繁华商业区地下立体车库车辆堆垛测控实现
2016-01-19孙洪宇王丽杰袁业刚丁欣
孙洪宇++王丽杰++袁业刚++丁欣


摘要:给出面向繁华商业区地段的新型巷道堆垛式地下立体车库实现方案,探讨巷道堆垛式立体车库堆垛机测控方法,研究车库出入库车辆寻址定位方法,基于STC89C52单片机实现了堆垛小车测控定位及光电寻址.给出巷道堆垛式立体车库存取策略,采用叉梳式车辆存取方式实现车辆搬运,完成车库搬运机构结构设计并采用计算机辅助制图软件SolidWorks绘制相应结构图,该研究成果对于实现繁华商业街快速停车、解决商业区停车难问题具有重要现实意义.
关键词:商业区;立体车库;巷道堆垛式;堆垛机;寻址定位
DOI:10.15938/j.jhust.2015.05.017
中图分类号:TP273
文献标志码:A
文章编号:1007-2683(2015)05-0085-06
0 引言
随着社会经济的不断飞速发展,私家车数量日趋增长.机动车保有量的增长与泊车位的紧缺之间的矛盾日益凸显.针对传统车库车位少、费朋高、空间利用率低等弊端,十二五期间,国家大力倡导建设现代化的立体停车库,与之配套使用的立体车库测控技术则成为该领域中科研人员急需提升及发展的重中之重.目前,国内关于立体车库与立体车库测控系统的研究尚处于起步阶段,行业内没有统一的技术标准,多数产品靠引进或效仿国外技术制造,技术水平低、价格高昂.同时,由于缺少科研设计单位等的参与,立式停车测控技术研发能力严重不足,再加上政策不配套,造成了停车产业发展和管理的严重滞后.
上述问题的解决一方面需要国家给出政策,如尽快建立立体车库行业运行机制,运用价格杠杆调高占路停车收费标准、消除路边停车现象,鼓励按市场规则经营车库等,另一方面则需要鼓励高校、科研单位大力开展立式车库测控技术自主研发,研究适合国情的且具有本土化优势的立体车库测控系统,解决立体车库智能收费、车辆存取识别、车位调度及行程设计、堆垛定位及测速、智能安防报警以及车辆超限超重检测报警等系列关键技术问题.
本文研究适用于繁华商业区地段的新型巷道堆垛式地下立体车库测控系统,研究解决立式停车堆垛机堆垛寻址定位、行程控制、车辆存取策略等关键技术问题.课题研究对于实现解决立式车库车辆自动堆垛具有重要意义.
1 方案与方法研究
考虑到大型城市繁华商业区地段,车辆流动量大、可用空间有限、人员拥挤等特点,研究中选择巷道堆垛式立体车库结构型式,繁华商业区地下立体车库研究主要围绕车辆存取方法、入库引导测控和堆垛机寻址定位测控三部分内容展开.图1给出车辆存车入库堆垛控制方法流程图.
1.1 方案设计
结合图1所示存车流程说明车库设计总体方案.巷道堆垛式立体车库的测控主要通过入库引导和堆垛机测控来实现,堆垛机部分主要由提升搬移机构和堆垛机小车测控机构组成.
