基于状态空间法的风机传动链振动控制
2016-01-19,,,
,,,
(1.许昌许继风电科技有限公司,河南 许昌 461000;2.中继威尔停车系统股份有限公司,河南 许昌 461000 )
Vibration Control of Wind Turbine Drive Chain Based on the State Space Law
YUE Hongxuan1,LU Xiaoguang1,LI Fengge2,XU Ming1
(1.XJ-Windpower Technology Company,Xuchang 461000,China;2.Zhong Ji Well Parking System Co.,Ltd.,
Xuchang 461000,China)
摘要:为深入分析风机传动链的动态特性,并实现传动振动控制的定量分析。推导了传动链数学模型,进而建立了传动链状态空间方程。基于状态空间方程,讨论了传动链振动控制的方法,并研究了传动链加阻带通滤波器传递函数设计依据。然后通过实例化设计实验了整个分析过程的实例化。通过bladed仿真和现场验证,证明了控制策略的有效性。
关键词:传动链;状态方程;振动控制;bladed仿真
基于状态空间法的风机传动链振动控制
岳红轩1,卢晓光1,李凤格2,许明1
(1.许昌许继风电科技有限公司,河南 许昌 461000;2.中继威尔停车系统股份有限公司,河南 许昌 461000 )
Vibration Control of Wind Turbine Drive Chain Based on the State Space Law
YUE Hongxuan1,LU Xiaoguang1,LI Fengge2,XU Ming1
(1.XJ-Windpower Technology Company,Xuchang 461000,China;2.Zhong Ji Well Parking System Co.,Ltd.,
Xuchang 461000,China)

摘要:为深入分析风机传动链的动态特性,并实现传动振动控制的定量分析。推导了传动链数学模型,进而建立了传动链状态空间方程。基于状态空间方程,讨论了传动链振动控制的方法,并研究了传动链加阻带通滤波器传递函数设计依据。然后通过实例化设计实验了整个分析过程的实例化。通过bladed仿真和现场验证,证明了控制策略的有效性。
关键词:传动链;状态方程;振动控制;bladed仿真
收稿日期:2015-06-11
中图分类号:TM614
文献标识码:A
文章编号:1001-2257(2015)10-0030-04
Abstract:To deeply analyze the dynamic characteristics of the wind turbine drive chain and realize the quantitative analysis of drive chain vibration control,we derived the mathematical model and then established the state space equation of drive chain. According to state space equation,we studied the control method of drive chain vibration and the design basis of add resistance and band-pass filter of transferring function for. Doing experiment the entire analysis process instantiation by design experiment. The effectiveness of control strategy has been proved by bladed simulation and field test.
作者简介:岳红轩(1981-),男,河南濮阳人,硕士,工程师,研究方向为电力系统自动化和风机控制;卢晓光(1983-),男,河南许昌人,硕士,工程师,研究方向为机电一体化。
Key words:drive train;state equations;vibration control;bladed software
0引言
风电作为新能源行业的重要组成部分,发展前景广阔,风机核心技术的研究已成为国内学者关注的焦点[2-]3]。振动控制是风机控制器设计的重点内容[4-]5],作为风机重要的组成部分传动链的振动控制,更是受到业内人士的普遍关注[6-]7]。传动链振动加阻控制早已有学者研究,并在风场上得到应用。但之前的研究建立在加阻控制的定性分析基础上,加阻传递函数设计也基于传递函数本身这一局部去研究的,使用过程中参数的选取依赖于经验和现场实验。
基于整机传动系统推导了传动系统数学模型,在系统状态方程中研究加阻控制对传动链振动的影响程度。以整机振动特性为依据,研究加阻函数选取依据,通过bladed软件来完成仿真验证工作。通过分析,从理论角度定量分析了传动链振动控制的实现原理及实现过程,并利用仿真和现场采集数据后处理验证了分析的有效性。
1风机传动链状态方程的建立
1.1 风机传动链数学模型的推导

(1)
(2)
(3)
Jr为风轮惯量;qr为风轮方位角;Taero为风轮气动力矩;Tshaft为轴力矩;K为传动轴总刚度;C为传动轴总阻尼;qg为折合到低速轴的电机扭转角;Jg为折合到低速轴的电机惯量;Tg为折合到低速轴的电机转矩。

