多液压缸同步驱动系统DCAT-NDI控制研究
2016-01-22王宏亮刘湘琪
倪 敬,王宏亮,蒙 臻,刘湘琪
(杭州电子科技大学机械工程学院,浙江 杭州 310018)
摘要:针对多缸同步电液伺服系统(MIMO系统)驱动性能易受执行器冗余和外部扰动等非线性因素影响的问题,建立了MIMO系统最简形式(四缸同步驱动系统)的动力学模型,并引入基于二次规划的动态控制理论DCAT和非线性动态逆控制策略NDI,提出了一种DCAT-NDI的多缸同步控制策略。该控制策略首先计算负载姿态期望的最优映射,实现了MIMO系统各液压缸位移期望输出的解耦;其次,根据跟踪位移误差与速度期望以及跟踪速度误差与加速度期望的相似性原理,引入位移频率带宽和速度频率带宽概念,构造各自通道的逆系统,从而求解各自通道的最优控制。仿真和实际结果表明,该文提出的控制策略比常规PID同步控制策略具有更好的同步性能和稳定性能。
关键词: 动态控制分配;非线性逆;多缸同步驱动;电液伺服控制
DOI: 10.13954/j.cnki.hdu.2015.01.003
多液压缸同步驱动系统DCAT-NDI控制研究
倪敬,王宏亮,蒙臻,刘湘琪
(杭州电子科技大学机械工程学院,浙江 杭州 310018)
摘要:针对多缸同步电液伺服系统(MIMO系统)驱动性能易受执行器冗余和外部扰动等非线性因素影响的问题,建立了MIMO系统最简形式(四缸同步驱动系统)的动力学模型,并引入基于二次规划的动态控制理论DCAT和非线性动态逆控制策略NDI,提出了一种DCAT-NDI的多缸同步控制策略。该控制策略首先计算负载姿态期望的最优映射,实现了MIMO系统各液压缸位移期望输出的解耦;其次,根据跟踪位移误差与速度期望以及跟踪速度误差与加速度期望的相似性原理,引入位移频率带宽和速度频率带宽概念,构造各自通道的逆系统,从而求解各自通道的最优控制。仿真和实际结果表明,该文提出的控制策略比常规PID同步控制策略具有更好的同步性能和稳定性能。
关键词:动态控制分配;非线性逆;多缸同步驱动;电液伺服控制
DOI:10.13954/j.cnki.hdu.2015.01.003
收稿日期:2014-05-28
作者简介:倪敬(1979-),男,浙江武义人,教授,电液伺服同步系统建模与控制应用.
中图分类号:TP273
文献标识码::A
文章编号::1001-9146(2015)01-0014-09
Abstract:Aiming at the problem that the driving performance on synchro-motion system with multi-cylinder is often disturbed by nonlinear factors such as redundancy or external disturbance of actuators, a simplest dynamics model of MIMO system(synchro-motion system with four-cylinder) is established. Then a synchronous control strategy of multi-cylinder which is named DCAT-NDI is provided. The dynamic control allocation theory(DACT) which is based on the constrained quadratic programming and the nonlinear dynamic inverse(NDI) control strategy is introduced in this control strategy. Firstly, the decoupling on MIMO system with desired displacement output of each cylinder is realized by optimal mapping the desired attitude of the road; Then concepts about displacement frequency bandwidth and velocity frequency bandwidth are introduced, inverse system of each channel is constructed, and the optimal control of each channel is solved according to the similarity principle between the displacement track error(the velocity track error) and the desired velocity(the desired acceleration). The simulation and factual applications show that the proposed control strategy has a better stabilizing and synchronization performance than that of conventional control strategy.
0引言
多缸同步电液伺服系统广泛应用于冶金、军事、机械制造等工业中的重型负载提升和推拉场合[1],多缸同步控制的研究对于满足上述许多领域的实际需要具有重要的理论意义和工程使用价值[2]。
对于多液压缸同步控制问题,国内外许多学者进行了大量的研究。如Cheng-Yi Chen等针对双缸举升电液伺服同步驱动系统,设计了前馈控制与模糊跟随控制相耦合的控制方式[2];Xiong等针对对象模型采用了自适应控制的方法,同时在控制策略中加入了交叉耦合的概念,改善了对象模型的同步精度,也减小了液压系统非线性因素的影响[3];Zhang Wei以远程遥控的双缸同步驱动系统为研究对象,采用平衡阀和电液伺服控制以达到同步控制[4];刘少军等人以锻模液压机为研究对象,提出鲁棒控制技术来提高系统同步控制精度[5];沙郑辉等人研制了基于模型参考模糊自适应控制(MRFAC)的双缸同步驱动系统[6];顾凯等人以伺服同步夹持试验平台为研究对象,提出位置闭环和力跟随控制策略[7]。根据以上文献所述,目前的控制策略,一方面,大都基于经典的液压伺服系统建模理论,没有考虑多个阀控缸系统的管路流量耦合特性;另一方面,以上研究大都集中在鲁棒和智能控制领域,其控制策略的实现可靠性还有待进一步完善。因此,进一步研究多缸电液伺服同步驱动系统动特性,优化系统同步控制策略是十分必要的。
于是,本文以多缸同步驱动系统的最简形式(四缸同步驱动系统)为测试平台,建立实际系统动力学模型,并引入基于二次规划的动态控制理论(Dynamic Control Allocation Theory, DCAT)和非线性动态逆控制策略(Nonlinear Dynamic Inverse, NDI),提出了一种DCAT-NDI的多缸同步控制策略,并对该控制策略进行了仿真及实验。
1系统模型
本文研究的多缸(四缸)同步驱动系统(Synchro-motion System with Four Cylinders)如图1所示。主要由底部框架、4件导向柱、活动框架(负载)、顶部框架、4个液压缸、4个伺服阀和相应的液压系统附件组成;4个液压缸缸体采用中间耳轴式安装在底部框架上,活塞杆通过球铰耳环安装在举升负载框架的支座上。每一个液压缸由各自的一组电液伺服阀控制。
如果只考虑驱动部分,图1可以简化为如图2所示的结构,其中pi1是液压缸无杆腔进油口压力;pi2是液压缸有杆腔出油口压力;i=1,2,3,4;pp是油源供油压力。

