基于嫦娥二号数据的高分辨率影像拼接方法研究
2016-01-26杨一曼牟伶俐刘建军曾兴国刘宇轩邹小端李春来
杨一曼,牟伶俐,刘建军,曾兴国,刘宇轩,邹小端,李春来
(1. 中国科学院国家天文台,北京100012; 2. 中国科学院大学,北京100049;
3. 中国科学院月球与深空探测重点实验室,北京100012)
A Fast Mosaicing Method of High Resolution Image Based on Chang’E 2 data
YNAG Yiman,MU Lingli,LIU Jianjun,ZENG Xingguo,LIU Yuxuan,ZOU Xiaoduan,LI Chunlai
基于嫦娥二号数据的高分辨率影像拼接方法研究
杨一曼1,2,牟伶俐1,3,刘建军1,3,曾兴国1,3,刘宇轩1,3,邹小端1,3,李春来1,3
(1. 中国科学院国家天文台,北京100012; 2. 中国科学院大学,北京100049;
3. 中国科学院月球与深空探测重点实验室,北京100012)
A Fast Mosaicing Method of High Resolution Image Based on Chang’E 2 data
YNAG Yiman,MU Lingli,LIU Jianjun,ZENG Xingguo,LIU Yuxuan,ZOU Xiaoduan,LI Chunlai
摘要:以嫦娥二号(CE-2)DOM数据为几何纠正和色调调整底图,采用SIFT自动匹配算法实现影像精纠正,并提出一种基于直方图匹配思想的线性变换色调调整方法,最终完成嫦娥三号(CE-3)着陆区高分辨率窄角相机(LROC-NAC)影像快速拼接,为着陆点周围的地形地貌和地质构造综合分析提供数据。结果表明,该方法解决了LROC-NAC高分辨率影像快速拼接关键问题,实现了色调连续、纹理清晰、地物完整的拼接效果,具有较高的应用价值。
关键词:着陆区高分辨率窄角相机(LROC-NAC);嫦娥二号(CE-2);嫦娥三号(CE-3);几何纠正;色调调整;拼接;高分辨率影像
一、引言
嫦娥三号(CE-3)于2013年12月14日21时11分在月面首次实现软着陆[1]。着陆区位于月球雨海(mare imbrium)西北部的虹湾(sinus iridum)地区[2-3]。嫦娥二号(CE-2)虽然实现了着陆区7 m分辨率影像全覆盖和1.5 m分辨率影像部分覆盖,但是为了综合分析着陆点周围的地形地貌和地质构造特点,需要收集和拼接国外着陆区高分辨率窄角相机(lunar reconnaissance orbiter camera,narrow angle camera,LROC-NAC)等更高分辨率数据作为补充。由于LROC-NAC在不同时间的成像条件(如轨道高度、太阳高度角和方位角等)不尽一致,导致着陆点区的LROC-NAC影像在定位、分辨率、色调等方面存在较大差异,无法直接拼接。为了满足上述需求,LROC-NAC影像需要经过几何纠正和色调调整,最后进行无缝拼接。
影像自动几何纠正方法适合批量数据的定位,能够克服人工几何纠正法费时、费力、效率低下的缺点,其关键之处在于通过匹配算法获取影像控制点[4]。影像匹配算法主要包括基于影像的灰度和特征进行匹配[5-6]。基于灰度影像匹配研究最早,常用方法有相关系数匹配和最小二乘匹配等,但是在同名点处如果影像的灰度强度变化较大或附近相似地物较多时,其匹配的效率和准确度将大大降低[7]。由于LROC-NAC影像之间光照反差较大且纹理特征较为相似,导致此方法不适合同名点的匹配。基于特征匹配算法是比较影像中特征之间的相似性实现同名点提取的方法,目前常用的匹配算法包括Moravec、SURF、SIFT、Forner和SUSAN等[8-10]。
