海上搜救模拟器中模拟实时AIS信息的航位推算
2016-01-22周晨璨南通大学交通学院江苏南通226019
周晨璨(南通大学交通学院,江苏南通 226019)
海上搜救模拟器中模拟实时AIS信息的航位推算
周晨璨
(南通大学交通学院,江苏南通226019)
摘要:以海上搜救模拟器为平台,获取船舶航行过程中真实的船舶自动识别系统(Automatic Identification System,AIS)信息,对同一目标船舶相邻两次动态AIS信息之间的航位进行推算,使目标船舶平滑、动态地显示在模拟器中的电子海图与显示系统(ECDIS)、模拟雷达和三维视景上。
关键词:AIS;航位推算;中分纬度算法
船舶自动识别系统由岸基(基站)设施和船载设备组成,是船舶发射和接收动、静态信息的一种信息机制,是一种新型的集网络技术、现代通讯技术、计算机技术、电子信息显示技术为一体的数字助航系统和设备[1-2]。将真实的AIS信息引入到海上搜救模拟器中,海上搜救模拟器可以真实地模拟各个港口、航道在各种海况、天气下的三维场景。特别是将实际发生的海事或紧迫局面船舶周围的AIS信息重现在海上搜救模拟器中作为训练环境,能有效促进船员训练的积极性,提高船员的训练水平。但是AIS消息最快是2 s更新一次,根据AIS信息表示的船舶无法在三维场景中平滑显示,需要进行航位推算。国内外有诸多学者开发了将AIS信息与电子海图(或雷达、三维场景)相结合的模拟器系统[3-9]。
本文针对船舶航行过程中的真实AIS信息,解码[10-11]后对同一目标船舶相邻两次动态AIS信息之间的航位进行推算,使其能够平滑、动态地显示在模拟器中的电子海图与显示系统(ECDIS)、模拟雷达和三维视景上。本文将大量的AIS信息进行解码并存储到数据库中,在此基础上直接进行推算。
1 航位推算
航位推算(Dead Reckoning,DR)算法[12]是指从一个已知的坐标位置开始,根据运载体在该点的航向、航速和航行时间,推算下一时刻的坐标位置的导航过程。
1.1航位推算求纬度差
设已知船舶航行起始点的地理坐标为(φ1,λ1),需要推算的下一时刻的地理坐标为(φ2,λ2),则它们的关系式[13-15]为:

式中:φ1、λ1分别为起始点的纬度和经度;φ2、λ2分别为需要推算的下一时刻的纬度和经度; Dφ为起始点和到达点之间的纬度差,('); Dλ为起始点和到达点之间的经度差,(')。
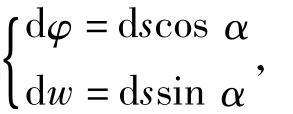
从式(1)可以看出,航位推算的核心问题是根据已知的航速和航向来计算经度差和纬度差。如图1所示,假设船舶从A点(φ1,λ1)沿恒向线航行到B点(φ2,λ2),航向为锐角α,航程为s。将s分成n等分[16],可得n个球面三角形,如果n足够大,这n个很小的球面三角形可以认为是全等平面直角三角形,其各自的斜边ds和锐角α都相等。
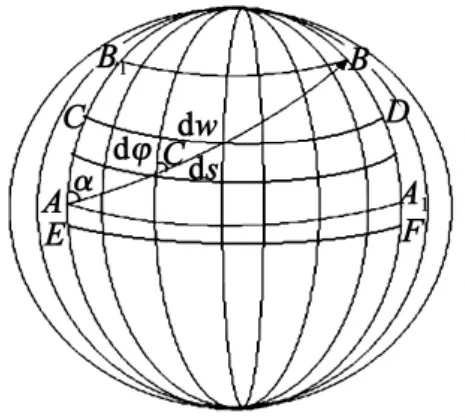
图1 船舶航行示意图
用dφ表示恒向线航程ds南北分量上的纬度差,dw表示ds东西分量上的经度差,由于纬度差和经度差可以用弧长表示[17],可得:
对其积分可得:

