全景地图隐私信息处理的关键技术研究
2016-01-26李海亭李艳红彭清山
李海亭,李艳红,彭清山,王 闪
(1. 武汉市测绘研究院,湖北 武汉 430022; 2. 精密工程与工业测量国家测绘地理信息局
重点实验室,湖北 武汉 430022; 3. 武汉大学资源与环境科学学院,湖北 武汉430079)
Research on Privacy Information Hiding in Panoramic Map
LI Haiting,LI Yanhong,PENG Qingshan,WANG Shan
全景地图隐私信息处理的关键技术研究
李海亭1,2,李艳红3,彭清山1,2,王闪1,2
(1. 武汉市测绘研究院,湖北 武汉 430022; 2. 精密工程与工业测量国家测绘地理信息局
重点实验室,湖北 武汉 430022; 3. 武汉大学资源与环境科学学院,湖北 武汉430079)
Research on Privacy Information Hiding in Panoramic Map
LI Haiting,LI Yanhong,PENG Qingshan,WANG Shan
摘要:全景地图系统在数据生产中存在一些可能涉及泄漏个人隐私的信息。本文提出了通过采用特征提取和监督学习分类的方法来检测和处理隐私信息的方法。以人脸和车牌号为例,分别采用支持向量机和投影定位的方法进行了隐私信息定位检测。试验证明,该方法具有较好的可行性。
关键词:全景地图;隐私信息;特征提取;监督分类;目标检测
一、引言
全景地图技术是一种由全景技术与电子地图发布技术相结合的、可定位展示真实场景的虚拟现实技术,是目前在全球范围内迅速发展并逐步流行的一种视觉新技术[1]。全景地图主要采用360°全景浏览的方式展示空间信息。在全景数据的采集过程中,往往包含了较多可能涉及泄漏个人隐私的信息,如人脸、车牌号等。目前,围绕空间数据安全开展了大量的数字水印技术研究[2-4],在空间数据的版权保护、使用跟踪、内容认证等方面发挥了很好的作用,但仍无法满足全景地图中某些特定隐私信息的保护。如何将这些隐私信息进行自动识别和保护是全景地图系统数据处理的一项重要任务。
二、隐私信息特征提取与定位
隐私信息检测一般包括数据预处理、特征提取、样本学习和目标检测4个过程。其中,特征提取是隐私信息定位的关键技术,选取的特征直接影响到目标检测的精度。特征提取的方法较多,包括几何特征提取法(geometry features extraction,GFE)、主成分分析法(principal component analysis,PCA)及神经网络特征提取法(neural network features extraction,NNFE)等。本文以人脸和车牌为例,阐述隐私信息的特征提取与定位过程。
1. 人脸检测