由于月表地物的几何形状等特征基本不受外在影响,图像色调和纹理具有较大的相似性,因此该方法能较好地适用于月球影像的同名点匹配。其中李春来[11]、尹永会[12]等分别利用嫦娥一号和二号的影像,采用SIFT[13-14]算法实现了对同名点的快速匹配。由于LROC-NAC影像之间存在明显的色调差异,为了保证影像色调的一致性,需要对LROC-NAC影像进行色调调整。目前主要的图像颜色调整方法包括线性变换、方差均值、直方图匹配、信息熵等[15]。线性变换是指影像变换函数是线性的,其本质是按比例对灰度值进行线性拉伸,实现对影像整体亮暗的调整。该方法对灰度分布简单的影像处理比较有效,对较为复杂的情况效果欠佳,容易引起变换后的颜色畸变[16]。方差均值法是以参考影像的灰度均值和方差作为标准,通过调整影像,使其灰度的均值和方差与参考影像接近。但是在影像色调差异较大时,该方法一次调整往往难以奏效[17]。直方图匹配法是以参考影像的直方图为参照,使待调整影像的直方图尽可能服从参考影像的直方图。如果参考影像的灰度变化范围小于待处理影像灰度范围时,会出现无法匹配的情况[18]。信息熵法是根据相邻影像重叠区域平均信息量应相同,通过熵映射方法消除影像间色调差异,该方法适用于同源影像且影像重叠区域较大。由于月球表缺乏植被、大气等外在因素的影响,其表面反射率几乎没有变化,因此同一地物影像色调较为相似,只是明暗程度取决于光照条件。针对这一特点,本文提出了基于直方图匹配思想的线性变换方法实现影像色调调整。
为了达到LROC-NAC影像快速拼接的目的,本文提出利用1.5 m的CE-2高分辨率DOM作为几何定位参考,全覆盖7 m的CE-2高分辨率DOM作为属性(色调)参考的思想实现对LROC-NAC影像的拼接:首先根据LROC-NAC索引文件提供的坐标数据对影像进行几何粗纠正(初定位),再以CE-2的1.5 m分辨率DOM为底图,采用SIFT算法实现LROC-NAC影像的自动匹配,进行影像几何精纠正。同时以CE-2的7 m分辨率DOM为色调基础,采用基于直方图匹配思想的线性变换方法实现LROC-NAC影像色调调整;最后在确保地物完整性的前提下完成着陆区高分辨率影像的无缝拼接。
二、着陆区介绍
1. CE-3预选着陆区介绍
CE-3预选着陆区位于雨海西北部的虹湾地区,覆盖范围包括:42.6°N~45.6°N,18.2°W~34.6°W;南北长约91 km,东西宽约356 km。预选着陆区平均坡度为2.22°,标准差为3.16°,整体地势平坦,起伏度较小。在影像图上,东部地区为地质年龄属较轻的爱拉托逊纪,色调较深;西部地区为较老的雨海
纪, 色调较浅。整体上预选着陆区的影像色调较为平滑(如图1所示)。图中矩形为CE-3预选着陆区,五角星为CE-3软着陆点,东侧色调较亮的影像为软着陆点所在CE-2的1.5 m分辨率DOM[2,19]。

图1 预选着陆区CE-2影像图
2. 虹湾预选着陆区高分辨率数据覆盖
目前虹湾地区覆盖的高分辨率遥感影像包括CE-2的7 m与1.5 m分辨率DOM和最高分辨率可达0.4 m的LROC-NAC影像,具体为:

