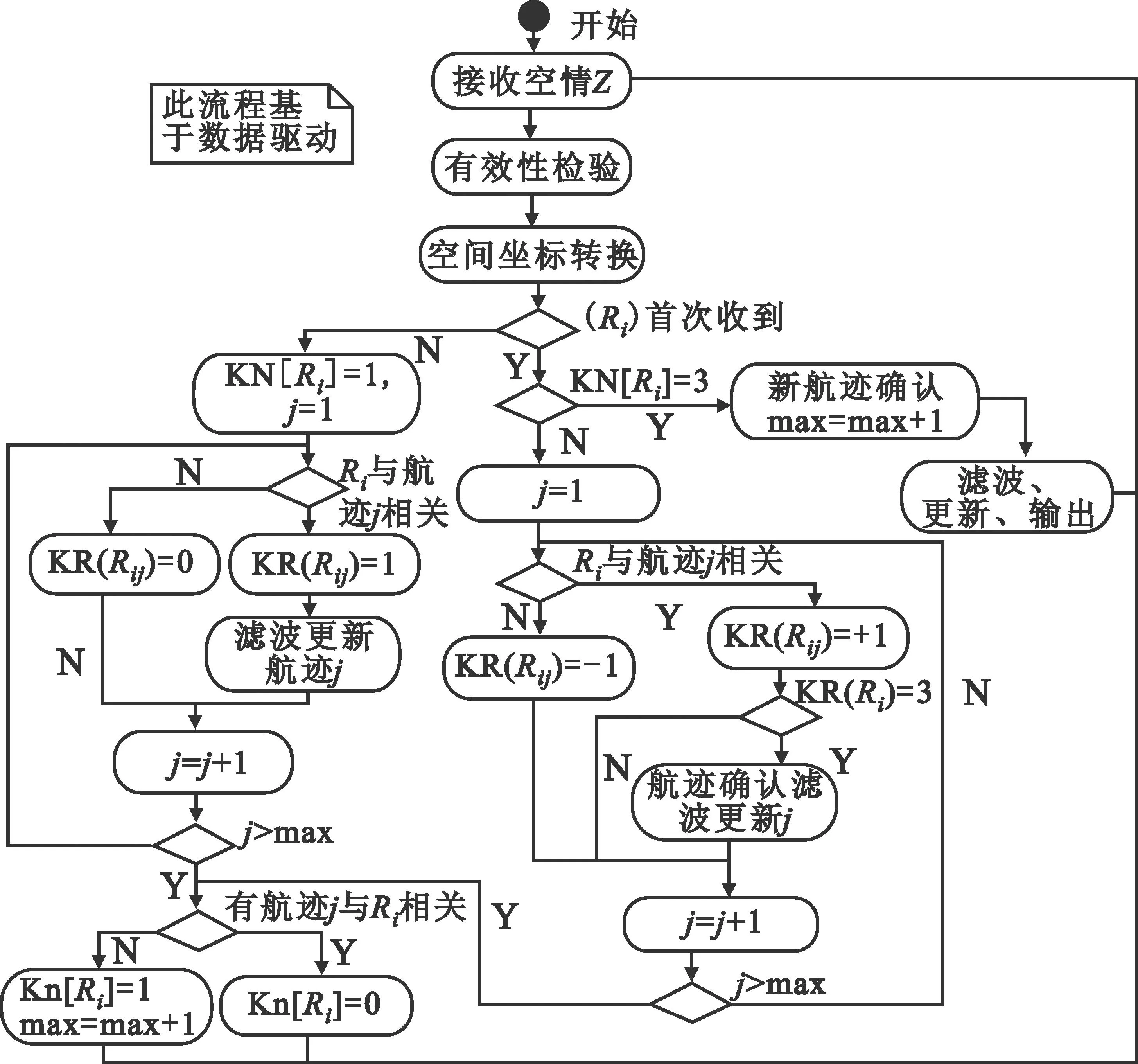
图2 多源航迹关联流程图
记两条航迹的航迹状态参数和状态方差为(x1,y1,h1,vx1,vy1,vh1,px1,py1,ph1,pvx1,pvy1,pvh1)、(x2,y2,h2,vx2,vy2,vh2,px2,py2,ph2,pvx2,pvy2,pvh2),因为航迹的状态参数近似服从正态分布,且各参数可视为相互独立,则可认为

对两关联航迹融合状态估计拟采用最小二乘状态更新方法[3-4],该方法在满足精度要求的情况下运算效率较高。
3.3 点航航迹互联总则
记所有已探测到的跟踪目标的集合为
(6)
(1)如果对于Ti∈T,均有Zi(k)不属于Ci(k),即测量点Zi(k)与任何目标都不相关,则Zi(k)有可能是虚警,也有可能是新目标的测量,还有可能是某一建立了航迹的目标的漏互联。暂存入自由点集,通过后续测量决定其取舍,其中Ci(k)为k时刻所有目标的点集;
(2)如果Zi(k)∈Ci(k)且Zi(k)均不属于其他目标的相关域,即量测点Zi(k)落在且只落在目标i的相关域内,则判定Zi(k)是航迹i的测量,并对航迹i进行滤波和更新处理;

3.4 自适应卡尔曼滤波