(4)
W0为平衡点处风速稳态值;qr0平衡点处转速稳态值;β0为平衡点处桨距角稳态值;δW为扰动值;hots为线性化后的高阶项,因对系统影响较小,可以忽略。
转矩的扰动为:
(5)
令Tshaft0为平衡点处传动轴转矩值,因平衡时风轮吸收扭矩与发电机提供给转动轴的轴扭矩达到平衡,则:
(6)
由式(1)可知:
利用(6)式可得:
(7)
由式(2)可得:
(8)

(9)
同理,平衡点处传动轴转矩和电机转矩维持平衡状态,则由式(3)可得:
(10)
1.2 传动链状态空间的建立
基于实际模型自由度考虑,传动链扭转力3个状态量,如果再增加状态量,则方程可控可观测性将发生变化,变为非最小系统。
由式(9)得:
(11)
对x2求导可得:
=Kx1-Kx3
(12)
由式(10)得:
(13)
根据式(11)、式(12)、式(13),以电机转矩的变化率为控制量,以电机转速为变化率为输出量,列写状态方程为:
(14)
(15)
2传动链减振控制设计
2.1 传动链振动控制器设计
传动链的振动由于风速和变桨角度等外部激励的变化,导致状态量x1首先变化,而变速电机提供给传动链的阻尼很小,传动链阻尼C也非常小,从而导致传动链上扭转力矩变化较大,即系统状态量波动较大,从而导致系统输出量x2的较大变化。
传动链控制可以检测电机转动速度的变化,给电机以与电机转速成正比且方向相反的扰动力,这样一个力正好可以通过转矩给定控制中加入转矩的扰动控制量给出。
基于式(14)的控制方程,传动链控制加阻系统框图如图1所示。其中K1为 控制增益部分,G(s)为一个带通滤波器,对转速变化进行有目的选择,以适应风机特性。传动链系统最容易引入的有规律振动为叶片面内二阶振动时3个叶片同时向一侧摆动的模态,而电机扭矩正常响应此模态引入的传动链转速波动后,不但不能控制传动链的振动,反而会加剧叶片此频率下的波动,需对此频率点增加较大阻尼,以此设计确定滤波器参数。

图1 传动链系统框图
传动链阻尼滤波器的传递函数可表示为:
(16)

加阻传递函数的加入,等效于系统方程阻尼的增加。深入分析系统方程可知,加阻算法并不等效于传动轴阻尼C值的增加,而是式(14)系统方程行列式第3行第3列数值的变化,不难得出增加电机微扰动力的加阻效果与电机等效到低速轴的惯量成反比。
2.2 传动链振动控制实例化分析
以许继2MW风机数据为例,研究传动链系统特性及控制器特性。并应用风电行业普遍使用的bladed软件进行控制效果验证。
风机的风轮惯量为9.22e6 kg·m2,电机折合后等效惯量为1.63e6kg·m2;传动轴等效刚度为5.13e8N·m/rad;传动轴等效阻尼为3.4e4N·m/(rad/s);以风速12m/s为平衡点风速,由bladed计算出相应平衡点处f,e,g的值,即可分析系统方程的特性。记式(14)特征矩阵为A,且计算得f=-577028N·m/(rad/s),则

(17)
计算得A的3个特征值为-0.053,-0.017 + 19.245i,-0.017 - 19.245i。由特征值可以看出,3个特征值实部距离虚轴较近。
设计电机侧增加阻尼比值为原电机阻尼值的77倍,重新计算特征矩阵A的特征值,得到结果为:-0.292,-0.69 + 19.225i,-0.69 - 19.225i。
由结果可知,系统稳定性大为改善。现根据传动比参数,把提供系统77倍阻尼力的值折合回高速轴电机侧,计算电机扰动最大力矩为200N·m。
2.3 带通滤波器实例设计
依据bladed软件计算出来的坎贝尔图信息,传动链模态频率为2.45Hz,则取ωc为15.386 rad/s,低频截止点选择为2.3 Hz,高频截止点选择为2.6 Hz,则可知Q为8.15。
此带通滤波器传递函数为:
(18)
图2为滤波器的幅频特性bode图,其增益根据阻尼值需求配置,在传递函数中不配置增益值。