人脸检测即从不同的全景图像中检测出人脸的存在并确定其位置。人脸检测受光照、噪声及遮挡影响较大。用于人脸检测的特征提取在提取之前需对人脸图像进行归一化处理,通常包括灰度预处理、角度预处理和尺度预处理3个过程。
(1) 灰度预处理
灰度预处理主要去除不同光照对人脸图像的影响,比较常用的方法为直方图法。直方图表示数字图像中每一个灰度级与其出现的频率之间的统计关系。直方图变换函数包括高斯、瑞利、对数、指数等方式。对数形式的变换函数如下
(1)
式中,f(x,y)为输入图像;g(x,y)为输出图像;a、b、c为调整曲线的位置、形状参数。
(2) 角度预处理
在人脸识别过程中,通常假设输入的人脸图像的位置是正立的[5]。由于全景采集中人脸的姿态各异,因此需要对图像进行角度纠正。人脸姿态的纠正主要分为平面旋转与深度旋转。角度预处理后的姿态正立度估计方法有两种:模版匹配法和灰度统计法。
(3) 尺度预处理
由于全景采集过程中成像距离的任意性,人脸图像的尺寸差异较大,因此必须对图像进行尺度归一化处理。主要依赖于特征提取的方法,通常是先对人眼的两个瞳孔进行定位,然后将两个瞳孔之间的距离作为比例系数进行图像的缩放,进而得到人脸归一化图像。
在归一化处理的过程中,首先要对眼睛进行准确定位。眼睛定位可采用混合投影[6]或模板匹配[7]的方法。由于两眼中心间距受光照或表情变化的影响最小,因此两眼中心的连线可作为图像旋转和尺度处理的依据。由于同一张全景影像可能存在多个人脸的情况,归一化处理后即生成多个搜索区域,然后通过监督学习的方法对每个搜索区域进行自动识别分类。
(4) 监督分类与信息隐藏
监督分类是机器学习中的一个方法,可以由训练样本中学到或建立一个模型,并以此模型推测新的实例。目前常用的监督学习方法主要有支持向量机(support vector machine,SVM)、人工神经网络(artificial neural network,ANN)、决策树(decision tree)等。其中,支持向量机分类是一种基于统计学习理论的监督式机器学习方法,即已知训练点的类别,求训练点和类别之间的对应关系,以便将训练集按照类别分开,或是预测新的训练点所对应的类别[8-9]。它具有泛化能力强、全局最优和计算速度快等突出优点。本文在试验中采用支持向量机对全景影像中的人脸进行检测,然后通过高斯模糊算法对人脸区域进行模糊化处理。
2. 车牌定位
车牌号码是全景地图中的重要隐私信息。车牌快速定位的技术方法很多,包括彩色分割、形态学分析、区域生长、小波变换等。其中,基于投影图像分布特征的车牌自动检测定位技术[10]具有良好的鲁棒性。该方法的主要过程如下:
(1) 灰度预处理
全景影像中包含大量颜色信息,对全景影像进行灰度化处理不仅可以减小存储,还可以加快特征提取的计算速度。
(2) 二值化
