STATCOM系统中信号延时的改进方法研究
2016-01-20巫付专,韩梁,冯占伟
STATCOM系统中信号延时的改进方法研究
巫付专, 韩梁, 冯占伟
(中原工学院, 郑州 450007)
摘要:针对现阶段STATCOM系统中存在的信号延时问题,从STATCOM拓扑结构、基本原理、检测算法、信号调理和控制策略等方面进行分析,提出了改进延时的方法。基于瞬时无功理论的ip、iq电流检测算法实时性高,在电流检测中加入预估补偿角度补偿延时,有效减少了系统延时。运用基于滞环的双环控制策略调制产生PWM驱动信号,稳定性高。对STATCOM系统进行MATLAB仿真,并搭建实验样机,仿真和实验验证了该方法的可行性。
关键词:STATCOM;信号延时;检测算法;预估补偿;滞环控制
收稿日期:2014-11-15
作者简介:巫付专(1965-),男,河南安阳人,教授,主要研究方向为电力电子与电力传动及电能质量调节。
文章编号:1671-6906(2015)04-00014-06
中图分类号:TM464.21
文献标志码:A
DOI:10.3969/j.issn.1671-6906.2015.04.004
Abstract:According to the signal delay problem in the present STATCOM systems, this article carries on the analysis to the signal time delay from the STATCOM topology structure, basic principle, detection algorithm, signal conditioning and control strategy and so on, and put forward the method of improving the time delay. This paper adopts the ip,iq current detection algorithm based on the theory of instantaneous reactive power, high real time capability, and adds predictive compensation angle to compensate the delay time in the current detection, effectively reduces the system delay; Using the double loop control strategy based on hysteresis loop PWM modulation to generate drive signal, high stability; Then using MATLAB simulates the STATCOM system and builds the experimental prototype. Simulation and experimental results verifies the feasibility of the method.
STATCOM是对电网中谐波抑制和无功补偿的有效装置,是谐波治理和无功补偿技术的发展方向。作为一种动态补偿装置,它对实时性要求较高。系统信号延时问题对系统实时性会造成一系列影响。文献[1]虽然对系统各环节引入的延时做了相应分析,但是没有提出解决方法;文献[2]提出了谐振注入式解决延时方法,但是其硬件电路复杂,且要求开关频率较高;文献[3]在电流检测算法上做了延时补偿,但是对于其他延时环节没有给予相应分析;文献[4]从死区效应和控制策略上提出了改进方法,但是运算过程繁杂,容易给控制器带来负担。本文从STATCOM系统结构及原理、信号检测算法和控制策略,以及产生信号延时的角度出发,提出了减少系统延时的有效方法。