图1 四缸同步举升实验台结构原理图
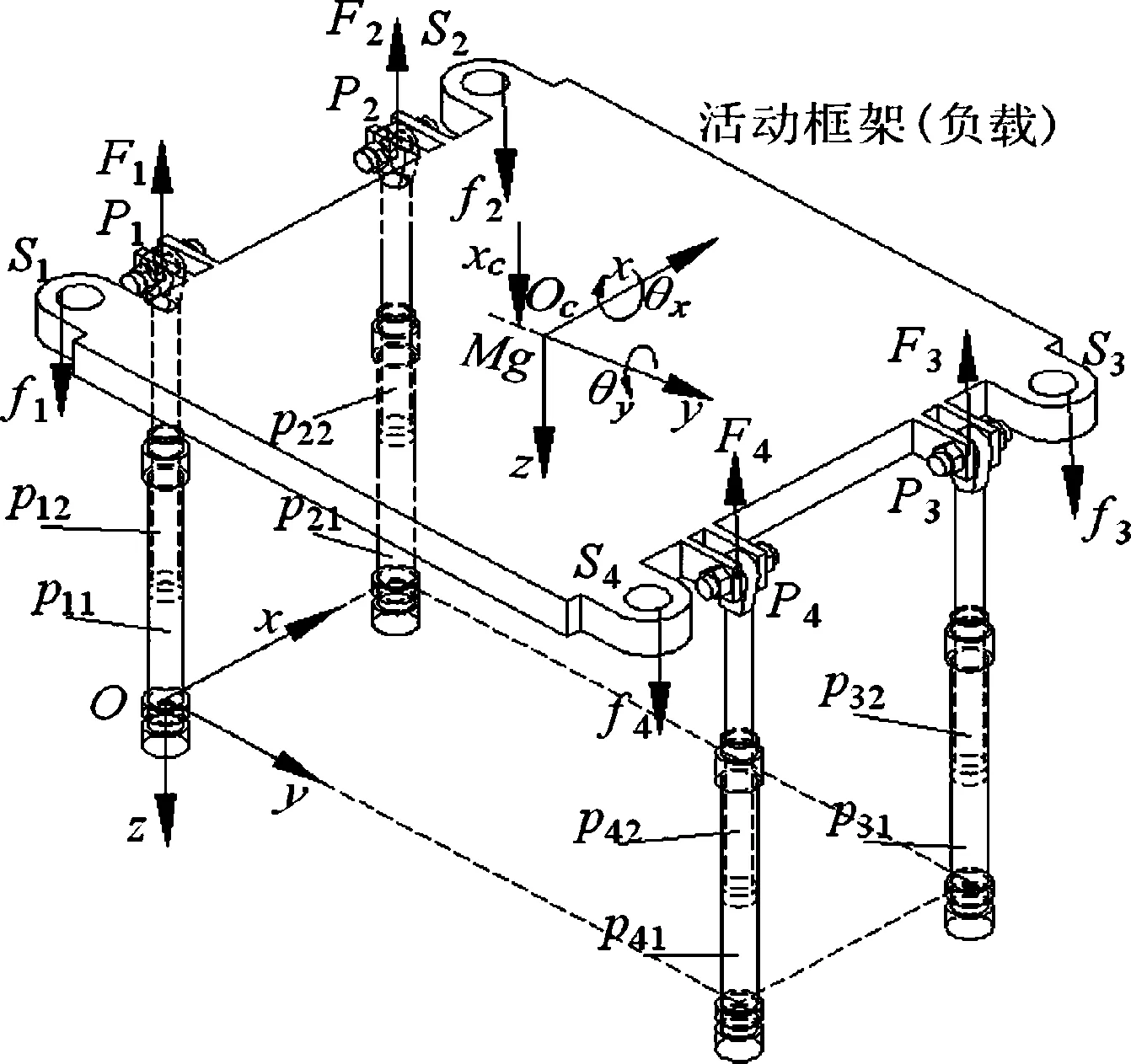
图2 四缸同步驱动系统建模原理图
图2所示的驱动系统,以第一个液压缸中间耳轴的中点O为原点,以1号液压缸与2号液压缸的中间耳轴中心连线方向为X轴,以1号缸与4号缸的中间耳轴中心连线方向为Y轴,以竖直方向为Z轴建立绝对坐标系OXYZ;相对坐标系Ocxyz的原点固连与负载质心Oc,其x,y,z轴与绝对坐标系一致;相对坐标系Ocxyz其实是绝对坐标系OXYZ的空间平移。此外,图2中Fi是第i号缸的活塞杆输出力;xi是为第i个液压缸活塞杆的位移;fi是导向套与导向柱之间的摩擦力;Pi(Pix,Piy,Piz)是i号液压缸耳环与活动框架对应铰接点之间的中心坐标;Si(Six,Siy,Siz)为负载框架在第i个接触导向柱上对应连接孔的中心坐标;M是负载的质量。
1.1 负载运动方程
考虑到导向柱的导向作用,负载沿着x和y轴的运动量很小,其负载姿态可以由3个状态量来描述,分别是质心Oc在Z向上的位移zc,负载绕x轴转角θx,以及负载绕y轴转角θy,转角正向如图2所示。于是,以负载为研究对象,运用牛顿第二定律和刚体定轴转动定律可以得到以下的运动方程:

(1)
式中,Jx和Jy分别为负载绕x轴和y轴的转动惯量。
1.2 负载姿态与各液压缸活塞位置的关系
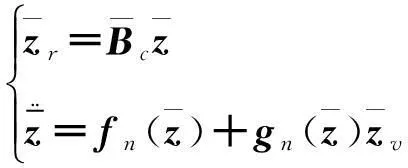
根据图2,定义矢量z=[z1z2z3z4]T,zo=[zcθxθy]T,其中zi(i=1,2,3,4)表示各液压缸活塞在Z方向的位移,则z与zo的关系如下:

(2)
于是,负载姿态与各液压缸活塞位置的关系可以表示为:
zo=Bcz
(3)

1.3 各液压缸活塞的运动方程
对i号液压缸活塞进行受力分析,根据牛顿第二定律,可以表示为以下方程:

(4)
式中,mi为第i个液压缸的活塞质量;g为重力加速度;Ai1、Ai2为i号液压缸无杆腔和有杆腔面积;bi为i号液压缸的阻尼系数。
1.4 各液压缸的负载压力动特性方程
非对称伺服阀控非对称缸的压力动特性[8-10]可以描述为:

(5)

式(5)中,βe为油液容积模数;ωi为阀口第i个伺服阀阀口1、2的面积梯度(mm2/mm);ziv为第i个比例阀阀芯位移(mm);piL为第i个液压缸负载压力;Vie为第i个液压缸等效容积;ζ=ω2/ω1,面积梯度比;η=Ai2/Ai1,为液压缸两腔面积之比;Ls为液压缸行程;Cit为第i个液压缸总泄漏系数;Cip为液压缸内泄漏系数;Cep为液压缸外泄漏系数;φi为第i个阀控缸的负载流量增益;ρ为油液密度(g/cm3);pp为系统油源压力(MPa);Cd为阀口流量系数;αz为阀的换向因子,当ziv>0时取1,ziv<0时取η。sign(ziv)表示第i个液压缸活塞的运动方向。
