一种改进的毫米波雷达多目标检测算法*
2016-01-21宋春林
杜 佳,宋春林
(同济大学 电子与信息工程学院,上海 201804)
一种改进的毫米波雷达多目标检测算法*
杜佳,宋春林
(同济大学 电子与信息工程学院,上海 201804)
Fundation Item:Natural Science Foundation of Shanghai(No.14ZR1442700)
摘要:智能驾驶主要依据前视雷达进行目标探测,基于毫米波雷达的多目标检测算法是目前的研究热点。但现有的基于FMCW的雷达多目标检测算法存在大量虚警、漏检的问题,且无法获得目标的方位信息,很难应用到复杂多变的道路环境中。提出了一种改进的毫米波雷达多目标检测算法。该算法在传统FMCW算法的基础上,提出相位差和功率差联合匹配模型进行频率匹配的思想,较好地解决了FMCW算法中频率匹配差错、无法得到目标方位信息等问题。对该算法进行了多目标模拟仿真和实测道路试验,仿真和实验结果表明,基本上能正确检测出多目标的距离、速度、方位角,且性能可靠稳定。
关键词:毫米波雷达;多目标检测;FMCW;虚警
0引言
智能驾驶是未来汽车工业的一个发展方向,它能帮助驾驶员获得更好的驾驶体验。智能驾驶首先需要使用传感器来对周围的目标进行实时检测,以供驾驶系统做出正确的驾驶决策。毫米波雷达以其抗干扰能力强、精度高、测量距离大等特点[1],成为智能驾驶前端传感器的最佳选择。但现有的雷达目标检测算法仍不足以应用于复杂多变的道路环境中,其中最大的问题是无法进行多目标检测。
目前常用的雷达目标检测算法有CW、FSK和FMCW。CW和FSK由于调制波形简单、算法复杂度低,不适于多目标检测[2]。FMCW方法发射频率按三角波变化的雷达波,通过检测频率上升段和下降段的峰值频率,可用于同时测量速度与距离。但使用FMCW进行多目标检测时,由于无法正确匹配频率上升段和下降段的各个峰值频率,会得到数倍于真实目标的虚假目标。