1STATCOM拓扑结构和基本原理
本文主要采用电压型桥式电路拓扑结构的STATCOM系统,如图1(a)所示,主电路主要由直流侧电容、三相逆变桥、输出滤波器组成。直流侧电容的主要作用是为系统提供一个稳定的直流工作电压。系统采用三相三线制结构。
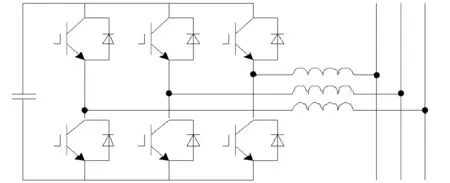
(a) STATCOM电压型桥式拓扑结构
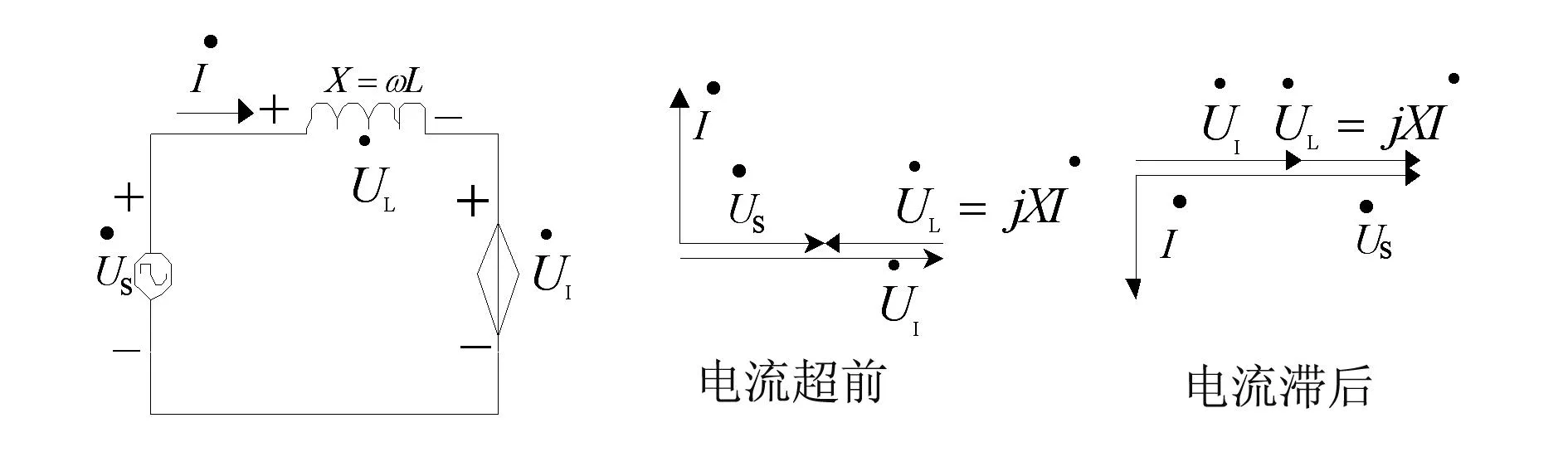
(b) 单相等效电路 (c) 相量图 图1 STATCOM拓扑结构及工作原理图
电压型STATCOM单相等效电路及工作原理如图1(b)所示。STATCOM可以被等效为一个可控的交流电压源,其频率、相位与电网相同,幅值大小可调。STATCOM装置通过电感与电网相连。当STATCOM输出电压幅值超过电网电压幅值时,电感上的电压将会与电网电压反相,根据电感的电流滞后电压90°的性质,可以得到超前于电网电压的电流,这时,STATCOM发出容性电流;同理,当STATCOM输出电压幅值小于电网电压幅值时,电感上的电压与电网电压同相,根据电感的电流滞后电压90°的性质,可以得到滞后于电网电压的电流,这时,STATCOM发出感性电流,如图1(c)所示。因此,改变STATCOM输出电压的大小,可以使STATCOM发出感性或容性电流。
上述间接控制法便于理解容性、感性电流的产生。为了提高实时性,实验中采用直接控制法,即:直接检测电流信号和电网电压的相位,参与运算,以此产生容性、感性无功电流。同时,STATCOM也可检测谐波信号,而指令信号中含有谐波和无功信号,因此STATCOM可以补偿感性或容性无功负载并滤除谐波,达到滤除谐波和补偿无功的目的。
2产生延时的环节
2.1AD转换引起的延时
以DSP2812为例,系统采用DSP2812内部AD采集芯片,其采样保持器集成在AD转换器内部,数据采集产生的延时随着AD转换器的不同而存在差异。高速AD转换芯片从数据采样保持到微处理器接受,再到转换结果(三相数据), 只需几微秒,而慢速的AD转换芯片可能需要几十甚至上百微秒。
2.2信号采集与调理电路引起的延时
电流互感器属于信号变换电路,它们的一次电流、电压波形和二次电流、电压波形的相位并不完全一致,二者之间存在一定的误差。在不加相位误差补偿时,其较大的相位误差可达1°,即在工频50 Hz 时,二次电流波形滞后一次电流波形56 μs。另外,调理电路本身以及信号滤波也会产生一定的延时。
2.3LC滤波引起的延时
STATCOM系统输出的补偿信号通过输出LC滤波器,注入电路后会出现一定的相移,这也是一种延时。该相移在滤波器设计参数确定之后是一定的。这部分延时可在硬件调理电路前加入RC移相电路来解决。
2.4控制器运算引起的延时
微处理器对数字信号计算处理会造成系统延时,耗时长短与选用的微处理器类型、检测方法及控制策略有关:若选用普通单片机,则耗时较长;若选用TI公司的TMS320F2812DSP芯片,单就谐波检测算法而言,采用ip、iq算法计算指令电流,那么从读取采样结果到发出三相PWM脉宽数据大约需要450条指令,需要3 μs,耗时较短。另外,为了避免上下桥臂直通,常常在上下桥臂中的一个管子关断之后,另外一个管子导通之前,加上适当的死区时间。根据选用的开关管不同,要求的最小死区时间也不尽相同,死区时间要大于开关管的最大关断时间。当选用三菱公司的PM600HSA120IGBT模块时,可认为系统的开关时间为6 μs。
3检测算法的延时补偿
3.1基于ip、iq检测方式的延时补偿
指令电流的实时检测在很大程度上决定了STATCOM装置的动态性能。因此,提高指令电流的实时检测速度是提高STATCOM装置动态性能的关键方法。文献[5]提出的基于瞬时无功功率理论的ip、iq检测方式能够实时快速检测负载电流(见图2)。
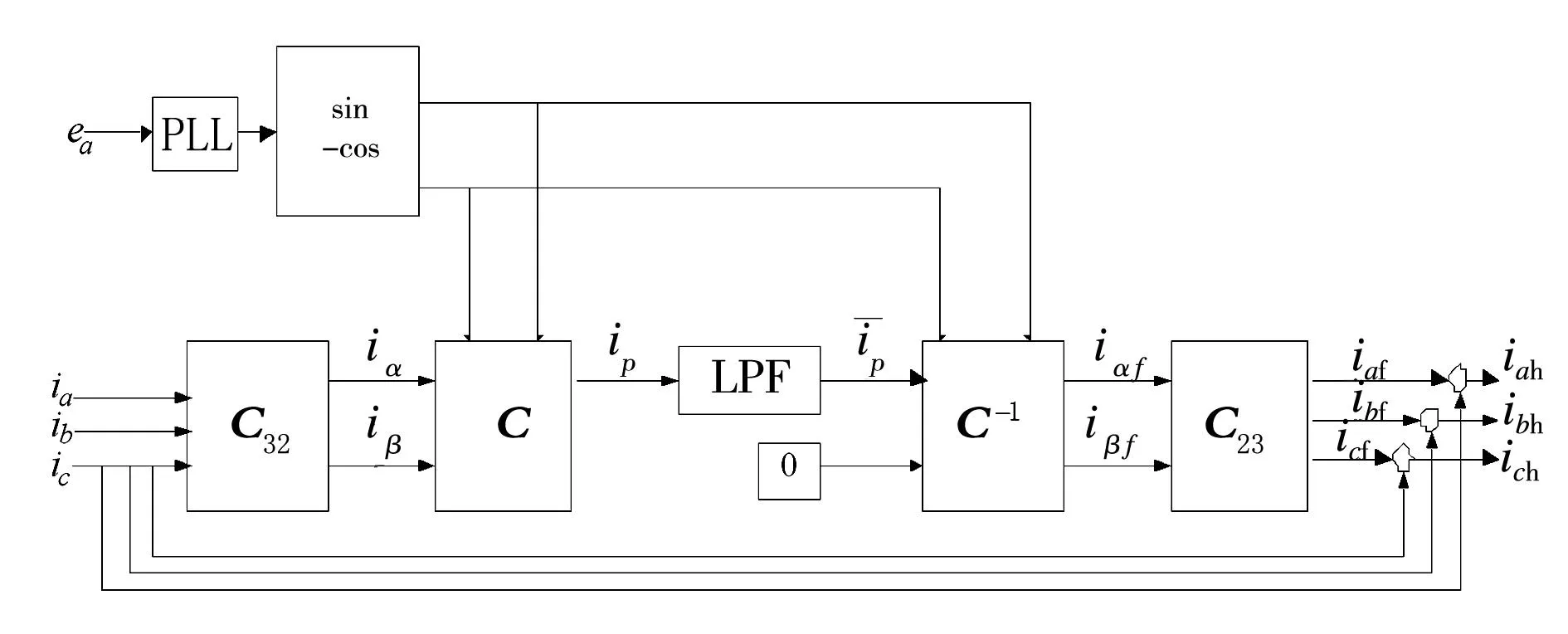
图2 ip、iq瞬时值检测法原理图