(6)
1.5 系统总体动力学模型
根据以上分析,定义摩擦力矢量矩阵f=[f1f2f3f4]T;液压缸输出力矩阵F=[F1F2F3F4]T;无杆腔截面面积矩阵A1=diag(A11,A21,A31,A41);有杆腔截面面积矩阵A2=diag(A12,A22,A32,A42);无杆腔压力矩阵p1=[p11p21p31p41]T;有杆腔压力矩阵p2=[p12p22p32p42]T;重力加速度常量矩阵g=[gggg]T。则联立式(1)和式(4),可以得到系统总体动力学模型为:
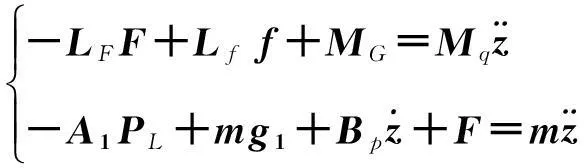
(7)

然后,将式(7)消去F,可以得到:

(8)
式中,Mz=Mq+LFm;Bz=LFBp;Dz=LFA1;Ez=Lf f+MG+LFmg1。

(9)
上式即为多缸同步驱动系统在Matlab中进行仿真研究提供了模型支持。
2DCAT-NDI同步控制策略
2.1 控制策略分析
如式(9)所示四缸同步驱动系统是多缸同步驱动系统(MIMO系统)的特例。考虑一般性,n个液压缸构成的多缸同步驱动系统(MIMO),其模型具有以下的一般形式:
(10a)(10b)


如图3所示,本文提出的同步控制策略具体分解为以下两个步骤:
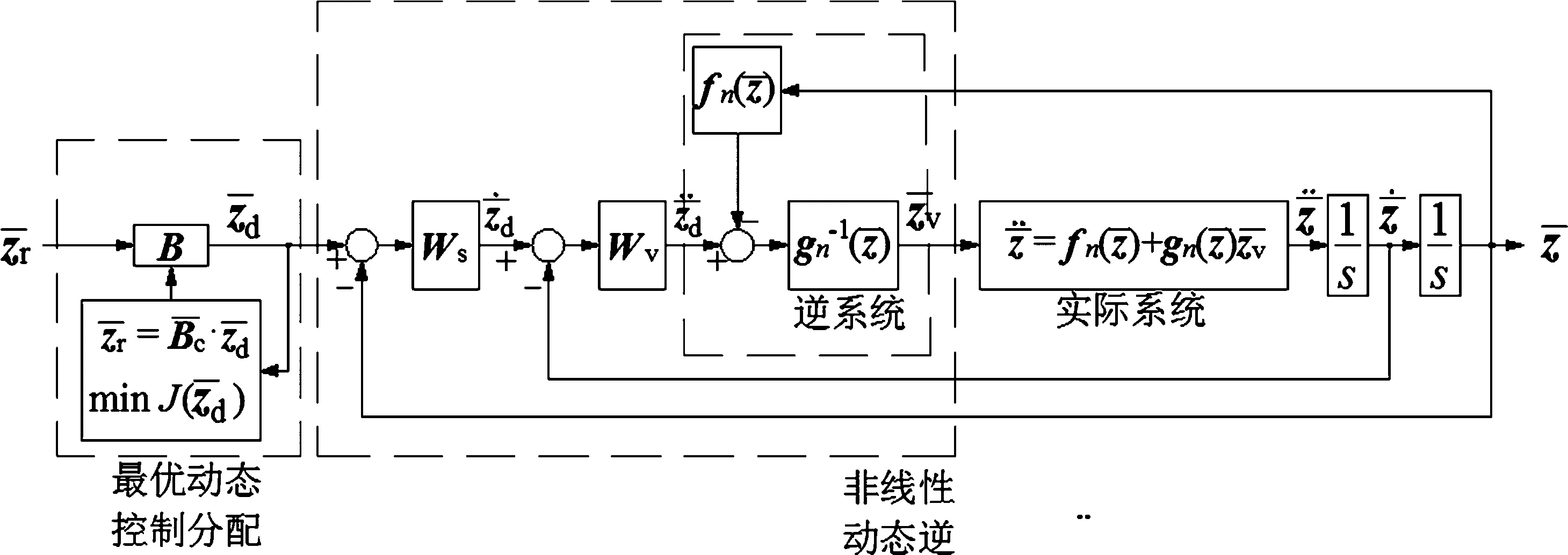
图3 DCAT-NDI同步控制策略结构图