图2 虹湾预选着陆区1.5 m影像覆盖图
1) 嫦娥二号DOM包括:由25轨7 m分辨率影像数据经过预处理、全球平差、影像匹配、正射纠正和拼接而成的全覆盖DOM(如图1所示);由32轨1.5 m分辨率影像数据经过上述处理后拼接而成的部分覆盖DOM,覆盖率为66.03%,如图2所示,矩形为CE-3预选着陆区。其中向左倾斜的影像为第1次覆盖;向右倾斜的影像为第2次覆盖,五角星为CE-3软着陆点。以上数据采用8 bit存储,DN值最大为255。2) LROC-NAC影像:美国月球轨道探测飞行器(LRO)上搭载的全色窄角相机(中心波长550 nm)主要为小尺度地貌成像探测、载人登月和月球基地选择,以及月面行驶路径规划提供重要数据[20-21]。截至2014年1月,在CE-3预选着陆区NASA共发布了783景影像,其中分辨率为0.4~0.5 m、0.5~1.0 m和1.0~2.0 m的数据分别为58景、272景、453景,整体覆盖率为99.26%(如图3所示)。以上数据采用16 bit存储,查询在本地区收集的数据,其DN值范围是0~4500。

图3 LROC-NAC影像在预选着陆区内不同分辨率分布图
通过对虹湾预选着陆区高分辨率数据覆盖分析可知,CE-2的7 m 分辨率DOM色调统一、纹理清晰、覆盖完整;1.5 m分辨率DOM覆盖率为66.03%,影像呈“N”字形分布,为了保证着陆区影像的连续性,需要利用同等分辨率数据进行补充;LROC-NAC几乎实现全覆盖,可以弥补CE-2的1.5 m分辨率影像的空缺。
三、拼接算法与流程
1. 拼接算法研究
(1) 几何纠正算法
为了实现对LROC-NAC影像的精纠正,首先需要明确其在CE-2影像上的大致位置。本文利用LROC-NAC索引文件为每景影像提供的4个角点和中心点的坐标,对其进行粗纠正,实现初步定位。
在精纠正中为了获取影像和CE-2参考底图的控制点,本文采用SIFT算法对LROC-NAC影像和CE-2的1.5 m分辨率影像以16像素×16像素大小窗口为基准,构建128维SIFT特征向量。最后采用最邻近法查找每一个特征点在另外一幅影像中的最邻近,进行特征点匹配,匹配的结果为待定控制点。
在实际的几何精纠正中,本文为了克服CE-2的1.5 m 分辨率DOM空白区无控制点的缺陷,也将纠正完的LROC-NAC作为控制底图,即优先利用SIFT算法匹配两边和CE-2底图均有重叠的LROC-NAC影像,经过几何精纠正后,此LROC-NAC影像视为控制底图,以弥补CE-2底图空白。经过以上步骤,最终实现了对所有LROC-NAC影像的几何精纠正。
(2) 色调调整算法
通过对单幅LROC-NAC影像的灰度分布分析,结果显示其灰度属于单峰值简单分布,且图像内色调变化不大。对同一地区影像分析,影像间色调差异明显,直方图的峰值不尽相同。其主要原因在于影像获取时的太阳高度角、探测器姿态角不尽相同。