(1)

(2)
C32是从三相abc坐标系到αβo坐标系的变换矩阵,C是αβo坐标系下的瞬时功率定义矩阵,C-1是C的逆矩阵,LPF是低通滤波器,C23是从αβo坐标系到三相abc坐标系的逆变换矩阵,ea是网侧a相电压,ia、ib、ic是被检测电流。
(3)
(4)
将基波有功分量分别和相应的被检测电流相减,可以得到相应的谐波分量和无功分量之和的指令电流iah、ibh、ich:
(5)
ip、iq检测方式存在的时间延迟至少为1个开关周期。在延时一定的条件下,因存在延时滞后,不同次谐波与对应的实际谐波分量的相位角并不相等。假设延时150 μs,STATCOM发出的基波电流(或基波电压)滞后实际电流(或电压)2.7°,7次谐波滞后实际值18.9°。那么,第n次谐波滞后实际值的角度为:
(6)
因此,采用图2所示的 ip、iq检测方式难以将上述滞后角度预先加在算式中来补偿时延。
3.2基于ip、iq指定次谐波检测方式的延时补偿
第n次谐波电流检测方法需在锁相环前加上n倍频,然后将图2中变换矩阵C、C-1相应地改成Cn、Cn-1,可由上述方法检测出第n次补偿的谐波电流ian、ibn、icn。这里,
(7)
由于STATCOM自身的延时可等效为第n次旋转变换Cn中的延时角度Δθn,因此若进行Cn-1变换时加上该角度就能对延时进行补偿:
(8)
图3展示了这一过程的原理。
这么说,事情是没有商量的余地了,佟老板把眼镜带上笑眯眯地看着我。我知道那笑里是什么,我也笑着说,既然佟老板知道了我老头子的意思我就不再罗嗦了,欢迎佟老板来这里钓鱼,修身养性,就是我老头子把鱼亲自送到府上也行。