针对这一问题,文献[3]提出一种采用两个检测门限及位置相关性的方法来检测多目标,但算法易受环境干扰。文献[4]提出了一种改变FMCW调制波斜率的方法来减少虚假目标,但算法复杂度较高、计算量大,对设备的要求较高,且实时性较差。文献[5]改进了常规FMCW算法的调制波形,提出一种阶梯式的调制波,提高了计算精度与计算速度,但算法复杂度大大提高,对设备的要求也极高。以上算法均可检测出目标的距离与速度,但却无法得到目标的方位角,这也是一个相当重要的参数。
针对FMCW无法准确匹配多目标频率、算法复杂度高和无法得到目标方位角的问题,本文提出一种改进的FMCW雷达多目标检测算法。该算法基于FMCW算法思想,增加一个接收天线,采用等周期、斜率不变的三角调制波,使用自动门限排除干扰,通过建立上升段和下降段峰值频谱的相位差和功率差的联合自适应匹配模型进行峰值频率匹配,在检测多目标的同时大大降低了算法的复杂度和计算量。同时,利用双接收天线接收信号的相位差,可计算得到目标的方位角。仿真结果表明,本文所述算法性能有所提高,能有效检测出多个目标的速度、距离、方位角。
1FMCW雷达目标检测原理
雷达系统结构如图1所示,雷达信号发射机通过一路天线发射高频雷达信号,用两路天线接收目标物体反射的信号,并分别与发射信号混频后得到中频信号,处理器经过采样、计算后即可得到目标物体的速度、距离、角度等信息。
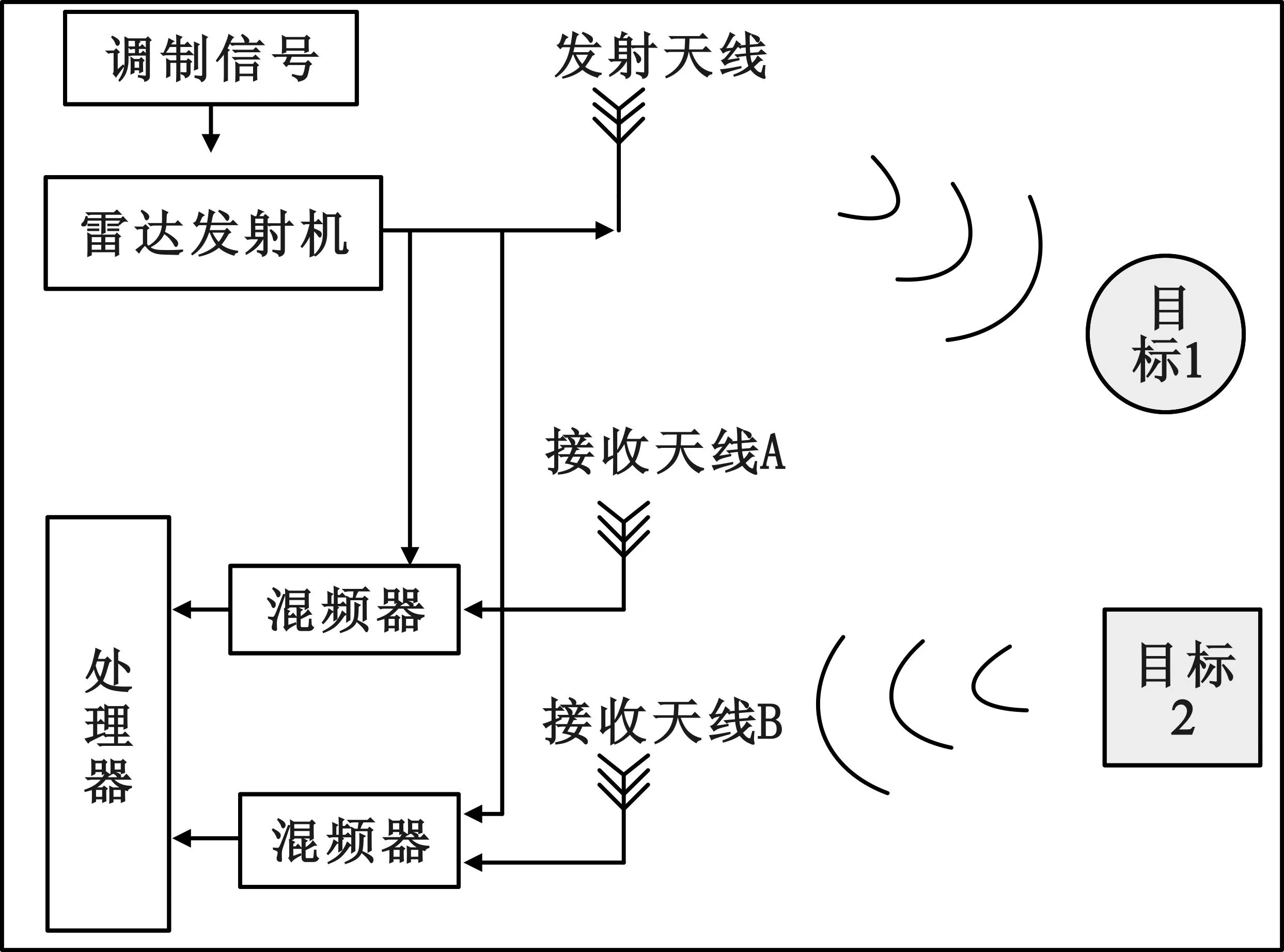
图1 雷达系统结构
FMCW算法中采用等斜率、周期不变的三角波作为雷达信号调制波。图2所示为多目标环境下, FMCW雷达系统发射波、反射波和中频信号的频率变化图,图3为与图2对应的中频信号频率变化图。其中fo为发射信号的基频,一般可从24 GHz和77 GHz中选择。BW为发射信号频带宽度,T为调制三角波的半周期,fu1和fu2分别为目标l在目标2 在频率上升段所对应的中频信号频率峰值,fd1和fd2则分别为目标l和目标2在频率下降段所对应的中频信号频率峰值。