滤波是在航迹辩识后雷达一级融合处理进行的,一旦将测量集合按目标进行分类后,多目标跟踪问题就变成了多个单目标的跟踪问题。文献[5]提出带信息反馈德加权航迹融合算法,该方法计算过程复杂,处理效率低。文献[6]中提出采用联合卡尔曼滤波进行航迹融合,该方法计算效率高,但状态估计次优。本文提出自适应滤波器,以卡尔曼滤波作为基本滤波方法[1,7],目标机动所引起的偏差通过设计自适应滤波器来加以校正,既保证了最优的状态更新,又提高了计算效率。目标航迹状态更新自适应卡尔曼滤波公式[8]如下:
Pi(k|k-1)=φ(k,k-1)Pi(k-1)φT(k,k-1),
(7)
Ki(k)=Pi(k|k-1)H[HPi(k|k-1)HT+Ri(k)]-1,
(8)

(9)
Pi(k)=(1-Ki(k)H)Pi(k|k-1)。
(10)


(11)

(12)

HTPi(k|k-1)H+Ri(k)。
(13)



SiF(k|k-1)=Si(k-1)+ΔSi(k-1)Δt,
(14)
Si(k)=Si(k-1)+α[SiF(k)-Si(k|k-1)],
(15)
ΔSi(k)=ΔSi(k-1)+β/Δt[SiF(k)-Si(k|k-1)]。
(16)
式中,Δt=tk-tk-1,Si(0)=1,ΔSi(0)=0。对于不同范围的Δt选取不同的α、β,求出Si(k)后,令