GB17907-1999《机械式停车设备通用安全要求》中,明确规定了立体车库停车位的长、宽、高等信息.所以,研究中,在车库入口处设置入库引导系统完成对入库车辆进行长宽高三维尺寸和车重等检测以及超限报警,以确定车辆是否符合该车库车辆入库要求.车辆入库后,通过入库引导提示系统,提示司机将车停放到规定位置,司机下车,司机离开车库后,库门关闭,主控单片机系统启动管理系统,根据车库车位实时监测结果给出空闲车位信息,根据调度最优策略计算确定停车泊位具体位置,并将控制信息通过无线通讯方式传输入堆垛机小车单片机控制系统,开启具体车位的寻址定位操作,
堆垛机小车单片机控制系统控制小车光电寻址,移动到规定的泊车位后,泊车位下方的堆垛机小车测控机构控制提升搬移机构中的移动叉梳板抬起车辆,同时堆垛机提升系统工作,使堆垛机小车垂直运动,待提升系统稳定后堆垛机水平移动.这样就实现了车辆的升降平移的运动,完成车辆入库寻址,堆垛机小车进入空泊车位时,泊车位处光电测位开关监控车辆停放泊车位是否超限,如果过位启动光电报警,泊车位单片机控制子系统控制停车中断并传输信息至小车控制单片机系统及主控单片机系统,控制堆垛机小车进行相应调整处理.如果具体车位停车到位,则堆垛机小车控制放下移动叉梳板,把车辆移动到泊车位的固定叉梳板上,完成车辆的存入,
取车过程与存车过程相反.车库框架的具体层数和每层容纳泊车位数量由相应建筑结构具体设定.
1.2 车辆存取策略研究
巷道堆垛式立体车库存取车辆可通过3种方式来实现:
1)原地待命策略.堆垛机完成存取操作后停在原地等待下次操作.
2)存车优先策略.当堆垛机完成存取操作后回到车库入口待命.
3)交叉存取策略.同时有几辆车需要存取时,对存取车辆进行存车和取车分组,对两组服务对象进行存取车交叉服务.
对于繁华商业区地下立体车库而言,存取车辆的时间长短直接反映了设备的利用率和效率.车库系统的存取车辆服务时间与车库中的位置有关,与车库出入口近的车位服务时间较短,反之时间则较久.因此研究中选择先近后远,先低层后高层的车辆存取方案,考虑到车库成本、繁华商业区拥堵实际情况等,最终确定存车优先的存取策略.
2 结构设计
2.1 结构型式选择
研究中,针对繁华商业区地段特点,选择地下巷道堆垛式结构型式架构车库,车库为三层,列数根据具体车库空间而定,整体而言,具备下述特色优势:①成本低、结构设计灵活.②具体实现安装时,既可以采用钢结构,也可以采用钢和混凝土的混合结构.③巷道堆垛机的存取方式易于实现自动化、智能化管理,系统灵活,安全性高.④适合解决繁华商业区地段车库入口处空间及面积等有限、寸土寸金等关键问题,提高地下土地面积利用率.
2.2 存取方式设置
立体车库存取车方式通常包括:三级滑叉式、链条传动式和叉梳式,三级滑叉式和链条传动式存取车方式中,每个停车位都有一个放置车辆的载车板,车辆的存取,实际上是通过对载车板的存取来实现的.每个车位都有一个载车板,因此,当连续存车或连续取车时,将会存在一个取空载车板或者存空载车板的空行程,这样就增加了存取车的时间,影响了存取车效率,考虑到存取车时间是一个影响立体车库使用的重要因素,而移动叉梳和搬运机构的连接系统结构简单,传动部件少,运行效率高,所以研究中选择叉梳式车辆存取方式.
移动叉梳结构设计如图2所示.
图2中移动叉梳长度为6000mm,前后轮支撑(叉齿)长度为550mm.堆垛机小车上设置移动叉梳,而每个泊车位上设置与之相互交错的固定叉梳.堆垛机小车到达指定位置后,通过堆垛机小车上的液压缸移动叉梳的升、降运动,实现汽车的存取,研究中采用计算机辅助制图软件SolidWorks绘制实现相应结构.
2.3 泊车位与固定叉梳
根据GB17907-1999《机械式停车设备通用安全要求》规定,研究确定车库所能容纳车辆最大参数:车长5000mm,车宽1900mm,车高l600mm,车辆轴距3000mm,车重2000kg.由此设计泊车位规格如下:库长7000mm,库宽2500mm,库高1800mm.泊车位与固定叉梳结构设计如图3所示.
为了实现前述车辆存取方案,车库结构设计时泊车位采用对称设计,中间留有堆垛小车行走的空间并且下方焊有小车行走轨道,方便堆垛机小车的行走,泊车位上方的固定又梳与上文介绍的移动又梳齿以相互交错的方式进行齿条啮合.