因此

式中ldep为东西方向的距离,n mile。
式(2)中的ldep是船舶起始点与终点之间的东西距,不是要求的经度差。常用的求经度差的方法有中分纬度算法、墨卡托算法及约定纬度算法3种。3种算法各有特点,本文采用中分纬度算法求经度差。
1.2中分纬度算法求经度差
从图1中可以看到,当起始点A和到达点B在同一个半球的时候,它们之间的东西距比纬度圈弧长AA1短,比BB1长。因此,在点A和点B所在子午线之间,一定存在一个纬度圈CD,它在A、B子午线之间的等纬圈弧长恰好等于AB的东西距。则纬度圈CD所在的纬度也就是中分纬度(middle latitude,φn)。假设EF位于赤道上,将地球视为半径为R的圆球体,可得CD的弧长WCD为:
WCD= EFcos φn。
而当把地球作为圆球体时,赤道上1'经度的弧长等于1 n mile,所以有:
Dλ= ldepsec φn= ssinαsec φn。
在低纬海区和中纬海区且航程不长时,中分纬度φn与起止点AB的平均纬度(middle latitude,φm)相差不大,可以用φm=(φ1+φ2)/2代替φn来求经度差,即

因此,求中分纬度的实质就是求平均纬度。
通过研究和模拟计算发现,当把地球当成椭圆体时,在低纬海区和中纬海区且航程不长时,用式(3)求经度差,产生的误差非常小,因此可以使用。
1.3基于实时AIS信息的航位推算
AIS消息最快是2 s更新一次,但是本研究采用的模拟器中的三维视景显示至少要保证30帧/s,为了防止目标船舶在视景中显示的抖动,需要对目标船舶相邻2次AIS信息进行航位推算。本文从数据库中选出一条船进行推算,为了便于看出推算效果,这里选出船速较快而且能在一段时间内持续航行的船舶,水上移动通信业务标识码(简称MMSI)为235010590,具体数据见表1。
从表1中可以看到,船舶并不是匀速运动,而且转向率r≠0,在推算时需要考虑到船舶的加速度和推算位置的真航向。
设船舶在t0时刻的速度为v0,真航向为H0,在t1时刻的速度为v1,t0~t1时刻的转向率为r,则加速度a和t1时刻的真航向H1分别为:

式中r =(rAIS/4.733)2(°)/min。

表1 MMSI为235010590时某段时间内的航行数据
但是,当本船收到某条目标船舶的第一条AIS消息时,无法推算其加速度,因此设置所有目标船舶的初始加速度为0,直到收到该条船舶的第二条AIS消息为止,然后根据式(4)修改其加速度。
表1是MMSI为235010590的船舶的一定时间段内的运动参数,设: t0时刻的速度v0=20.9 kn,经度λLan0=120.215 827°,纬度λLan0=38.676 387°; t1时刻的速度v1=21.0 kn,经度λLon=120.216 073°,纬度λLat=38.676 352°,真航向H1=103°。推算t2时刻的位置: 1)求船舶航行的加速度a; 2)根据加速度求出航程s; 3)由式(2)求得纬度差从而得到t2时刻的纬度; 4)求得t1~t2的平均纬度,根据式(3)求得经度差,进而得到t2时刻的经度。
在实际应用中,可根据运动对象的运动水平及实际数据传输率,分析DR算法中参数的取值范围,来确定更新时间间隔[18]。本研究中,为了防止视景的抖动,航位推算的时间步长应等于三维视景每帧显示的时间[3],为了计算方便,取Δt =0.033 33 s。设ti~ti +1时刻间隔ns,则ti~ti +1需推算n/ΔT次。从数据库中读取船舶信息并判断是否进行航位推算的流程图如图2所示。
图3记录了MMSI为235010590的船舶在步长Δt =0. 03 333 s,从ti时刻开始推算的第n/ΔT次航位与ti +1时刻的真实航位在坐标系中的位置关系。
N次航位推算得到的航位时刻正好是下一条AIS消息到达的时刻,通过图3可以看出,该时刻推算的航位与实际AIS消息包含的实际航位的误差非常小,两者几乎在同一条线上,最大误差不超过0.5 m。
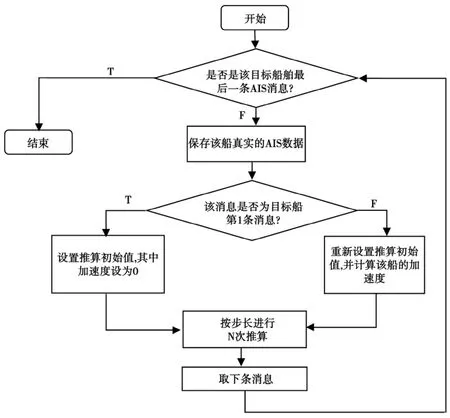
图2 航位推算流程图
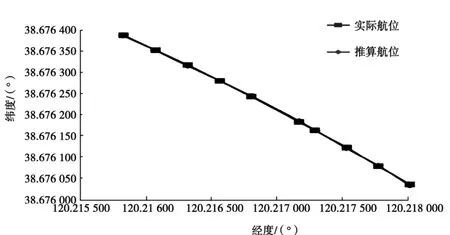
图3 推算航位与实际航位的比较
2 结语
真实有效的AIS信息是将其运用到海上搜救模拟器中的前提,而将这些AIS信息融合到海上搜救模拟器中,则需要进行航位推算。本文应用中分纬度算法对实时的AIS信息进行航位推算,与真实的航行数据进行比较,结果验证了该算法的有效性。
参考文献:
[1]金一丞,尹勇,张显库.海上搜救模拟器建设项目工程可行性及初步设计研究报告[R].大连:大连海事大学,2006.
[2]纪贤标,邵哲平,潘家财,等.AIS信息分布式采集系统的开发及关键技术[J].上海海事大学学报,2007,28(1):28-31.
[3]刘红屏.AIS综合模拟器的研究与开发[J].青岛远洋船员学院学报,2004,25(4):7-11.
[4]于治东.航海模拟器中UAIS仿真模块的设计与实现[D].大连:大连海事大学,2008.
[5]张大勇,兰培真,罗喜伶.基于AIS的船舶三维显示与避碰系统研究[J].集美大学学报(自然科学版),2007,12(1):1-6.
[6]GOLD C,GORALSKI R.3D graphics applied to maritime safety[C]/ / Information Fusion and Geographic Information Systems.Berlin: Springer Berlin Heidelberg,2007:286-300.
[7]WAKABAYASHI N,MAKINO H,MORI K,et al.Development of radar simulator software using AIS data for ship data[C]/ / OCEANS 2010 IEEE.Sydney: IEEE,2010:1-5.
[8]WAKABAYASHI N,JURI Harada,YOSHIHIRO Ishi,et al.Discussion of functions,usability and providing information for ship navigation system [C]/ /The Proceedings of Japan Institute of Navigation.Japan: Japan Institute of Navigation,2007:49-58.
[9]WAKABAYASHI N,HARADA J,KOBAYASHI Eiichi,et al.Proposal of target data display notation on navigation systems[C]/ /The Proceedings of Japan Institute of Navigation.Japan: Japan Institute of Navigation,2008:75-82.
[10]周毅,AIS信息解码和显示[J].航海技术,2006(2):34-36.
[11]吴建华,陶德馨.自动船舶识别系统的信息解码技术研究[J].武汉理工大学学报,2007,31(4):595-598.
[12]朱庄生,万德钧,王庆.航位推算累积误差实时修正算法研究[J].中国惯性技术学报,2003,11(3):7-11.
[13]孙现有,李耀宇,余文广.基于DR算法的舰船航迹细化研究[J].舰船电子工程,2010(6):50-53.
[14]陶化成.DR算法门限值的确定[J].系统仿真学报,2002,14(3):284-285,288.
[15]张冰,杨明,王子才.分布交互仿真中的DR技术实现方案[J].系统仿真学报,2000,12(1):75-79.
[16]郭禹,杨守仁.航海学[M].大连:大连海事大学出版社,2005.
[17]陈世才,孙广,李锦芳.墨卡托航法与中分纬度航法的关系[J].大连海事大学学报,1999,25(1):28-29,83.
[18]周绥平,陈宗基.DR算法的更新时间间隔研究[J].系统仿真学报,1995,7(2):13-18.
(责任编辑:郎伟锋)
Dead Reckoning of Real-Time Simulation of AIS Information in Maritime Search and Rescue Simulator
ZHOU Chencan
(School of Transportation,Nantong University,Nantong 226019,China)
Abstract:Base on the maritime search and rescue simulator,real Automatic Identification System(AIS)data are obtained in the ship voyage.The data are used to make the dead reckoning for two adjacent dynamic AIS data at the same target ship,so that the target ship can smoothly and dynamically display on the Electronic Chart and Display System(ECDIS),radars and three-dimensional scene in the simulator.
Key words:AIS; dead-reckoning; middle latitude algorithm
作者简介:周晨璨(1988—),女,重庆人,助教,工学硕士,主要研究方向为航海动态模拟仿真.
收稿日期:2015-03-18
DOI:10.3969/j.issn.1672-0032.2015.03.014
文章编号:1672-0032(2015)03-0068-05
文献标志码:A
中图分类号:U675.7