作为调整后的外推方差代入卡尔曼滤波公式求机动目标状态的滤波值。
3.5 一次航迹编批原则
(1)一次航迹的编批由计算机自动完成,计算机只对正式航迹并按其建立的先后次序编批,批号依次用01、02、…、n来表示。当航迹撤消时,其相应的批号不再被其他新建立的航迹使用;
(2)航迹分岔时,分岔后的两支航迹一取原航迹批号,一赋以新批号,航迹批号确定方法如下:先出现的赋予原批号,后出现的赋予新的批号;
(3)合批:航迹合批以后的航迹批号沿用雷达先扫描到原航迹批号;
(4)分而后合:航迹先分后合,分岔后的两支航迹按第2条编批原则确定,为了不影响指挥员掌握空情,规定合批后的航迹统一采用分岔前航迹的批号;
(5)合而后分:规定合而后分的两支航迹采用合批前的原批号,而不采用新的批号。
3.6 融合航迹编批原则
(1)融合航迹的编批、航迹分岔、合批等情况的编批原则与一次航迹的编批原则相同;
(2)二级融合模块输出的目标批号为全局空情的最终批号。
实际空情千变万化,情况可能更为复杂,如一条航迹分岔为两条以上的航迹或两条以上的航迹合为一批等,但编批的基本原则不外乎以上所述几种情况。
4仿真试验结果
为了有效评估该融合模型的效能指标[10],在试验外场搭建了测试环境对基于该模型的某防空指挥系统融合处理软件实施测试,并通过MATLAB对记录数据进行分析评估[11]。