根据上述特点和图像色调调整方法的适应性分析,本文采用线性变换对LROC-NAC影像进行色调调整。为了求解线性变换参数,考虑到LROC-NAC影像纹理和灰度分布与底图的相似性,本文提出基于直方图匹配思想构建线性变换参数求解方法。由于CE-2的7 m分辨率DOM在着陆区实现了全覆盖,色调连续平滑,本文以其作为色调调整参考影像。该模型首先求取DOM每一灰度值的累计百分比,然后获得相同累计百分比下待调整影像(LROC-NAC)对应的灰度值,再利用相同累计百分比对应的两影像灰度值构建线性调整函数,最后利用以上函数实现对LROC-NAC色调的调整。如图4所示,色调调整以M1116664800RC影像和CE-2对应区域的7 m分辨率影像为例。图4中,(a)为统计的各影像相同累计百分比所对应的灰度值;(b)为利用相同累计百分比所对应的灰度值点对,并求线性调整函数参数a、b值(如(c)所示);(d)为利用上述线性函数对M1116664800RC进行色调初步调整。经过上述调整后的LROC-NAC影像灰度范围由0~4500变为0.0~255.0附近。为了保持影像细节(即辐射分辨率),需要对调整后的影像进行拉伸,并用16 bit存储。为了保证拉伸后影像的整体色调保持一致,本文采取控制影像灰度均值的方式实现。通过试验,本文取k=1000作为调整后影像的灰度平均值,拉伸公式为
y=k(ax+b)/mean
(1)
式中,a、b为线性调整函数参数;k为影像调整后的灰度均值1000;mean为初步调整影像的灰度均值。
(3) 影像无缝拼接算法
经过几何纠正和色调调整后的LROC-NAC影像,如果直接进行拼接,通过分析可以看出图像在接边处有明显的拼接线。其主要原因在于色调调整算法不可能将图像接边处的色调完全调成一致,另外由于光照原因,如接边处的撞击坑在上午和下午其阴影完全不一致,无法通过色调调整实现平滑接边。为此,本文以尽量避开破坏撞击坑的完整性为原则,采用勾画拼接线的形式,利用离拼接线的长度为羽化权重实现影像的无缝平滑拼接。
2. 拼接流程设计
基于以上关键算法,本文实现对LROC-NAC影像的拼接,流程如图5所示。

图5 LROC-NAC影像拼接流程图
1) 数据收集:包括7 m和1.5 m分辨率CE-2的DOM,用作几何和色调调整底图;NASA发布的LROC-NAC影像和索引数据 (见http:∥lroc.sese.asu.edu/data/)。
2) 几何纠正:包括粗纠正和精纠正。首先利用索引文件提供的影像角点坐标初步定位整影像的位置;再利用SIFT算法实现LROC-NAC和CE-2的1.5 m 影像同名点匹配和精纠正。
3) 色调调整:首先根据几何精纠正结果,裁剪出相同区域CE-2的7 m分辨率DOM,用作色调调整的底图;再采用前文算法建立色调调整函数,实现对LROC-NAC影像的色调调整。
4) 影像拼接:手动选择相邻影像的拼接线,尽量保持撞击坑的完整性,实现对影像的无缝拼接。
四、LROC-NAC影像拼接与结果分析
1. 影像拼接
1) 数据收集。以陆点位置(19.51°W,44.12°N)向东西方向各扩展1.5°收集4轨(235、2745、236、2746)1.5 m分辨率的CE-2影像、7 m分辨率的CE-2影像和47景LROC-NAC影像。
2) 几何纠正。根据NASA提供的5个点坐标信息,在ENVI/IDL环境中利用ENVI_REGISTER_DOIT函数对LROC-NAC影像实现批量几何粗纠正;然后在Matlab中采用SIFT算法,将粗纠正结果与CE-2的1.5 m分辨率DOM及精纠正LROC-NAC影像进行同名点匹配,并利用三次多项式和卷积采样方式实现对LROC-NAC影像的几何精纠正。如图6所示,(a)为CE-2的1.5 m影像与M183661683RC(分辨率1.567 m)影像匹配结果,共匹配156个特征点,匹配正确率为100%;(b)为CE-2的1.5 m影像与M1116664800RC(分辨率为1.098 m)匹配结果,共匹配101个特征点,匹配正确率为87.1%。匹配错误主要是由于两幅影像的分辨率不同导致,本文采用RANSAC(random sample consecsus)鲁棒方法,经过几何一致性检验,剔除错误匹配点。