图3 基于ip、iq指定次谐波检测法延时补偿原理图
数字化控制器的延时是一定的,可预先得出各次谐波的延时滞后角度Δθn。如果在需要检测的各次谐波的检测环节分别加入各自的补偿角,则可补偿各次谐波的延时。
4控制策略
从控制方法上看,STATCOM系统可以分为直接电流控制和间接电流控制两种方法。直接电流控制就是将STATCOM系统等效成一个可控的交流电流源。直接电流控制是对实际电流进行实时反馈,通过与指令电流的比较,采用滞环比较、三角波比较等PWM控制技术来控制输出电流。间接电流控制是通过控制三相逆变器输出基本电压的幅值和相位来实现的,多被用于容量较大的应用场合。间接控制可采用SPWM或SVPWM方法。在过零点附近,受PWM开关噪声的影响,正确检测难度较大,考虑到开关器件的固有特性和零电流钳位现象,用传统补偿方法来消除周期性误差很难。虽然提高采样频率能相对缩短控制信号的更新周期,可有效减小控制误差,但是提高采样频率却增加了处理器的计算任务,进一步延长了控制器处理信号所用的时间,而且占用的存储空间也会增加。
本文在直接电流控制中引入瞬时无功率理论[1],采用dqo坐标变换从三相电流中分离出含有谐波和无功的指令电流信号,并与反馈的补偿电流信号进行比较,再采用滞环控制方法进行调制,从而产生驱动信号,使实际电流快速跟踪指令电流的变化。该方法实时性高,可有效减小周期性误差。
STATCOM滞环控制策略如图4所示。Udc*为直流侧电容电压的给定信号, Udc为其反馈信号。Udc*与Udc比较后得到误差信号,再经PI调节后叠加到有功通道中,用于交直流侧能量交换,以稳定直流侧电压。然后,利用基于坐标变换瞬时无功理论的ip、iq检测算法计算出指令电流信号iabc*。滞环控制是将指令电流iabc*与实际反馈的补偿电流iabc做差,所得误差信号与设定的环宽比较,从而产生PWM信号,驱动逆变器,使输出信号跟随指令信号变化,达到补偿无功和消除谐波的目的。

图4 基于滞环的双环控制策略原理图
5MATLAB仿真及实验样机
5.1MATLAB仿真
为了验证本方法在三相三线制STATCOM系统中的应用,采用MATLAB/Simulink仿真软件对STATCOM系统进行了仿真。仿真的主要参数为:电网相电压有效值为220V,负载为8mH电感和10Ω电阻串联,设计滞环环宽为5A,开关频率为12.8kHz,直流侧电压为800V,输出滤波电感L为1.47mH,输出滤波电容为2 200μF。只要器件选定,硬件延时基本确定,仿真中设基波延时为2.7°,那么5、7、11、13次谐波就会分别延时13.5°、18.9°、29.7°、35.1°。
STATCOM系统的主要仿真包括全部补偿仿真模型(见图5)、分步补偿部分仿真模型(见图6)和各次谐波补偿延时仿真模型(见图7)。主要仿真波形如图8所示。其中:图8(a)是逆变器直流侧电压波形Udc,直流侧电压能很快达到稳定;图8(b)是STATCOM系统在没有补偿延时的情况下,电网侧a相电流波形;图8(c)是在补偿了延时的情况下,电网侧a相电流波形。比较可知,采取延时补偿措施后,电网侧电流波形明显减少了毛刺;图8(d)和(e)分别是采取延时补偿措施前后电网侧电流谐波分析图。可看出,补偿延时之后5、7、11、13等各次谐波含量都会降低,THD值为2.28%。图9为指令电流跟踪波形图。显然,补偿电流能够很好地跟踪指令电流。