空情设计:3架敌机飞机按预定航线飞行,目标起飞后,同时到达进入点A。3架飞机到达A后分别沿1、2、3号航线飞行(B为分批点,E为合批点),到达E后目标转弯,以E为进入点沿原航线返回,到达B后退出。飞行试验布局、飞机飞行参数、航线投影及雷达布站如图3,其中雷达1、2、3和4均为警戒雷达,五角星为融合中心位置。为有效考核软件融合能力,设计有效航次不少于3个航次。
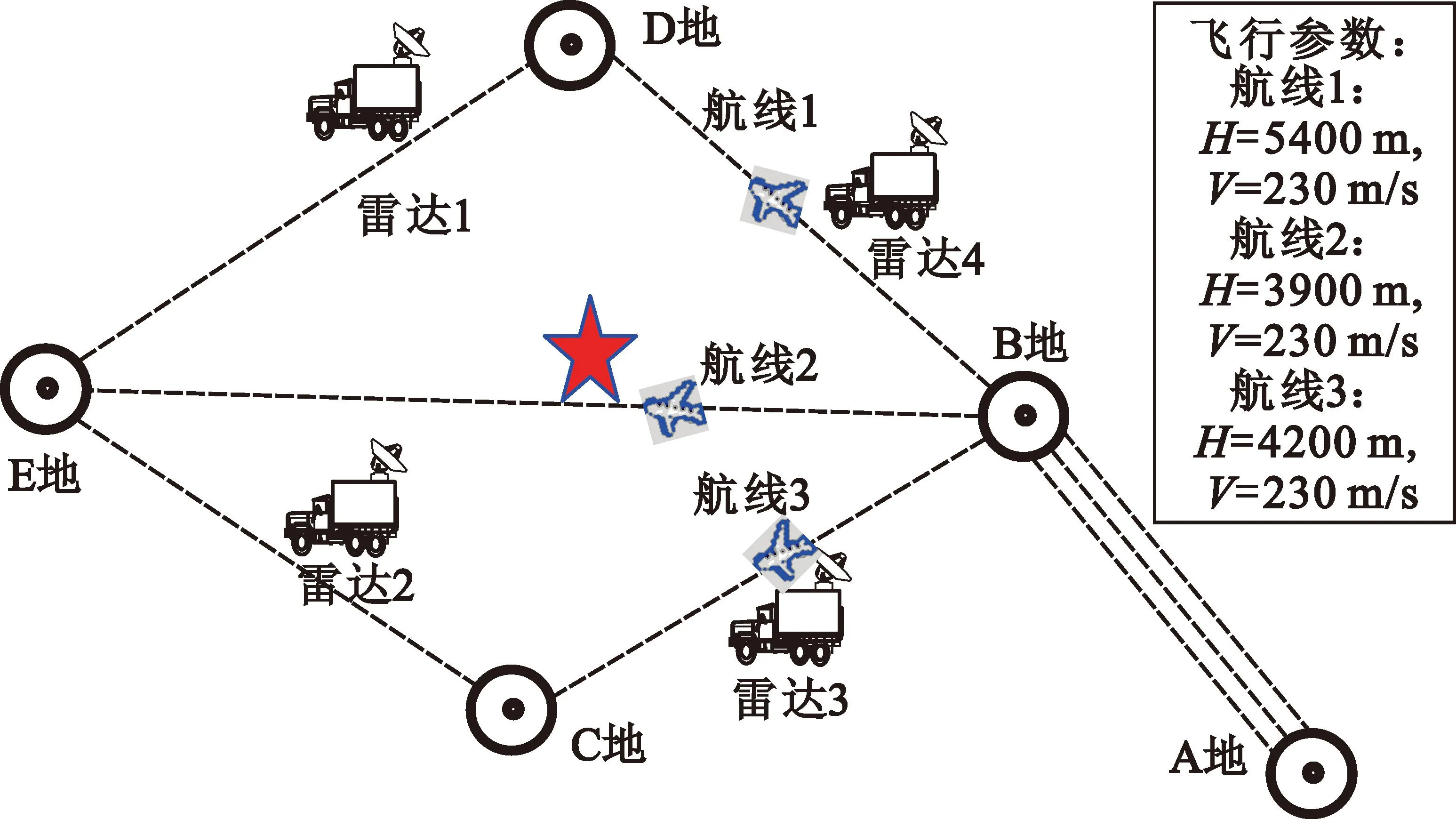
图3 雷达情报融合能力试验飞行航线投影图
下面介绍雷达空情融合能力评估[12]模型。
(1)对单个目标进行信息融合评估
假定ti时刻单个目标标准航迹为{xti,yti,hti},i=1,2,…,N,各传感器在同一时刻跟踪目标输出的航迹表示为{xtiM,ytiM,htiM},i=1,2,…,N,得到各传感器跟踪目标的均方根误差:
(17)
(18)
(2)对多个目标进行综合信息融合评估
假如本次雷达空情融合试验目标航迹总数为K个,而实际空情融合输出的目标航迹总数为K′个,则目标航迹同一性判断错误率为
(19)
对于同一性判断正确的目标,可以计算被试系统对目标航迹融合的综合指标。假定同一性判断正确的目标数为K,目标融合航迹个数为Nj,j=1,2,…,K,则对目标位置的综合均方根误差为