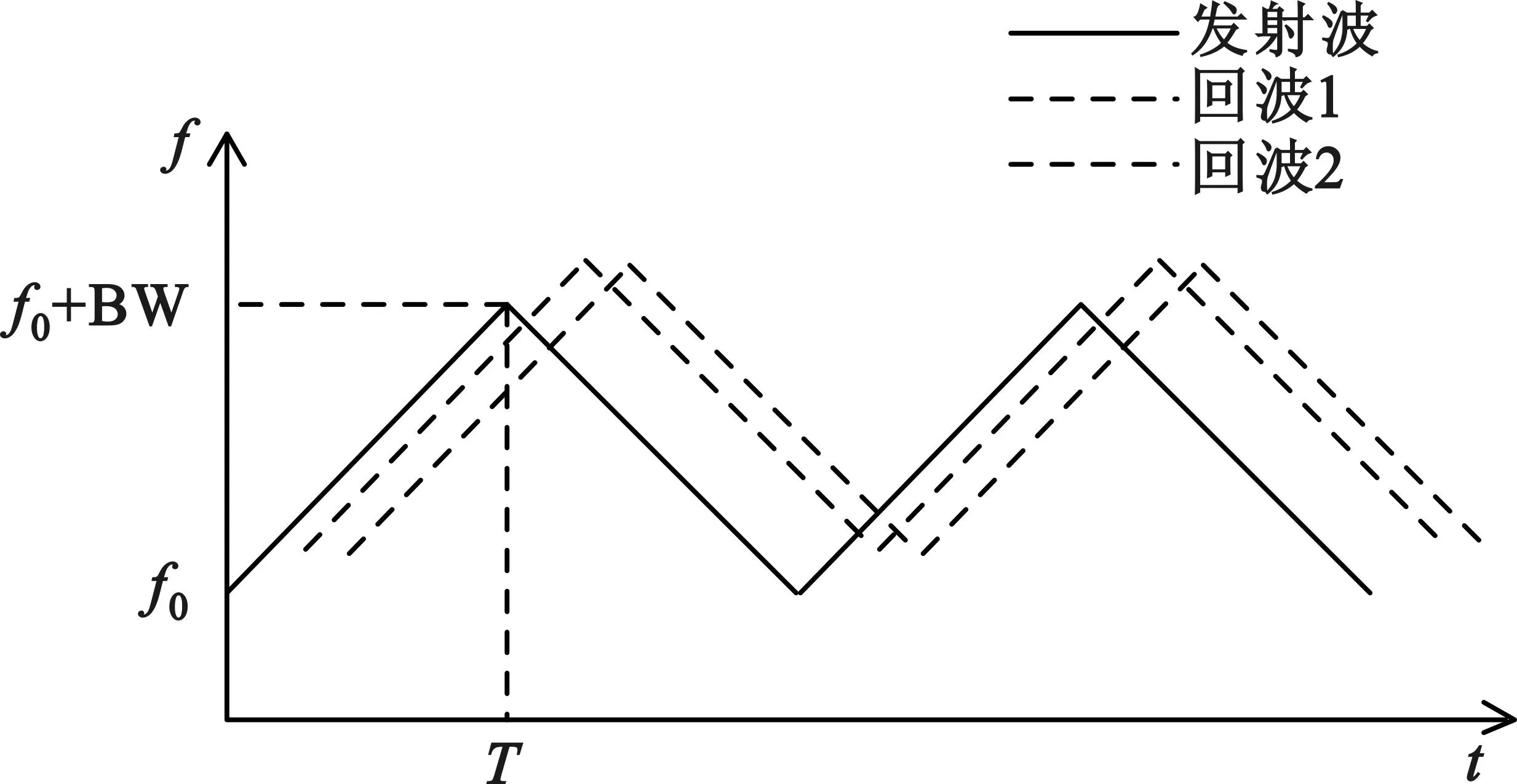
图2 发射波与回波频率变化图
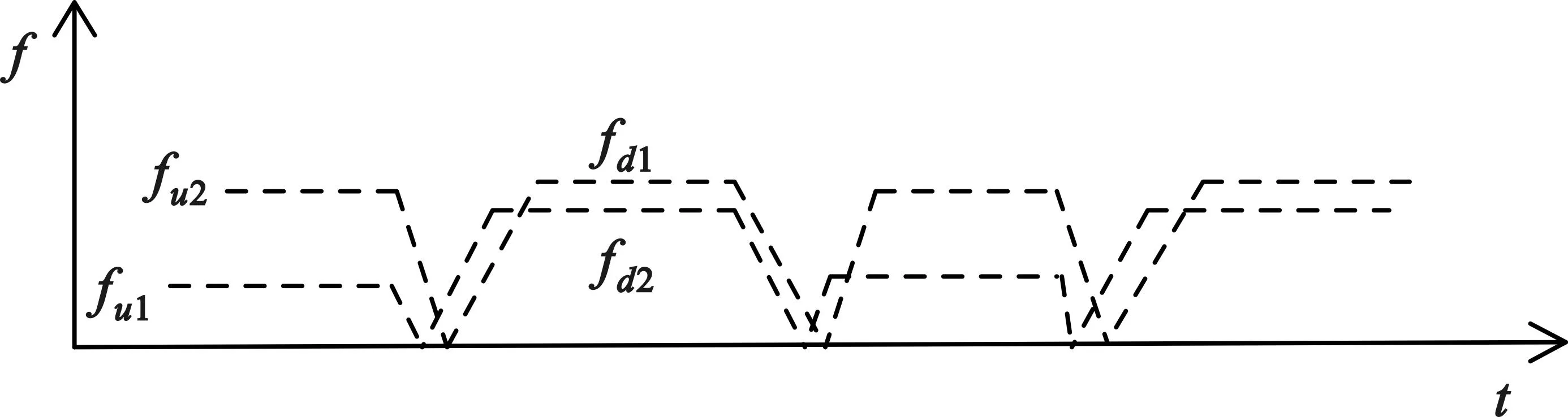
图3 中频信号频率变化图
图2中,由于时延和多普勒频移的作用,反射波相对于发射波产生了时移和频移。由图2可知,中频信号中存在频率稳定段和频率变化段,后者是由于发射回波时延引起的,信号处理主要针对频率稳定段。车载雷达一般用于检测1~200 m范围内的目标,最大回波延时为:
τmax=2·dm/c=1 μs
(1)
T一般为5~10 ms,τmax远小于T,所以频率变化段并不影响计算的精度,实际处理中可采用延时采样等方法避开这一段信号。
对于单目标检测,只需通过FFT检测出频率上升段和下降段中频信号的最大峰值频率代入下列公式即可:
(2)
(3)
但在多目标环境中,上升段与下降段将出现若干峰值频率,若将这些峰值频率一一对应进行计算,则会计算得到N2个目标,其中仅有N个真实目标。除了虚假目标的问题,传统的FMCW无法得到目标的角度信息,单凭距离和速度无法定位一个目标,双接收天线FMCW算法则可以很好的解决以上问题。
2改进的FMCW多目标检测
改进的算法中增加一个接收天线,两个接收天线A、B处于同一水平位置,A、B间距为d,且d远小于雷达与待测目标的距离,每个目标的发射回波到达接收天线A、B有一定的波程差Δs。
2.1频率上升段信号分析
取发射信号频率上升段信号进行分析,0~T内发射信号表示为:

(4)
其中,k=BW/T为调制波斜率,φ0为初始相位。设环境中有L个目标,第i个目标的距离为ri,则接收天线处发射信号的延时为:
(5)
接收信号则为:

(6)
其中φiδ是散射角。接收信号与原发射信号经混频器混频后输出的中频信号为:
(7)
(8)
其中,n(t)为噪声。
在另一个接收天线处,每个目标的回波信号与第一根天线的回波信号均有波程差,记为Δs。同第一根天线的处理,天线2接收信号混频后得到的中频信号为:
(9)
其中,
(10)
则上升段两个接收天线处回波信号相位差为:
(11)
2.2频率下降段信号分析
类似于上升段信号的分析,得到天线B处接收信号与发射信号混频后得到的中频信号如下:
(12)
则下降段A、B接收天线接收信号的相位差为:
(13)
由(11)和(13)式可以得出以下结论:
Δφui=Δφdi
(14)
同一个目标在上升段和下降段天线A、B处对应的峰值频率的相位差相等,不同目标的相位差则不等,由此可用于区分不同的目标。
2.3联合自适应频率匹配
FFT运算将连续的时域信号转换到离散的频域,由此造成了频谱相位的离散,实际计算得到的相位如下:
(15)
离散的相位会造成量化误差,影响匹配结果,在系统参数选择较宽松的情况下,这种误差尤其大,会造成目标的漏检。并且,FFT结果的相位在0~2π范围内,而真实目标的相位差则为φ+2kπ相位差较大的目标会被漏检。因此,不能单独使用相位差匹配法进行频谱匹配,由此引入相位差和功率差联合的匹配检测模型。
Y=α|Δφui-Δφdi|+β|ΔPui-ΔPdi|
(16)
只有当模型结果Y小于预设阈值,才将两个频率进行匹配。模型系数α、β在确定系统参数后,根据实验测试结果进行选择,由于相位差一般小于功率差,因此可适当增大α,以提高系统灵敏度。
阈值则采取自适应的方法自动设定。模型结果Y由系统参数及环境因素影响。因此在雷达系统设计完成后,进行模拟实验,模拟真实道路环境,分析数据,选择一个最佳的检测阈值,设定阈值浮动范围。自适应阈值调整的方法很多,其中一个方法是根据总峰值功率进行调整,当总峰值功率较大则适当减小阈值,总峰值功率较小则适当增大阈值。可通过模拟实验获取阈值调整曲线,用于系统阈值调整。
2.4方位角计算
当两天线之间的距离d远小于目标到天线的距离时,两天线接收到同一目标的反射信号的方位角近似相等,示意图如下:
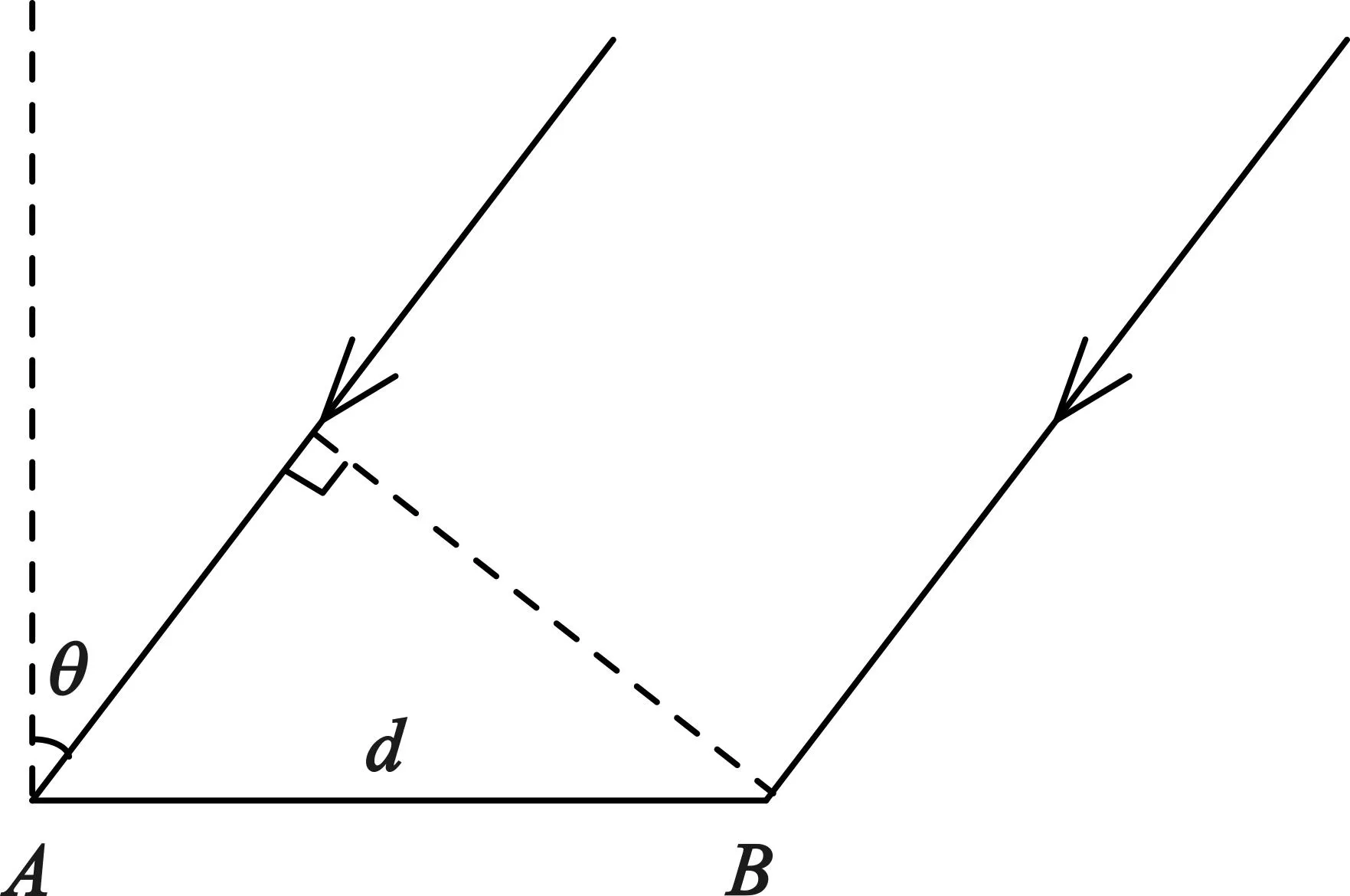
图4 双天线角度测量
由此得到A、B天线处接收信号的波程差和相位差之间的关系:
(17)
则目标物体的方位角为:
(18)
2.5算法流程
处理器收到混频器输出的中频信号后,算法处理流程如图5。
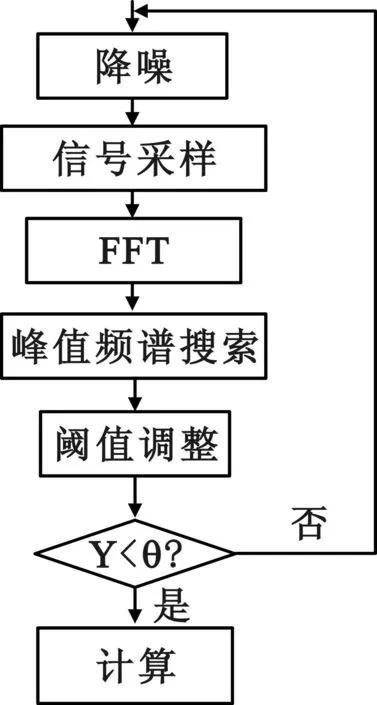
图5 算法流程
首先是降噪处理,滤除中频信号中的噪声可选用低通滤波方法。雷达信号基频一般选取24 GHz或77 GHz等非授权频段。但中频信号的频率却远小于雷达信号的频率。中频信号的频率主要由两部分频组成,一是反射回波时延造成的频差,二是目标相对运动产生的多普勒频移,考虑到车载雷达一般用于检测1~200 m范围内,速度在0~100 m/s的目标,中频信号最大频率一般在1 MHz左右。因此低通滤波可滤除中频信号中的杂波,提高信噪比。
然后是采样,A、B天线的信号同时采样。采样时须避开中频信号不稳定段,且保证上升段与下降段的采样不重叠,这可以通过适当的延时采样及定时循环采样来解决。采样频率应至少为输入信号频率的2倍,实际中可适当增大采样频率以获得更多的数据,但过大的采样频率则会降低后续计算结果的精度。
FFT模块将时域信号转换为频域信号用于后续频谱分析,具有快速浮点运算能力的DSP芯片很适合用来做FFT运算。
在进行频谱峰值搜索之前,先根据自动设定的阈值筛选出可能存在目标的频谱位置。阈值设定的方法有很多,如平均值法、最大值法等,可按实测情况选择合适的阈值。然后按照驼峰法分别找出天线A、B处信号的峰值频率,并计算每个目标在A、B天线处的上升段相位差Δφui、功率差ΔPui和下降段相位差Δφdi、功率差ΔPdi。
阈值调整需先设定阈值调整启动条件,一般在总峰值功率变化较大时进行阈值调整,然后根据阈值调整曲线进行调整。
将第五步得到的Δφui、ΔPui和Δφdi、ΔPdi代入联合检测模型进行频率匹配判定,判定成功则将这组数据代表的目标判定为同一目标,并进行后续的计算。若判定失败,则回到第一步,重新处理中频信号。