2.2 DCAT-NDI控制器设计
1)系统控制性能指标。基于等同式控制策略,针对式(10a,10b)系统提出相关的控制性能指标如下:
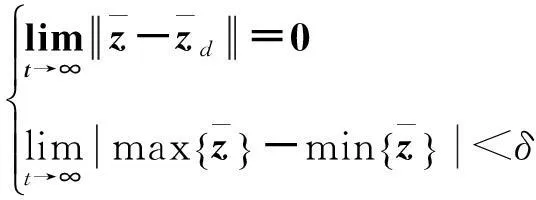
(11a)(11b)
2)最优动态控制分配器设计。根据控制策略分析,首先构造控制分配评价指标函数J为:
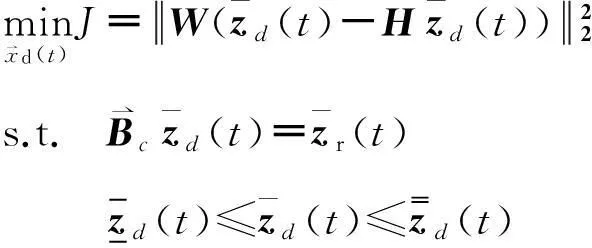
(12)

然后,当W为非奇异对称矩阵时,基于二次规划求解,即可得到J的最优解:

(13)


(14)
(15)
(16)

(17)


(18)



(19)
(20)
式中,Kv是伺服阀的阀芯位移增益。
2.3 基于DCAT-NDI的四缸同步控制器设计
将上述的结果应用于四缸同步驱动系统,如式(10a,10b)所示的系统退化为四输入四输出(4I4O)系统:


针对式(21a,21b)所示的系统,基于系统同步控制性能要求,采用上述的DCAT-NDI同步控制器设计步骤,得到最终四缸同步控制输入为:

(22)

3仿真和实际应用研究
本文以四缸同步电液伺服举升实验台为研究对象。实验台拥有4个液压缸,其活塞、活塞杆、直径分别为63 mm、45 mm,行程为800 mm;与4个液压缸分别对应的是型号为RH-M0500-S1-DN02-A01的位移传感器和西门子SM338模拟量输入模块,型号为4WREEM 6 E1-32-20/G24K34/B6V的伺服阀和西门子SM332模拟量输出模块;液压油源工作压力为6 MPa,工作流量为120 L/min。
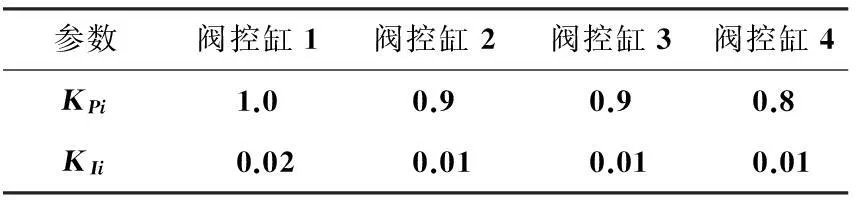
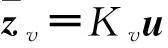
表1 四缸PID同步驱动系统控制参数取值表