(20)
融合性能评估准则如下:对目标同一性判断错误率要小,即正确性航迹认定概率要高;对目标航迹位置均方根误差要小。
图4中(a)所示为测试飞行中GPS输出的真实目标航迹图,(b)和(c)所示为雷达1和2实时记录的探测目标航迹图。
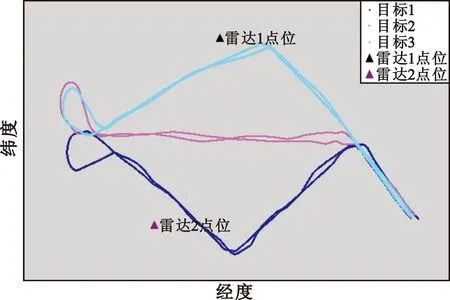
(a)GPS真实测量数据航迹
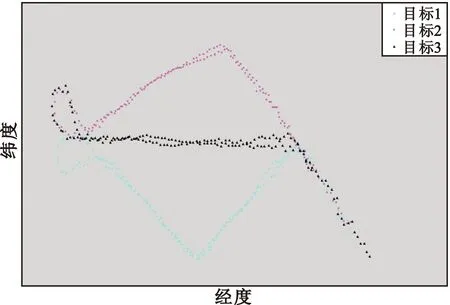
(b)雷达1探测目标航迹
(c)雷达2探测目标航迹
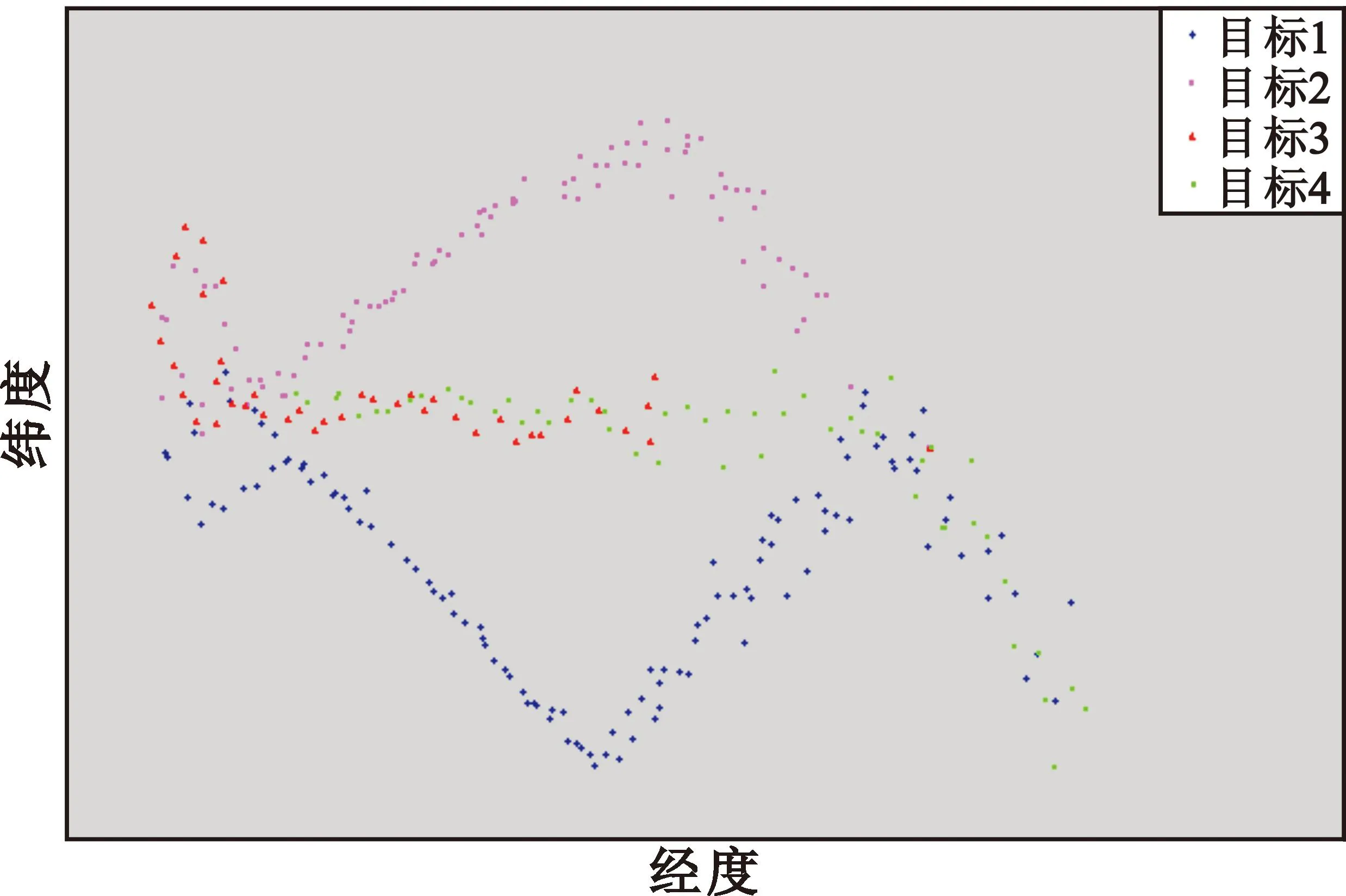
图5所示为被试系统雷达融合界面显示图,图6所示为被试系统记录的雷达融合后目标航迹图及融合后航迹与客观空情对照图,从图示比较分析可以看出,被试系统软件能够正确融合4部雷达输入的雷达空情,融合后航迹与真实空情航迹一致,虽然融合过程中出现重新编批,但所编新批航迹与真实空情航迹一致,且未出现单目标航迹输出分批现象。
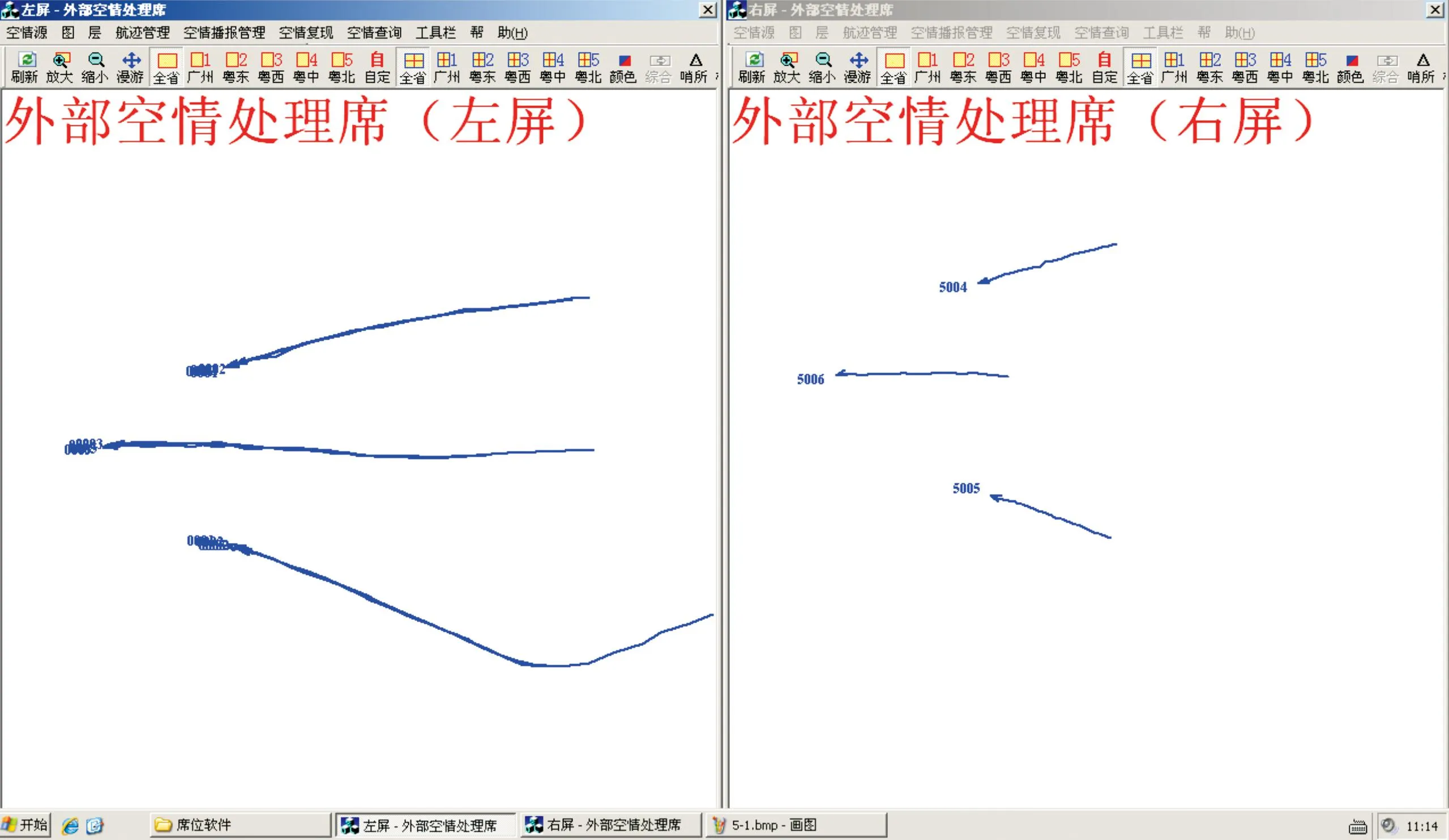
图5 被试系统雷达融合界面图
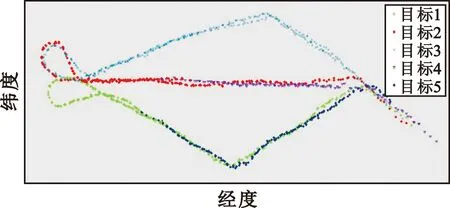
(a)被试系统融合后航迹复现