2.4 堆垛机小车结构设计
堆垛机小车由移动叉梳、液压缸、堆垛机行走小车组成,如图4所示.
堆垛机小车采用了对称结构,移动叉梳板由4个液压缸控制其升降,存车时,移动叉梳板升到最高位置,同时堆垛机小车沿着轨道进入泊车位下方,其叉齿与固定叉梳板上的叉齿错开,液压缸驱动移动叉梳板下降,使车辆从移动叉梳板向固定又梳板上转移,驱动堆垛机小车向堆垛机移动,完成存车过程,取车时各系统的运作与存车相反.
2.5 提升搬移机构
提升搬移机构采用框架结构,主要包括行车轮、拖车盘和钢筋框架.拖车盘的升降由链传动完成,提升链提升拖车盘的四角作垂直运动,由电动机提供动力,经减速器减速后,传动到驱动轮,驱动轮带动提升链使提升系统的拖车盘上下移动,实现运送车辆的目的,存车时,提升机沿巷道水平移动,拖车板垂直移动共同完成对准泊车位的运动,堆垛机小车沿着轨道进入泊车位,从而完成存取车的三维运动.
3 堆垛机测控系统设计
车辆存取寻址定位研究中,设计堆垛机水平移动与垂直移动测量定位方式相同.
小车水平定位由红外检测模块、单片机控制系统、电源模块、电机驱动模块、红外遥控模块组成,其组成框图如图5所示.
小车水平定位过程中:
1)首先把车库墙体涂成白色,再在每个泊车位的中间涂上宽为200mm的黑线.
2)车辆进入堆垛机司机下车后,通过红外发射器发送给单片机一个数字(即为车辆水平方向将要停泊的库位号,默认堆垛机起始由最左端0号泊车位,号数从左到右依次递增).
3)小车每经过一次黑线,红外线就会返回给单片机一次中断,当中断次数与红外发射器所给数字相同时,即为所要存取的泊车位,从而完成定位寻址.
3.1 堆垛机小车单片机控制系统
目前控制系统中主要运用的控制单元为单片机和PLC两种.单片机具有结构简单、使用方便、价格便宜等优点.所以堆垛机小车控制系统采用STC89C52单片机作为核心控制单元.
STC89C52是STC公司生产的一种低功耗、高性能CMOS8位微控制器,具有8k的系统可编程Flash存储器,运算速度快等优点,堆垛机小车单片机控制系统主要包括单片机控制芯片、电源电路、复位电路、时钟电路等,控制系统原理图见图6.
3.2 红外检测模块
采用反射式光电开关LTH1550作为传感信息采集装置,其测试电路设计如图7所示,
红外发射管发射光线到墙面,红外光遇到白底就会发生漫反射,接收管接收到发射光,经施密特触发器整形后输出低电平;当红外线遇到黑色线时就会被吸收,接收管没有接收到反射光,经施密特触发器整形后输出高电平,同时反馈给单片机一个中断信号.
3.3 红外遥控模块
发射部分与接收部分构成了利用红外线原理的遥控模块.由红外遥控器上的红外发射电路发射红外信号,单片机通过中断来对红外接收头接收到的载波信号进行解码来确定是哪个按键被按下.
红外遥控器采用芯片NEC μPD6121实现,使用NEC码型.NEC协议根据脉冲时间长短解码.每个脉冲为560μs长的38kHz载波(约21个载波周期).逻辑“1”脉冲时间为2.25ms,逻辑“0”脉冲时间为1.125ms.单片机通过计算相邻两个中断的间隔时间来判断信息位是“0”或“1”.如果单片机计算出的两次信息位的时间差值是1.125 ms说明接收到的为“0”,如果计算的两次时间差值是2.25ms则为“I”,信号码定义如图8.