表2 系统相关参数取值表
对比图4、5和图6、7可知,PID控制器和DCAT-NDI控制器的四缸跟踪误差、同步误差的仿真结果与工作台实际运行结果基本一致。由此说明,本文提出的建模理论是有效的。

图4 两种控制器的四缸跟踪误差仿真结果
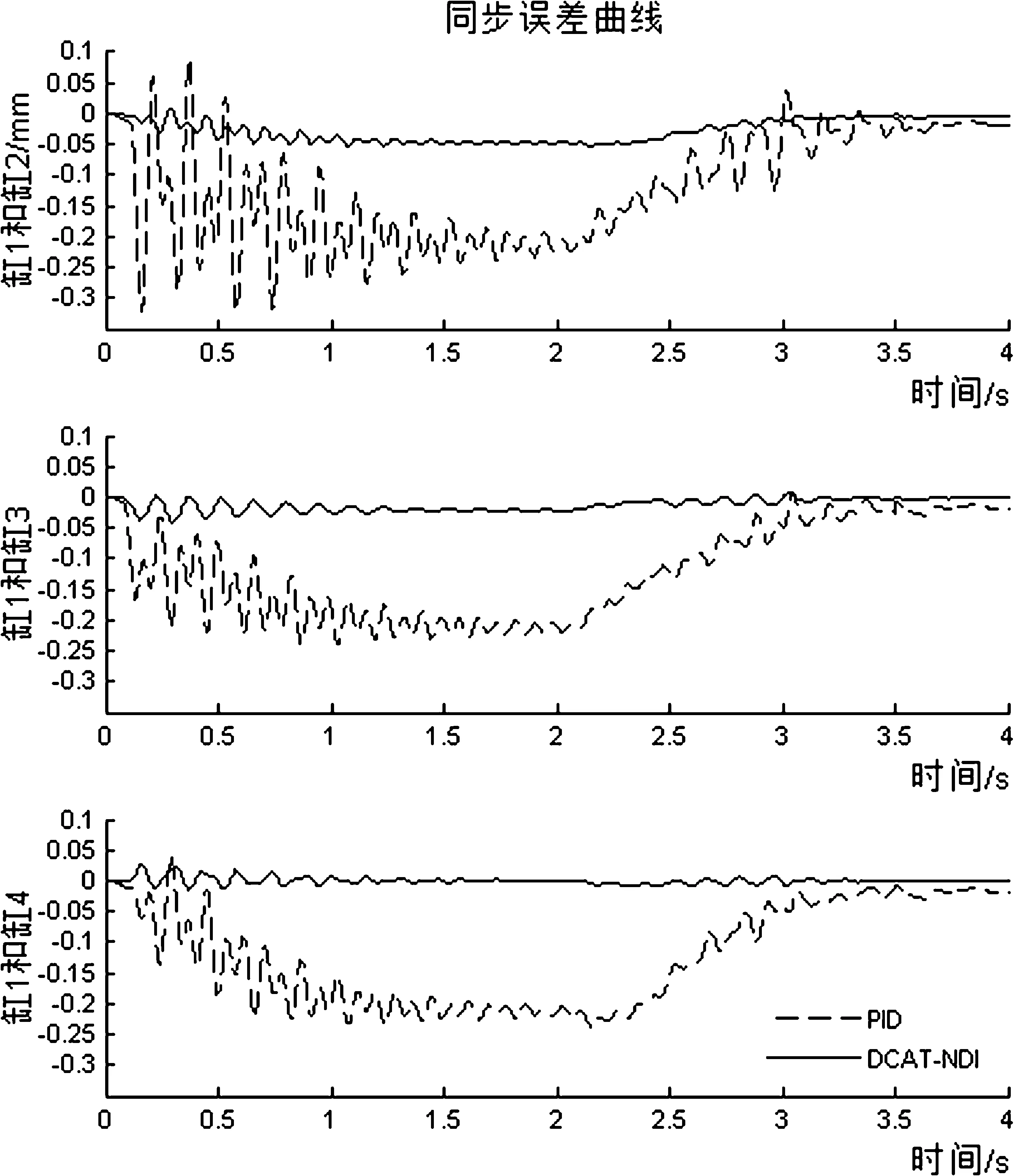
图5 两种控制器的四缸同步误差仿真结果
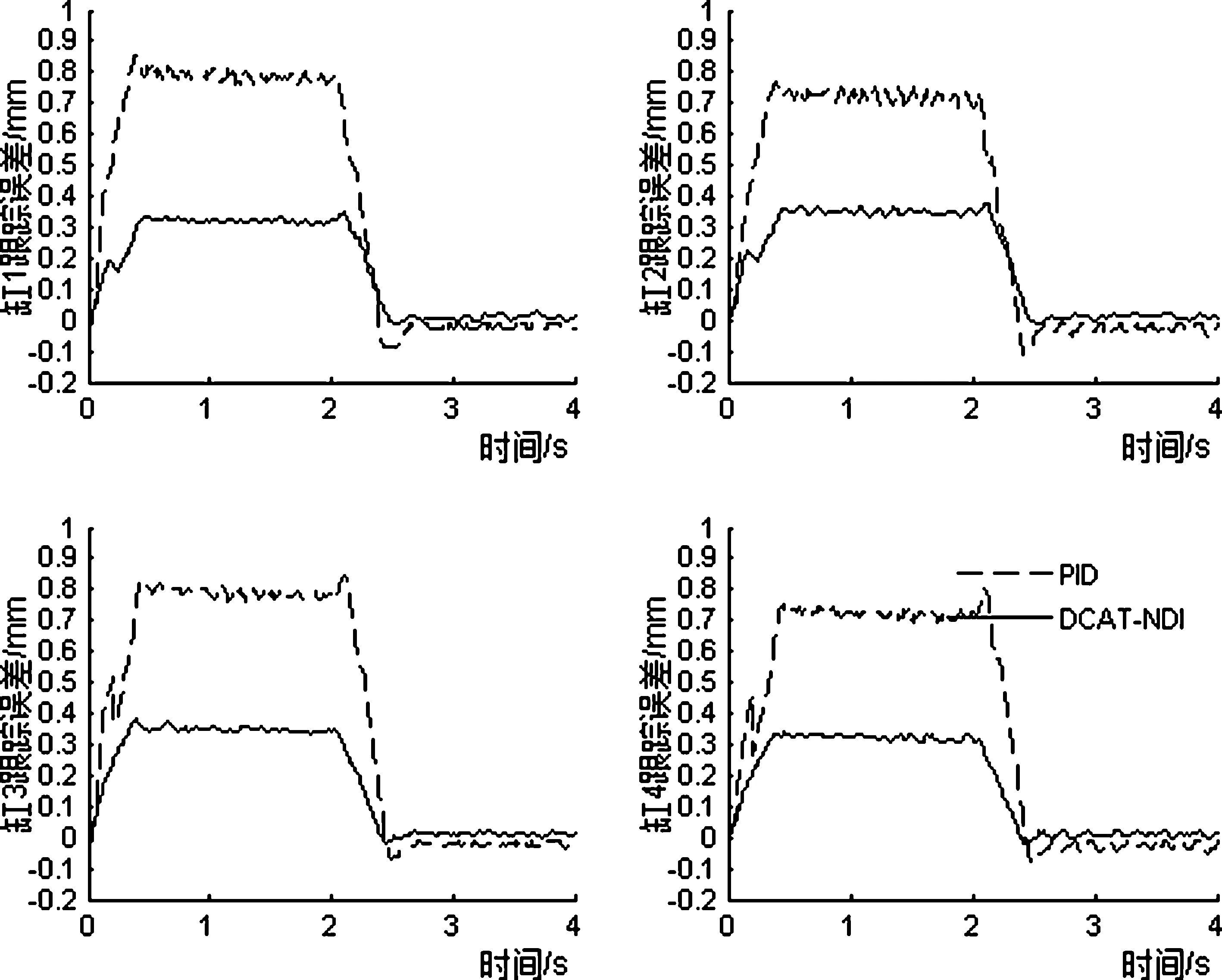
图6 两种控制器的四缸跟踪误差实际运行结果