以上步骤涉及到双通道AD采样、浮点运算、FFT运算等,非常适合用DSP芯片来实现这些步骤。
3仿真分析
本次仿真设定的雷达检测目标范围为1~200 m,目标速度在0~100 m/s范围内,距离分辨率为Im。根据这一技术指标,将雷达系统各参数设置如下,雷达信号基频取常用的24 GHz,雷达信号带宽BW=600 MHz,调频信号半周期T=5 ms,天线间距d=1 mm,匹配模型参数α=0.83,β=0.17。
反射回波时延引起的最大频差:
(19)
最大多普勒频移:
(20)
因此采样频率应大于85.6 kHz,而为保证得到足够的采样数据,将采样点数设置为1 024点,因此将采样频率提高到300 kHz,以确保采样在5 ms内完成。
3.1静止目标检测
雷达位于(0,0)位置,生成5个待检测静止目标,坐标分别为(35.24,134.46)、(-19.22,65.47)、(-139.71,111.97)、(-37.52,53.11)、(-26.72,40.0)。仿真结果如下:
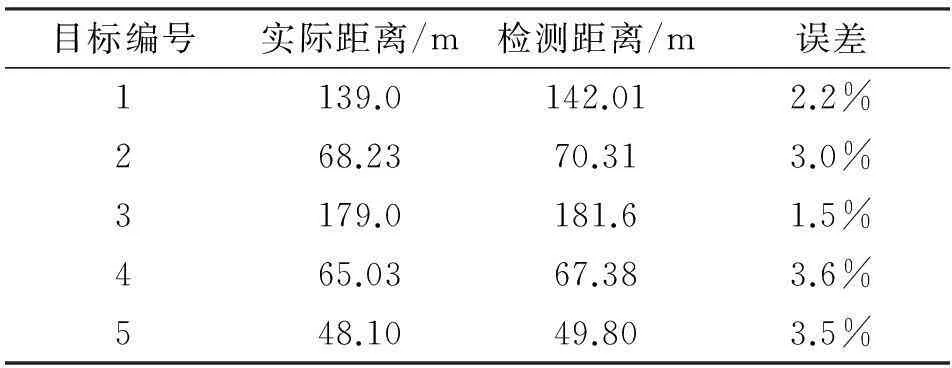
表1 距离检测结果
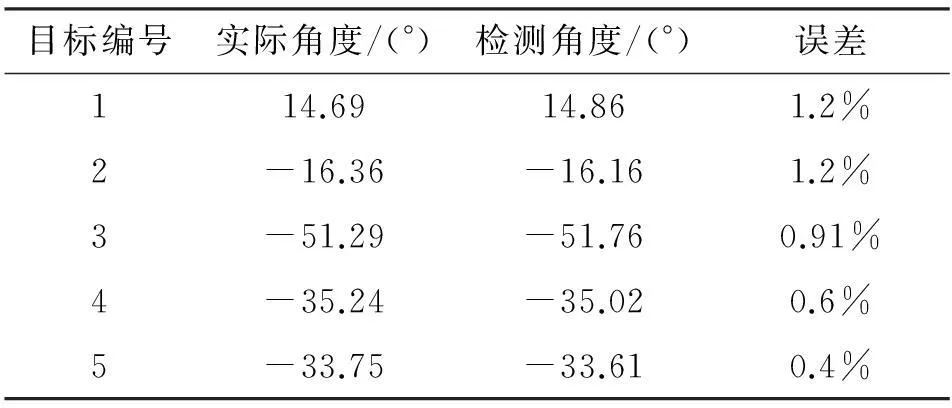
表2 角度检测结果
静止目标的速度检测均为0,这里略去。由表1表2可知,距离平均误差为2.8%,角度平均误差为0.86%。算法能准确的检测出多个静止目标的距离和角度,弥补了传统FMCW算法的不足。
3.2静止、运动目标检测
雷达位于(0,0)位置,生成16个目标进行仿真,其中3个静止目标,坐标为(37.81,24.18)、(53.45,73.43)、(-118.71,27.35)。