二值图像是指整幅图像画面内仅黑、白二值的图像。在二值化图像时把大于某个临界灰度值的像素灰度设为灰度极大值,把小于这个值的像素灰度设为灰度极小值,从而实现二值化。在车牌定位过程中,图像二值变换的关键是确定合适的阈值。二值变换后的图像须具有原始的特征分布。
(3) 边缘检测
边缘检测是形状特征提取和图像分割的基础,主要是通过检测每个像素和其邻域的状态,以判定该像素是否位于一个物体的边界上。边缘检测的步骤主要包括滤波、增强、检测和定位4个过程。常用的边缘检测算子主要包括Roberts算子、Sobel算子、Prewitt算子、Krisch算子和高斯-拉普拉斯算子等。
(4) 开运算
对上述运算得到的图像进行形态学图像分析,主要包括腐蚀和膨胀运算。腐蚀是一种消除边界点的过程,可有效消除孤立噪声点;膨胀是将与目标物体接触的背景点合并到物体的过程,可填补目标物体中的空洞。开运算即先腐蚀后膨胀的过程,具有消除噪声、平滑较大边界的作用。
(5) 车牌定位与信息隐藏
车牌定位包括上下边界定位和左右边界定位。经开运算处理后的图像,车牌区域具有相对集中且规则的纹理特征,并具有连续性。因此,可根据车牌区域黑白跳变次数先确定车牌的上下边界,然后根据车牌字符在竖直方向的投影值来确定车牌的左右边界,最后通过高斯模糊算法对车牌区域进行模糊化处理。
三、试验
本文对武汉市江汉区部分道路的全景影像进行了试验,包括人脸检测和车牌定位。整个试验在Matlab 2011a环境下实现,支持向量机函数库采用LibSVM,同时采用线性回归(linear regression)和径向基函数(radial basis function,RBF)作为核函数进行分类结果比较。试验过程如下:
1. 人脸检测
首先对全景影像进行灰度、角度和尺度预处理。图1为人体部分采用对数变换方式后的效果及图像直方图对比图。由于车载全景影像采集过程中通常采用定焦镜头,并且行人与相机之间的距离大于某特定值(如车宽),因此可识别人脸的尺寸保持在一定范围内。经多次试验,采用25像素×25像素作为人脸尺寸的大小。试验采用LibSVM进行监督分类,在监督分类过程中采用PRTools软件自带的人脸样本库进行训练。采用交叉验证对惩罚系数进行寻优,得到最佳C=0.001,精度为94.5%。利用线性回归、径向基函数的比较结果及高斯模糊效果如图2所示。
2. 车牌号定位
在车牌号定位过程中,灰度处理采用的公式为
Gray =R×0.299+G×0.587+B×0.114
(2)
试验采用Otsu阈值分割算法对图像进行二值化处理,并采用Robert算子进行边缘检测,然后对得到的图像进行开运算,最后使用投影法实现车牌区域的定位。试验结果如图3所示。
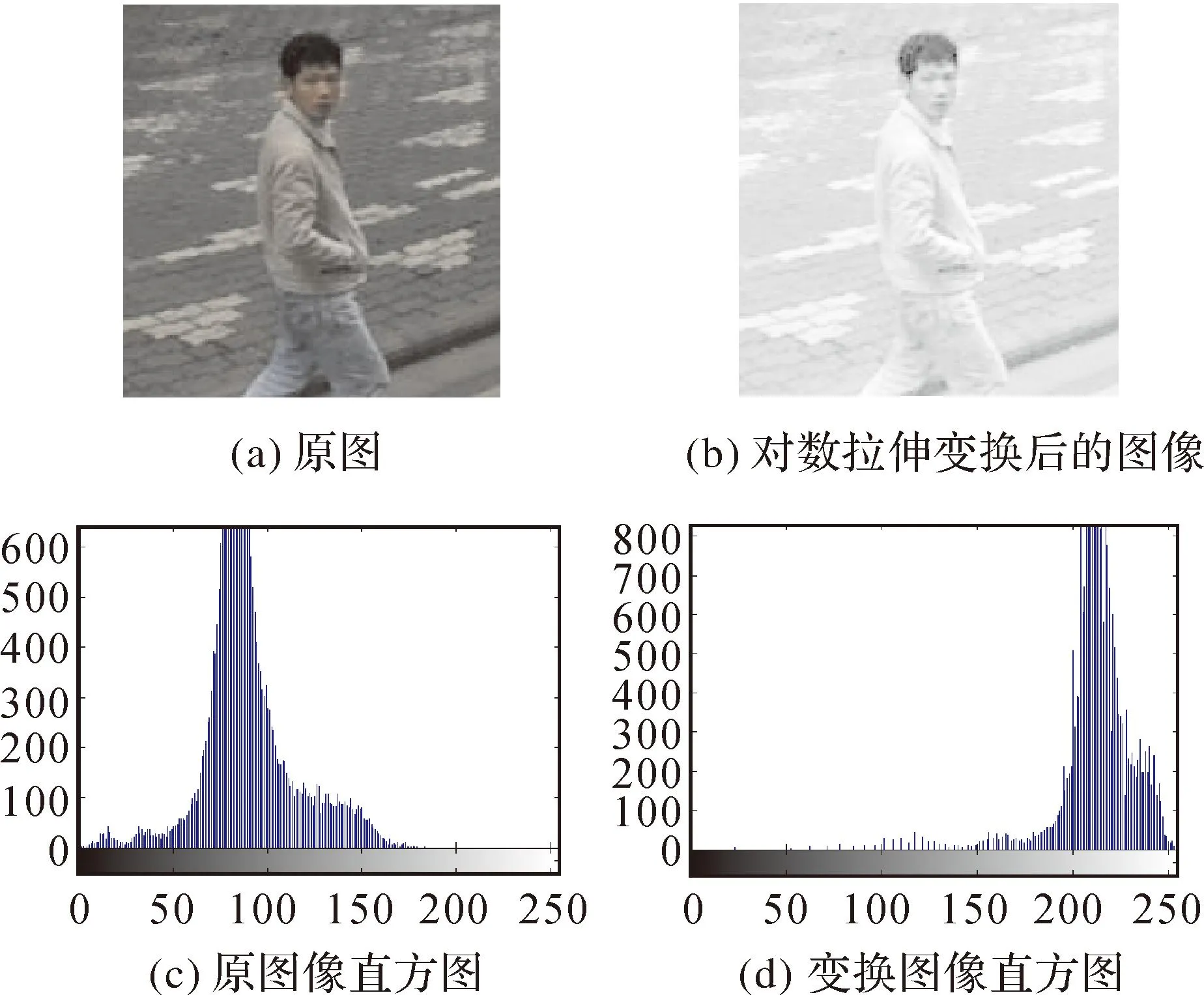
图1 对数变换的效果比较及图像直方图对比

图2 线性回归和SVM分类结果比较及信息隐藏

图3 车牌号定位
四、结束语