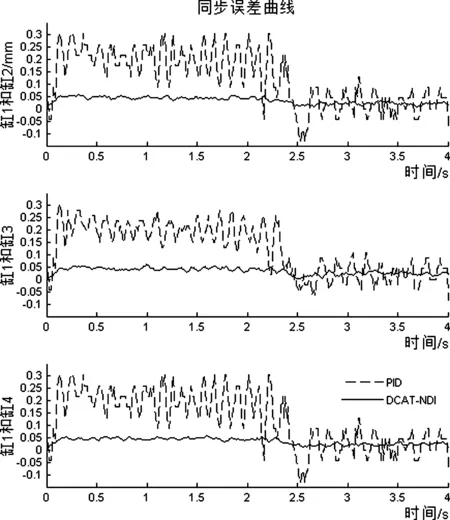
图7 两种控制器的四缸同步误差实际运行结果
对比图4和图6,其结果如表3所示,仿真控制情况下PID控制的四缸最大跟踪误差在0.7 mm左右,而DCAT-NDI控制的四缸跟踪误差在0.2 mm左右;实际控制情况下PID控制的四缸最大跟踪误差在0.8 mm左右,而DCAT-NDI控制的四缸跟踪误差在0.3 mm左右,且DCAT-NDI控制的四缸跟踪误差变化相对平缓许多。因此,仿真和实际运行结果说明,DCAT-NDI控制器相比PID控制器,具有更好的跟踪响应性能。