3) 色调调整。为了确保LROC-NAC影像色调与CE-2的7 m分辨率DOM的一致性,首先根据精纠正结果,提取出相同覆盖区域CE-2的7 m分辨率DOM。在IDL环境中采用前文算法,逐个对47景影像的线性函数参数进行解算,并利用函数对47景影像进行批量色调调整。
4) 影像拼接。由于LROC-NAC影像本身存在过度曝光或阴影过重问题,经过色调调整后有的影像效果不理想,在保证所选区域完全覆盖的前提下,对这类数据进行剔除,本文最终选择41景影像进行拼接。为了克服光照不一致和图像边缘地物的不完整性,确保降落区LROC-NAC影像的无缝连续镶嵌,拼接时采用手工方式选择拼接线。拼接线沿着地物的边界,禁止穿过地物的中间,并采用10个像素作为羽化范围,最终实现对影像的无缝拼接,拼接结果如图7所示。
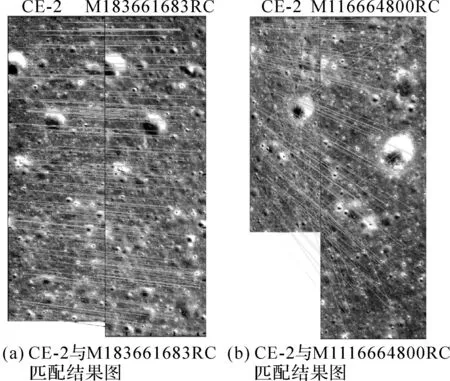
图6
2. 结果分析
图7(a)为CE-3着陆区CE-2的7 m分辨率DOM,色调较深的为地形较为平坦的区域,亮度较强的为环形坑坑壁和外沿部分;(b)为未经过色调调整的LROC-NAC影像经过几何精确纠正后拼接的结果,可以看出图像之间色调变化较大,且存在明显的拼接线;(c)为经过色调调整后且剔除质量较差影像的LROC-NAC拼接结果,整体上去除了色调差异,色调连续、纹理清晰、地物完整,可以明显地分辨出月海区的环形撞击坑和坑壁处的较大石块。
对色调调整前后拼接影像的直方图进行分析,如图8所示。未经色调调整的拼接影像灰度分布较为复杂(如图8(a)所示),与相同地区的CE-2影像对比分析,差异较大(如图4(d)所示);而经过色调调整后的拼接影像灰度分布(如图8(b)所示)为单峰,其分幅与参考底图CE-2影像灰度分布具有很高的相似性。上述分析表明,本文提出的LROC-NAC影像拼接方法较好地解决了多时相LROC-NAC影像的几何纠正、色调调整和无缝拼接问题。

图7
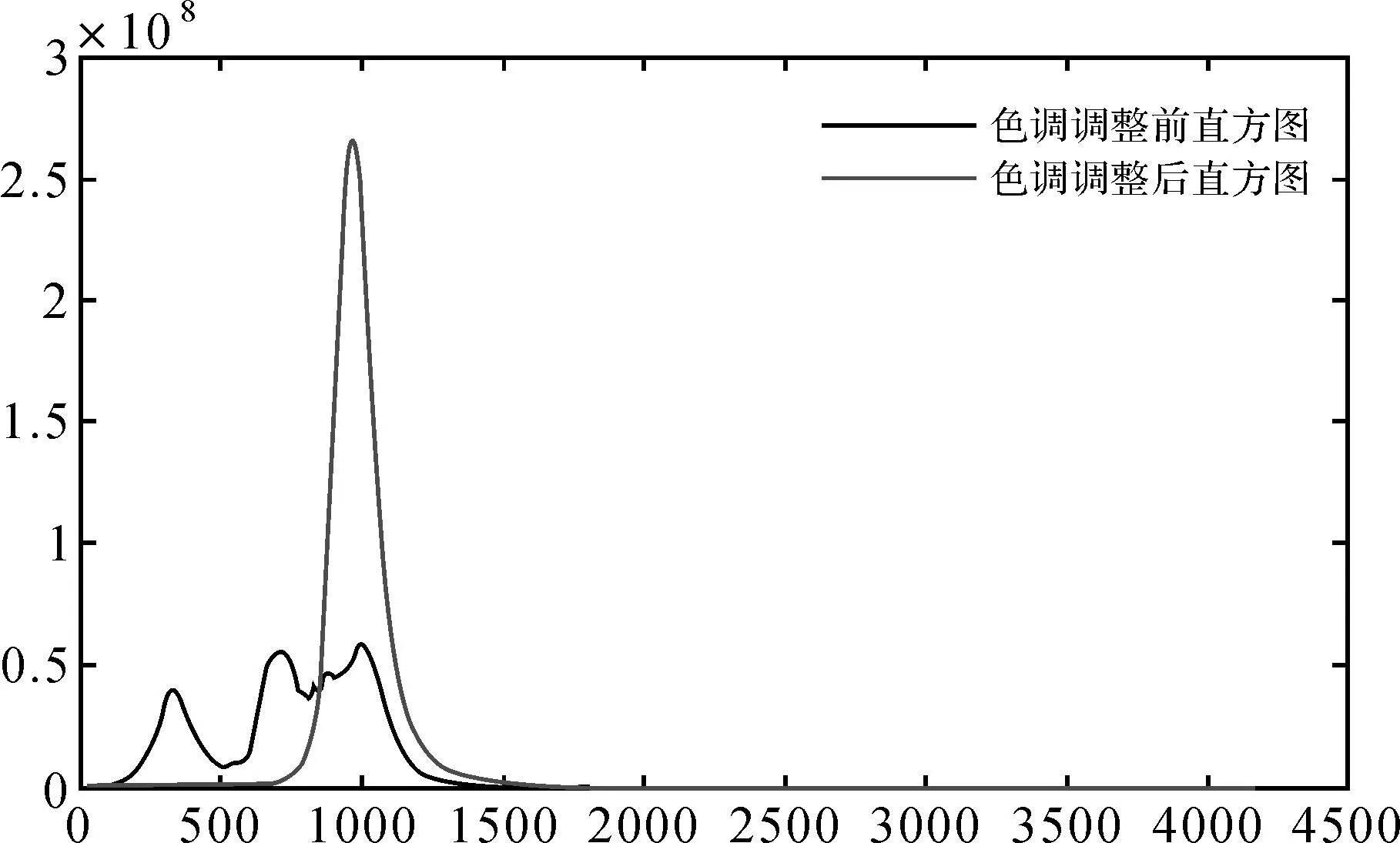
图8 色调调整前后直方图对比
五、结束语
本文根据LROC-NAC数据特点,提出以CE-2的1.5 m分辨率DOM为几何纠正底图、以CE-2的7 m分辨率DOM为色调调整底图的思想,将几何纠正和色调调整分开,充分利用不同数据的特点,弥补数据不足的缺陷,为月球高分辨率影像无缝镶嵌提供了切实可行的解决方案。本文采用的SIFT算法和基于直方图匹配思想建立的线性色调调整方法,较好地解决了LROC-NAC影像拼接中几何定位和色调调整关键问题,结果表明拼接图色调连续、纹理清晰、地物完整。本方法适合批量的月球高分辨率影像快速拼接,为以后嫦娥四号/五号着陆区影像拼接提供了技术支持。虽然在影像拼接过程中采用手动方式提取拼接线,可以较好地保证地物的完整性和影像的无缝镶嵌,但是未能实现影像全自动无缝镶嵌,这将是今后研究中需要完善的问题。
参考文献:
[1]欧阳自远. 我国月球探测的总体科学目标与发展战略[J]. 地球科学进展, 2004, 19(3): 351-358.