13个运动目标坐标为(-124.39, 148.74)、(125.82, 69.74)、(108.85, 79.04)、(-27.38, 55.01)、(2.09, 149.19)、(34.49, 44.42)、(49.52, 91.37)、(86.90, 98.32)、(59.80, 133.97)、(26.32, 134.62)、(-47.44, 67.41)、(-68.71, 18.07)、(45.32, 108.27)。目标的速度位于表4中,仿真结果如下。
天线A处信号的频率变化和中频信号频率变化图如图5(只列出了其中3个目标的信号频率变化图)。
图5仿真结果(中频信号)
计算结果如下:
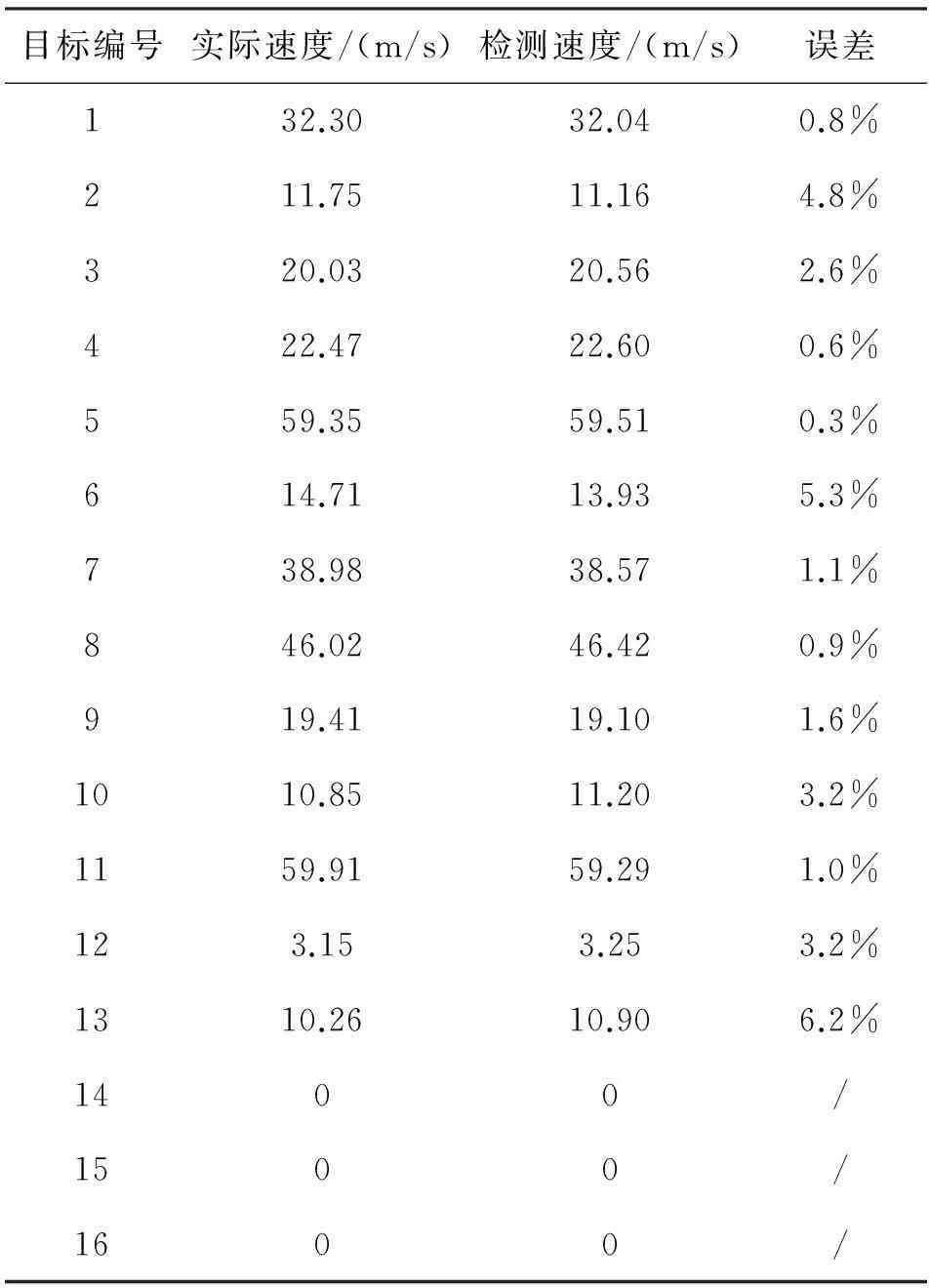
表4 速度检测结果
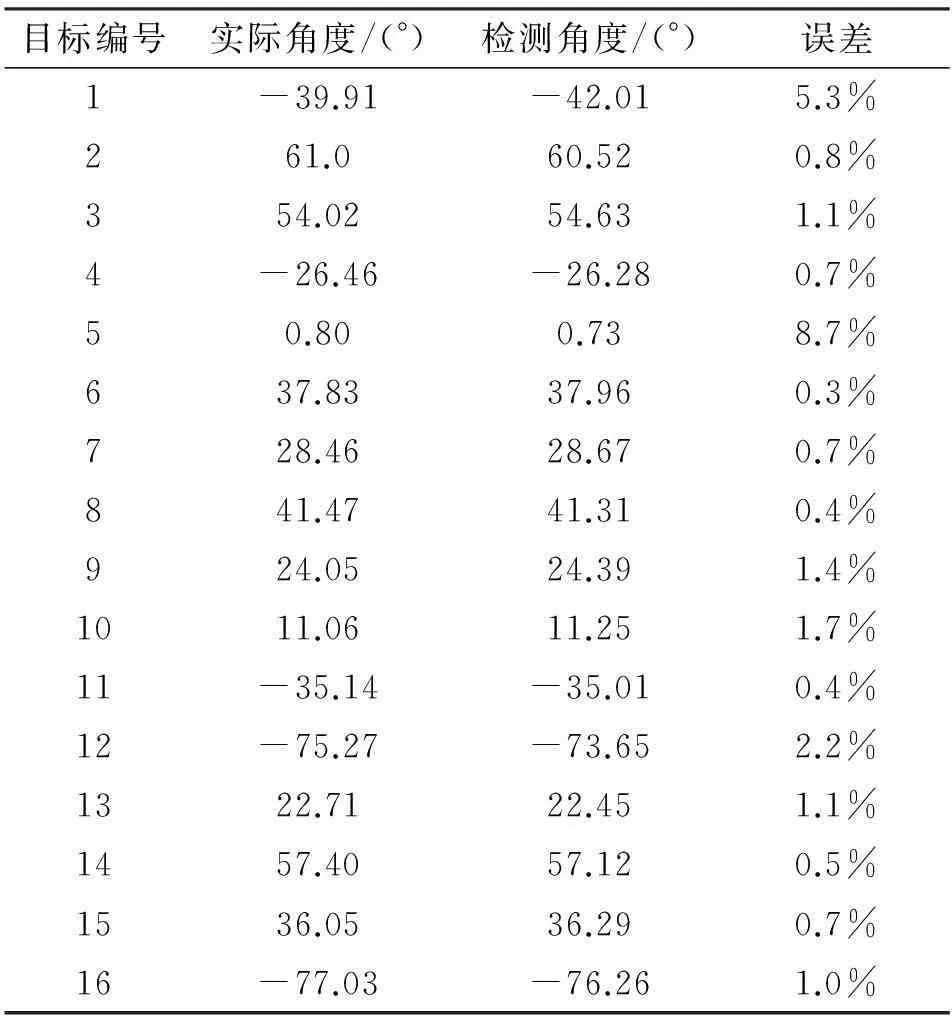
表3 方位角检测结果
由仿真结果知,距离检测平均误差为2.0%,速度检测平均误差为2.43%,角度检测平均误差为2.08%。部分速度、距离较小的目标误差较大是由于雷达的距离、距离分辨率较大造成的,可通过增大调制带宽等方法来减小误差,但这会提高对设备的要求,因此应根据需求来选择合适的系统参数。
仿真结果表明,改进的FMCW雷达目标检测算法能同时检测出多个静止目标和运动目标,且不仅可以计算得到目标的距离与速度,还能正确计算出目标的方位角,弥补了现有FMCW算法的不足。综上所述,本文所述算法准确有效,适用于多目标的快速、准确检测。
4结束语
本文针对传统FMCW雷达检测算法虚警、漏检、无法获得目标方位角的问题,提出了基于相位差和功率差联合频率匹配模型的FMCW雷达多目标检测算法。通过仿真分析,证实了该算法不仅能正确检测出多个目标的距离、速度和角度,有效解决了传统的FMCW算法虚警、漏检多目标问题。这样的算法性能已经足以运用到实际道路环境中进行目标检测,有效提高了智能驾驶的性能。但该算法在测量近距离目标、低速目标时误差相对较大,且计算速度仍有待提高,今后需要做进一步的研究。
参考文献:
[1]杨陶柳. 高分辨雷达多目标识别算法研究[D].电子科技大学,2013.