表3 两种控制器跟踪误差及同步误差结果比较 mm
综上分析,DCAT-NDI控制器相比PID控制器,具有更好的跟踪响应性能和同步驱动性能。
4结束语
本文结合DCAT和NDI理论,基于负载姿态最优动态控制分配方法,提出了多缸同步驱动DCAT-NDI控制策略。四缸系统实际控制结果表明,本控制策略相比PID同步控制策略,在现象上表现为负载的运动更加流畅;从误差曲线的对比分析中可得,本控制策略具有更好的系统同步性能和稳定性能。
参考文献
[1]施光林,史维祥.液压同步闭环控制及其应用[J].机床与液压,1997(4):3-7.
[2]Chen C Y, Liu L Q, Cheng C C, et al. Fuzzy controller design for synchronous motion in a dual-cylinder electro-hydraulic system[J]. Control Engineering Practice,2008,16(6):658-673.
[3]Xiong Y F, LeQuoc S, Cheng R M H. Adaptive control of a synchronizing servo-system[R]. SAE Technical Paper,1992.
[4]Zhang W, Sun B, Li B, et al. Two-cylinder Synchronization Control and Simulation of ROV Launch and Recovery System “A Shape” Frame[J]. Applied Mechanics and Materials,2013,271:1 705-1 708.
[5]刘宗伟,黄明辉,刘新良.巨型锻模液压机同步控制系统的鲁棒控制研究[J].锻压技术,2011,36(5):88-93.
[6]沙郑辉,赵升吨.基于MRFAC的液压双缸同步控制系统设计与仿真[J].机床与液压,2013,41(5):89-96.
[7]顾凯,李长春,周欣.电液伺服系统同步控制研究[J].液压与气动,2010,(6):1-3.
[8]倪敬,彭丽辉,陈国金.四缸驱动起模机非线性PID同步控制研究[J].中国机械工程,2011,(14):1 645-1 650.
[9]Merritt H E.液压控制系统[M].北京:科学出版社,1976:194-198.
[10]吴根茂,邱敏秀,王庆丰.实用电业比例控制技术[M].杭州:浙江大学出版社,2006:381-387.
[11]Härkegård O. Dynamic control allocation using constrained quadratic programming[J]. Journal of Guidance, Control, and Dynamics,2004,27(6):1 028-1 034.
[12]Gai W, Wang H. Closed-loop dynamic control allocation for aircraft with multiple actuators[J]. Chinese Journal of Aeronautics,2013,26(3):676-686.
[13]成大先.机械设计手册(第五版)[M].北京:化学工业出版社,2011:12.
DCAT-NDI Control on Synchro-motion System with Multi-cylinder
Ni Jing, Wang Hongliang, Meng Zhen, Liu Xiangqi
(HangzhouDianziUniversity,HangzhouZhejiang310018,China)
Key words: dynamic control allocation theory; nonlinear dynamic inversion control; synchro-drive with multi-cylinder; electro-hydraulic servo control