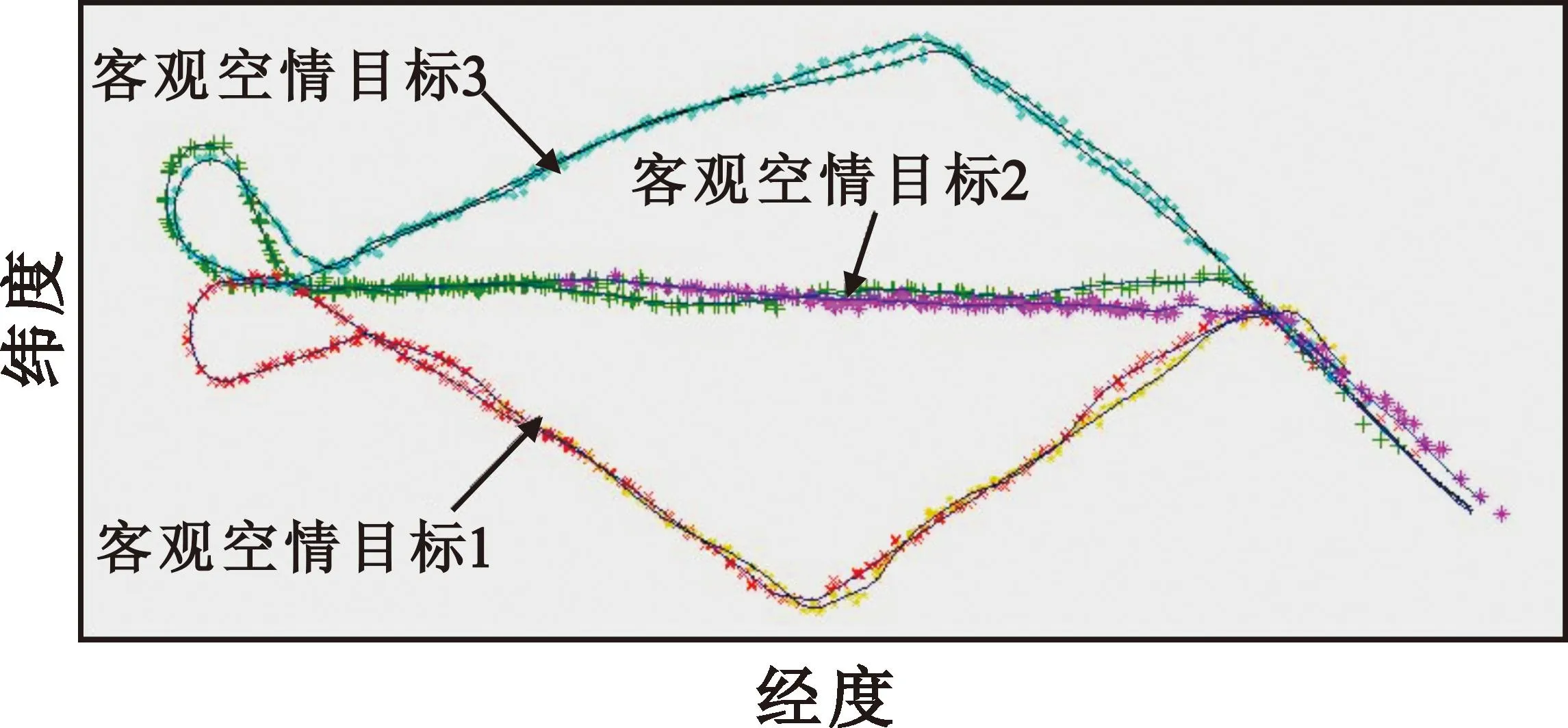
(b)被试系统融合后航迹与客观空情叠加
表1所示为基于评估模型处理单次的试验数据结果,表中R1、R2、R3和R4代表雷达1~4。此外,融合后x、y和h方向的目标位置均方根误差分别为10.84、10.10、12.79(目标1),12.48、13.88、15.01(目标2),11.96、10.81、13.07(目标3);x、y、h方向的目标位置综合均方根误差分别为3.429 2、3.405 3和3.676 9。表中雷达空情融合能力的量化指标目标位置综合均方根误差为3 m多,数值很小,融合后的精度明显优于单个传感器。由此得出结论,被试系统的雷达空情信息融合能力完全满足指标要求,融合性能优良。
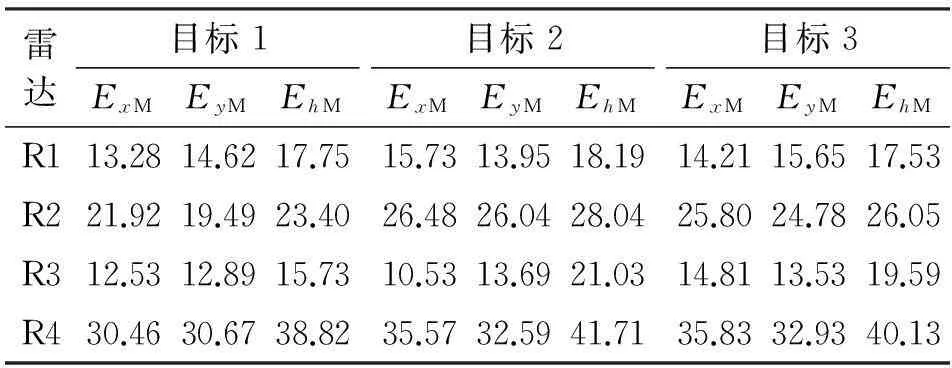
表1 雷达空情融合能力评估结果
5结束语
本文分析论述了防空指挥系统空情信息融合方法和软件结构组成,从提高系统快速反应决策和数据处理高实时性角度出发,提出了一种通用的多目标、多源空情信息融合简化模型算法,目前该模型已在某防空指挥系统中得到成功应用,具有一定的参考借鉴价值。但是随着现代战争的发展,特别是在广泛采用空间电磁对抗技术的情况下,防空指挥系统的各种传感器所获得的空情信息总夹杂着大量的干扰和欺骗信息,面对这些不确定、不精确、不完整甚至相互矛盾的数据信息,多传感器信息融合方法面临的挑战将会更加严峻,本文的方法不免会存在一些不足之处,比如在提高融合精度和融合正确率等方面还需在实际使用中进一步优化改进。
参考文献:
[1]何友,王国宏,关欣.信息融合理论及应用[M].北京:电子工业出版社,2010.
HE You,WANG Guohong,GUAN Xin.Information Fusion Theory and Application[M].Beijing:Publishing House of Electronic Industry,2010.(in Chinese)
[2]苏春梅,奚宏明,茅文浩.一种通用的空情信息融合仿真测试平台[J].微计算机信息,2012,11(1):35-38.
SU Chunmei,XI Hongming,MAO Wenhao.A common air situation data fusion simulation testing platform[J].Microcomputer Information,2012,11(1):35-38.(in Chinese)
[3]曾飞棚.多传感器信息融合的目标跟踪算法研究[J].中国西部科技,2010,40(15):151-159.