本文采用支持向量机和投影法实现了全景地图影像中人脸和车牌区域的检测,并采用高斯模糊实现了此类敏感信息的隐藏处理,大大提高了数据的处理效率。试验过程中还存在一些学习不充分、识别精度不足等问题。在以后的研究中,将对目标特征和模型参数进行优化,进一步提高全景地图隐私数据处理的自动化水平。
参考文献:
[1]李海亭,彭清山,王闪.数字城市中的全景地图系统建设方法研究[J]. 测绘通报,2011(4):71-73.
[2]符浩军,朱长青,赵毅,等. 面向网络环境的地理空间数据数字水印模型[J].测绘学报,2013,42(6):891-897.
[3]贾培宏,马劲松,史照良,等. GIS空间数据水印信息隐藏与加密技术方法研究[J].武汉大学学报:信息科学版,2004,29(8):747-751.
[4]朱长青,杨成松,任娜. 论数字水印技术在地理空间数据安全中的应用[J].测绘通报,2010(10):1-3.
[5]HUANG J, SHAO X, WECHSLER H. Face Pose Discrimination Using Support Vector Machines(SVM)[C]∥Proceeding of International Conference Recognition. Brisbane:[s.n.], 1998:154-156.
[6]耿新,周志华,陈世福.基于混合投影函数的眼睛定位[J].软件学报,2003,14(8):1394-1400.
[7]梁路宏,艾海舟,肖习攀.基于模板匹配与支持矢量机的人脸检测[J].计算机学报,2002,25(1):22-29.
[8]邓乃杨,田英杰.数据挖掘中的新方法——支持向量机[M].北京:科学出版社,2004.
[9]杨志民,刘广利.不确定性支持向量机[M].北京:科学出版社,2007.
[10]杨卫平,李吉成,沈振康.车牌目标的自动定位技术[J].中国图象图形学报,2002,7(8):835-839.
[11]张智勇.全景移动测量系统及其应用前景展望[J].测绘通报,2014(3):79-81.
通信作者:李艳红。E-mail: yanhongli1979@163.com
作者简介:李海亭(1980—),男,博士,高级工程师,主要从事车载激光扫描数据处理研究。E-mail: 120059908@qq.com
基金项目:国家自然科学基金青年基金(41101449);精密工程与工业测量国家测绘地理信息局重点实验室开放研究基金(PF2011-26)
收稿日期:2014-11-12
中图分类号:P283
文献标识码:B
文章编号:0494-0911(2015)12-0074-03
引文格式: 李海亭,李艳红,彭清山,等. 全景地图隐私信息处理的关键技术研究[J].测绘通报,2015(12):74-76.DOI:10.13474/j.cnki.11-2246.2015.383