[2]陈圣波, 孟治国,崔腾飞,等. 虹湾地区月球卫星遥感地质解析制图[J]. 中国科学, 2010, 40(11),1370-1379.
[3]SCHABER G G. Geologic Map of the Sinus Iridum Quadrangle of the Moon, I-602 (LAC-24)[R]. Washington DC: US Geological Survey, 1969.
[4]张登荣,蔡志刚,俞乐.基于匹配的遥感影像自动纠正方法研究[J].浙江大学学报:工学版,2007,41(3):402-406.
[5]耿则勋,张保明,范大昭.数字摄影测量学[M] .北京:测绘出版社,2010.
[6]ZITOVA B,FLUSSER J.Image Registration Methods: a Survey[J].Image and Vision Computing, 2003,21(11):977-1000.
[7]何钰.基于月面CCD影像和激光测高数据的月球形貌测绘技术研究[D].郑州:信息工程大学,2012.
[8]SMITH S M, BRADY J M. SUSAN-A New Approach to Low Level Image Processing[J]. International Journal of Computer Vision,1997,23(1):45-78.
[9]BAY H,ESS A,TUYTELAARS T,et al. SURF:Speeded up Robust Features[C]∥Proceedings of ECCV.[S.l.]:Springer,2006.
[10]吴凡路,刘建军,任鑫,等. 嫦娥三号全景相机图像全景镶嵌方法的研究[J]. 光学学报, 2014, 34(9): 0915001.
[11]李春来.嫦娥一号三线阵CCD数据摄影测量处理及全月球数字地形图[J].测绘学报,2013,42(6):853-860.
[12]尹永会.嫦娥二号CCD影像DEM提取方法及月表地形分析初步研究[D].成都:成都理工大学,2013.
[13]LOWE D G. Object Recognition from Local Scale-invariant Features[C]∥Proceeding of the International Conference on Computer Vision.Corfu, Greece:IEEE,1999.
[14]LOWE D G. Distinctive Image Features from Scale-invariant Key Points[J]. International Journal of Computer Vision,2004,60(2):91-110.
[15]袁金国. 遥感图像数字处理[M]. 北京: 中国环境科学出版社, 2006.
[16]李治江.彩色影像色调重建的理论与实践[D].武汉:武汉大学,2005.
[17]易尧华,龚健雅,秦前清.大型影像数据库中的色调调整方法[J].武汉大学学报:信息科学版,2003,28(3):311-314.
[18]汪志云,黄梦为.基于直方图的图像增强及其MTALAB实现[J].计算机工程与科学,2006,28(2):54-56.
[19]GONG X, JIN Y Q. Diurnal Physical Temperature at Sinus Iridum Area Retrieved from Observations of Chinese Chang’E-1 Microwave Radiometer[J]. Icarus, 2012, 218(2): 807-816.
[20]KELLER J.LRO Instrument Suite and Measurements[C]∥AIAA Annual Technical Symposium(ATS).Houston: AIAA,2006.
[21]VONDRAK R,KELLER J,CHIN G,et al.Lunar Reconnaissance Orbiter(LRO):Observations for Lunar Exploration and Science[J].Space Science Reviews,2010,150(1-4):7-22.
引文格式: 杨一曼,牟伶俐,刘建军,等. 基于嫦娥二号数据的高分辨率影像拼接方法研究[J].测绘通报,2015(1):115-120.DOI:10.13474/j.cnki.11-2246.2015.0024
通信作者:牟伶俐。E-mail: mull@bao.ac.cn
作者简介:杨一曼(1989—),女,硕士生,主要从事月球穹窿,月球影像数据处理方面的工作。E-mail: yangym@bao.ac.cn
基金项目:青年科学基金(41401509);中国科学院国家天文台青年人才基金
收稿日期:2014-10-08
中图分类号:P237
文献标识码:B
文章编号:0494-0911(2015)01-0115-06