ZENG Feipeng.Data Combination and Track Prediction by Multiple Sensors[J].Science and Technology of West China,2013,40(3):151-159.(in Chinese)
[4]雷雨,冯新喜,朱灿彬,等.基于测距最小二乘的方位融合多传感器定位算法[J].电光与控制,2012,19(1):12-17.
LEI Yu,FENG Xinxi,ZHU Canbin,et al.LI Binbin.An Azimuth Fusion Locating Algorithm Based on Range-Only Least Squares for Multi-Senor Network[J].Electronics Optics&Control,2012,19(1):12-17.(in Chinese)
[5]张伟,王泽阳,张可.基于多模型航迹质量的融合算法[J].计算机科学,2013,40(2):64-70.
ZNANG Wei,WANG Zeyang,ZHANG Ke.Track-to-track Fusion Algorithm Based on Track Quality with Multiple Model[J].Computer Science,2012,3(2):17-22.(in Chinese)
[6]邵伟,孟秋池,龚丹丹.多传感器数据融合与航迹预测[J].数学的实践与认识,2010,40(15):151-159.
SHAO Wei,MENG Qiuchi,GONG Dandan.Data Combination and Track Prediction by Multiple Sensors[J].Mathematics In Practice And Theory,2010,40(15):151-159.(in Chinese)
[7]Chen Yukun,Si Xicai,Li Zhigang.Research on Kalman-filter based multisensor data fusion[J].Journal of Systems Engineering and Electronics,2007,18(3):497-502.
[8]张波雷,许蕴山,夏海宝.基于小波变换的异类传感器机动目标的模糊航迹关联[J].电讯技术,2012,52(10):151-159.
ZHANG Bolei,XU Yunshan,XIA Haibao.Maneuvering Targets Fuzzy Tracks Correlation of Heterogeneous Sensor Based on Wavelet Transform[J].Telecommunication Engineering,2013,40(3):1624-1627.(in Chinese)
[9]李树军,司敬国.基于多传感器信息融合的多目标跟踪与仿真研究[J].青岛大学学报(工程技术版),2008,23(2):32-36.
LI Shujun,SI Jingguo.Research on Multiple Targets Tracking Using Information Fusion Based on Sensors and Simulation[J].Journal of Qingdao University(E&T),2008,23(2):32-36.(in Chinese)
[10]缪彩练,南建设,郭娜.基于多源数据融合技术的情报侦察系统效能评估体系[J].电讯技术,2012,52(4):429-433.
MIAO Cailian,NAN Jianshe,GUO Na.Effectiveness Evaluation Architecture for Intelligence Reconnaissance System Based on Multi-source Data Fusion Technique[J].Telecommunication Engineering,2012,52(4):429-433.(in Chinese)
[11]王晓璇.目标融合航迹质量评估方法[J].指挥信息系统与技术,2012,3(2):17-22.
WANG Xiaoxuan.Evaluation Method for Track Quality of Target Fusion[J].Command Information System and Technology,2012,3(2):17-22.(in Chinese)
[12]Wang Xiaoxuan,Wang Weimin,Diao Lianwang.Research and Implementation of a Testing Method in Target Tracking Based on Multi-Radar Information Fusion[C]//Proceedings of 2011 International Conference on Computer Science and Information Technology.Chengdu:IEEE,2011:272-277.
苏春梅(1979—),女,宁夏银川人,2009年获工学硕士学位,现为工程师,主要研究方向为仿真测试技术及应用;

SU Chunmei was born in Yinchuan,Ningxia Huizu Autonomous Region,in 1979.She received the M.S. degree in 2009.She is now an engineer.Her research concerns simulation test technique and application.
Email:su_chun_mei@163.com
何剑伟(1967—),男,江苏泰州人,硕士,高级工程师,主要研究方向为系统总体设计;
HE Jianwei was born in Taizhou,Jiangsu Province,in 1969.He is now a senior engineer with the M.S. degree.His research direction is system design.
李永刚(1975—),男,陕西西安人,硕士,高级工程师,主要研究方向为系统总体设计;
LIYonggang was born in Xi′an,Shaanxi Province,in 1975.He is now a senior engineer with the M.S. degree.His research direction is system design.
郭力兵(1978—),男,湖北武汉人,硕士,工程师,主要研究方向为计算机应用。
GUO Libing was born in Wuhan,Hubei province,in 1978.He is now an engineer with the M.S. degree.His research direction is computer application.