图5 全部补偿仿真图
对以上仿真波形综合分析可知,采取延时补偿的STATCOM系统启动后,直流侧电压快速保持稳定,能够保证电网侧电流为正弦波形,且毛刺很小,减小了延时给系统带来的影响,实现了消除谐波和补偿无功的目的。
5.2实验样机
针对本文提出的方法搭建了实验样机(见图10)。其主要由交流电源、DSP控制器、逆变器、滤波器、调理电路、过零检测电路、光隔驱动电路以及负载组成。主控芯片采用TI公司的DSP2812芯片。开关器件选取三菱公司的IGBT开关管,型号为PM600HSA120IGBT。整流桥型号为SQL50A1000V,采用ZMPT101B电压互感器检测电压,采用ZMCT112B电流互感器检测电流。样机输入电压为AC220V,开关频率选取12.8kHz,输出滤波电感为5mH,输出滤波电容为10μF。实验中采用了泰克示波器及其标配电流钳,检测补偿后的电流波形如图11所示。

图6 分步补偿仿真图

图7 各次谐波补偿延时部分仿真图
由图11可以看出,经过STATCOM系统补偿后,电网侧电流波形呈现较好的正弦波形,有效降低了信号延时对系统的影响。

(a)直流侧电压波形
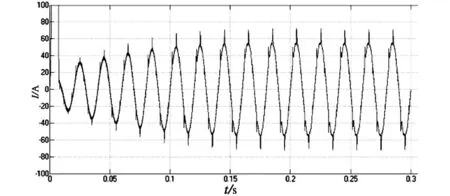
(b) 没有补偿延时情况下电网侧电流波形

(c) 延时补偿后电网侧电流波形

(d) 没有补偿延时情况下电网侧电流谐波分析

(e) 延时补偿后电网侧电流谐波分析 图8 STATCOM系统的主要仿真波形图
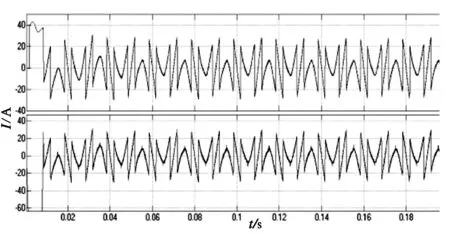
图9 指令电流信号跟踪波形图

图10 STATCOM系统硬件结构图
6结语
本文针对STATCOM系统信号延时问题提出了改进方法,从检测算法、控制策略等产生延时的角度出发,采用瞬时无功理论检测电流,并在算法中加入预估补偿角度来减小延时,用滞环控制的双环控制策略控制产生的补偿信号,并在硬件电路前端加入RC移相电路来补偿延时,最后对系统进行了MATLAB仿真。仿真结果显示,补偿后的电流THD值为2.28%,符合国家标准中5%的要求。针对改进的方法搭建了实验样机,用实验结果验证了本文方法的可行性。
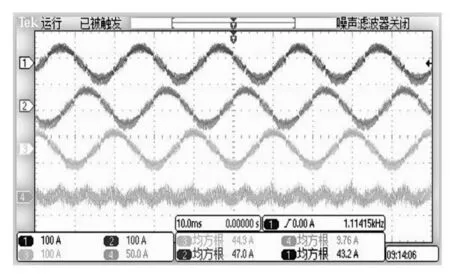
图11 检测补偿后的电流波形
参考文献:
[1]肖红霞,范瑞祥.有源电力滤波器延时分析[J].电气传动, 2006, 36(10): 33-36.
[2]范瑞祥,罗安,唐杰.谐振注入式有源滤波器数字化控制系统延时研究[J].中国电机工程学报, 2007, 27(13): 105-110.
[3]刘俊岭,杨耕,耿华,等.数字化有源滤波器时延补偿方法的分析和验证[J].电力电子技术, 2007, 41(11): 31-33.
[4]夏向阳,罗安.有源滤波器控制延时的新型补偿方法[J].电工技术学报, 2008, 23(11): 167-172.
[5]王兆安,杨军,刘进军.谐波抑制和无功功率补偿[M].北京:机械工业出版社,1998.
(责任编辑:王长通)
Research on the Improvement Method of Signal Time Delay
in STATCOM System
WU Fu-zhuan,HAN Liang,FENG Zhan-wei
(Zhongyuan University of Technology, Zhengzhou 450007, China)
Key words:STATCOM; signal time delay; detection algorithm; predictive compensation; hysteresis loop