YANG Tao-liu. Multi-Target Recognition Algorithm of High Resolution Radar[D]. University of Electronic Science and Technology of China, 2013.
[2]黄文奎. 毫米波汽车防撞雷达的设计与实现[D].中国科学院研究生院(上海微系统与信息技术研究所),2006.
HUANG Wen-kui. Design and Production of Millimeter-Wave Automotive Radar for Collision Avoidance Application[D]. Graduate University of Chinese Academy of Sciences(Shanghai Institute of Microsystem and Information Technology), 2006.
[3]许人灿,邱兆坤,姜卫东. 基于DSP的雷达目标检测和跟踪方法研究[J]. 现代雷达,2003,25(02):35-37.
XU Ren-can, QIU Zhao-kun, JIANG Wei-dong.Study of Radar Target Detecting and Tracking Methods based on DSP[J]. Modern Radar, 2003, 25(02):35-37.
[4]屈飞园,曹宁. 车载FMCW雷达准确检测多目标的一种有效方法[J]. 科学技术与工程,2012,12(06):1263-1267.
QU Fei-yuan,CAO Ning. An Effective Method to Detect Multi-Target based on Vehicle FMCW Radar[J]. Science Technology and Engineering,2012,12(06):1263-1267.
[5]Rohling H. Some Radar Ropics: Waveform Design,Range C far and Target Recognition[M]. Advances in Sensing with Security Applications. Springer Netherlands, 2006: 293-322.
[6]Gini F. Waveform Design and Diversity for Advanced Radar Systems[M]. The Institution of Engineering and Technology, 2012.
[7]Shin I H, Park Y M, Kim D W. Fabrication of High-Frequency Packages for K-Band CMOS FMCW Radar Chips Using RF Via Structures[J]. The Journal of Korean Institute of Electromagnetic Engineering and Science, 2012, 23(11): 1228-1238.
[8]李军显,沈丽民,杨硕. 一种基于SVM的雷达目标识别算法[J]. 通信技术,2009,42(01):300-302.
LI Jun-xian, SHEN Li-min, YANG Shuo. A SVM-based Radar Target Recognition Algorithm[J]. Communications Technology, 2009,42(01):300-302.
[9]赵寅,周新志. 雷达信号处理中动目标检测的研究[J]. 通信技术,2011,44(03):139-140.
ZHAO Yin, ZHOU Xin-zhi. Study on Radar Signal Digital Processing Technology in the Detection of Moving Targets[J].Communications Technology, 2011,44(03):139-140.
杜佳(1991—),男,硕士研究生,主要研究方向为雷达信号处理;
宋春林(1973—),男,博士,副教授,主要研究方向为移动通信、感知与嵌入式系统。
A Modified Millimeter-Wave Radar Multi-Target Detection Algorithm
DU Jia,SONG Chun-lin
(College of Electronics and Information Engineering, Tongji University, Shanghai 201804, China)
Abstract:Intelligent driving relies on forward-looking radar for target detection, and recently multi-target detection algorithm based on millimeter-wave radar becomes a research hotspot. However,certain deficiencies still exists in the traditional FMCW radar target detection algorithm, induding false alarm, missed detection, and so on,thus being unable to obtain the azimuth information of the targets, so this traditional algorithm couldn′t be used in complex and variable road conditions. Based on the traditional FWCW algorithm,a modified millimeter-wave radar algorithm is proposed, and the idea of joint matching model by phase difference and power difference to match the frequency is given, thus fairly solving the problems in FMCW, such as frequency error matching and missing azimuth information of targets. Multi-target simulation and actual measurement indicate that this new algorithm,reliable and stable performance could correctly detect the distance, speed and azimuth of multiple targets.
Key words:millimeter-wave radar; multi-target detection; FMCW; false-alarm
作者简介:
中图分类号:TN929
文献标志码:A
文章编号:1002-0802(2015)07-0808-06
基金项目:上海市自然科学基金(No.14ZR1442700)
收稿日期:修回日期:2015-05-15Received date:2015-03-01;Revised date:2015-05-15
doi:10.3969/j.issn.1002-0802.2015.07.012