图2 带通滤波器bode图
风机的风轮面内三阶模态频率也是导致传动链振动的频率,在实际控制中同样希望对这一频率附近的振动源进行加阻尼,设计滤波器过程同上。由坎贝尔图可知,选择最大幅值频率为9.36rad/s,Q为3.72。则带通滤波器2可表示为:
(19)
3减振控制验证
依据以上设计数据,利用动态链接库编写可以与bladed软件接口的控制dll,导入bladed软件进行仿真测试,加阻前后的转矩比较如图3所示,传动链的振动明显减小。图4为加阻前后的功率输出比较,由图4知,加阻没有给发电量带来过大影响。
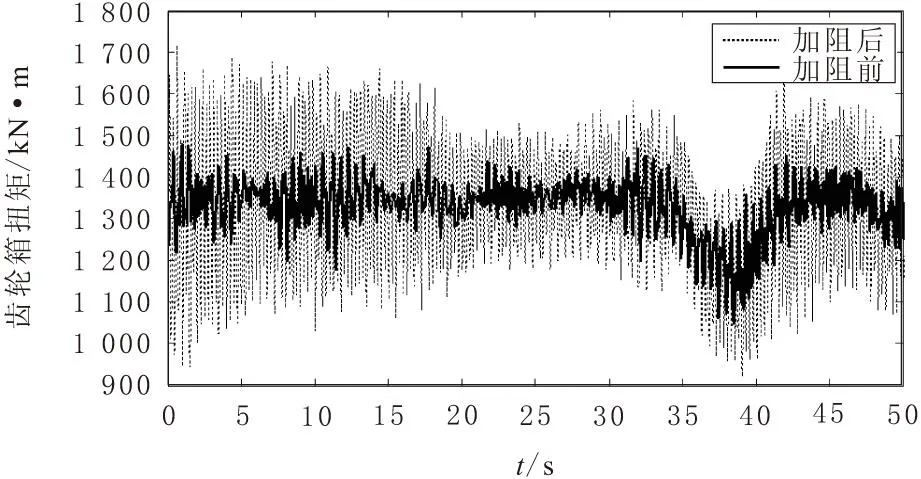
图3 齿轮箱扭矩对比

图4 功率输出对比
为测试算法在实际风场的控制效果,在风场中利用录波工具采集算法施加前后电机转速除变比后与风轮转速的差值进行比较。以0.5h为一对样本长度,分别采集平均风速为5~15m/s的数据样本10对,数据处理过程为,原始数据经3s平均之后,与原始数据做标准差。经比较,算法运用后电机转矩标准差输出减小接近7%。
4结束语
推导了风机传动链传递气动扭矩的动态过程,并建立了传动链状态空间方程。在状态方程的基础上,研究了加阻控制对传动链振动减缓的定量分析过程。
基于整机模态振动特点,分析并设计了传动链加阻带通滤波器。利用现有风机数据,以实际例子计算了控制器控制参数,并分析其控制性能。
利用bladed软件仿真验证了理论分析的正确性,并通过现场数据分析进一步证明其正确性。仿真及现场数据分析表明,本控制策略能够有效控制传动链振动。
参考文献:
陶学军,卢晓光.基于控制方法的风机塔架减振研究[J].机电工程,2014,31(3):325-329.
王大为,陶学军,卢晓光. 基于柔性叶片模型的独立变桨减载控制. 电力系统保护与控制,2012,40(16):111-115.
金鑫,钟翔,谢双义,等.大型风力发电机转矩LQR控制及载荷优化.电力系统保护与控制,2013,41(6):93-98.
秦大同,龙威,杨军,周海波.变风速运行控制下风电传动系统的动态特性.机械工程学报,2012,48(7):1-8.
张慧玲,郝思鹏,袁越,等.基于实测数据的双馈风电机组外特性研究及简化建模.电力系统保护与控制,2013,41(17):82-87.
戴巨川,胡燕平,刘德顺,等.MW级变桨距风电机组叶片转矩计算与特性分析. 太阳能学报,2010,31(8): 1030-1036
刘萍萍.风力发电机组柔性减振控制.哈尔滨:哈尔滨工业大学,2012.