协议的一帧编码由一段引导码,8位用于区分用户的不同类型的遥控装置的用户码和用于遥控器面板上的不同按键区分的8位数据码共同组成.并且完整两次发射,以提高应用的可靠性.如图9为NEC红外遥控器编码的结构图.
程序运行后,单片机首先要判断是否接收到脉冲,编码“0”和“1”拥有不同的脉冲时间,所以单片机一旦识别到脉冲信号,就利用计数器计算脉冲的长度,确定接收的是哪个编码.如果识别到的是头脉冲,单片机不做任何处理,每当识别到一个有效的信
号时,计数器的数值增加1,然后分析工作的完成情况,如果没完成,则直接结束程序,如果完成则进行下一步工作校验信号是否正确,如果校验错误,则直接结束程序,如果校验正确,则将键值进行保存并发送信息量,最后结束程序.图10是遥控解码程序的流程图,
为了提高运行可靠性,系统设计双重校验方法实现遥控方法.首先求出接收数据及其补码的和,若不为OxFF,则说明数据接收出现了错误,若为OxFF就说明接收了正确的数据.得到这个和之后,接下来使用这个用户码来滤除别的遥控器带来的干扰,从而确定了遥控器.这种双重校验的机制,有效的排除了外界的干扰,确保了接收编码的正确性.
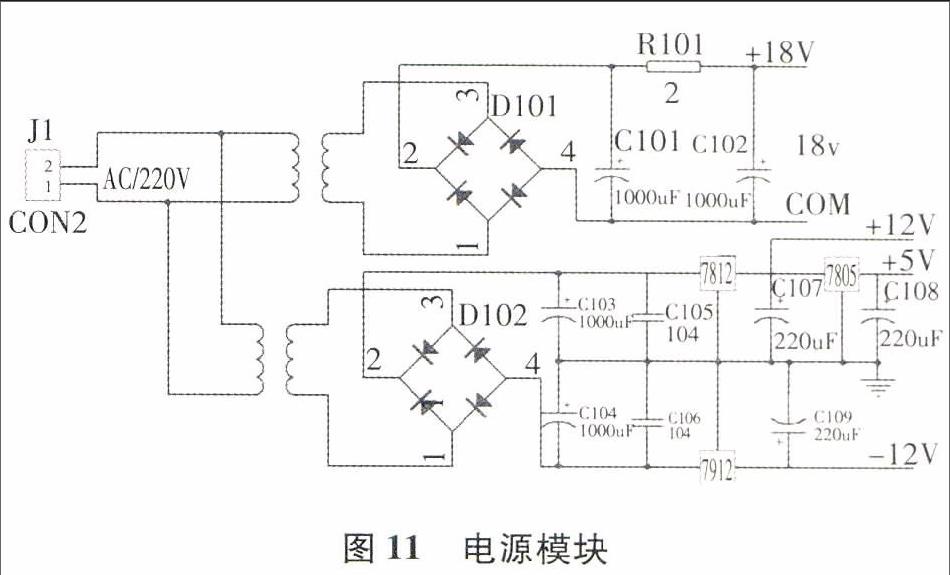
3.4 电源模块与电机驱动模块
研究中采用L7805、L7806、L7812芯片设计电源电路,原理图如图11所示.
图11电路输出分别为SV、6V和12V,系统运行时可为单片机、红外探测模块、电机驱动模块和步进电机供电,由于单片机输出的步进信号电压偏低,而且负载能力不足,不能用来直接驱动电机,L298N驱动芯片是性能优越的小型直流电机驱动芯片之一,在4~6V的电压下,可以提供2A的驱动电流,符合电机驱动的要求,因此需要使用驱动芯片L298N,单片机输出的信号,经过L298N实现功率的放大,驱动电机工作.
4 试验及结果
研究中设计小型模拟堆垛机测试样机,采用VC++编程实现相应测量控制环节.在模拟黑白线轨道中进行整体的测试.模拟堆垛机实体图如图12所示.
经过50次反复功能验证,模拟堆垛机小车完全能够实现预期的测控定位要求.并且定位误差小,可以满足设计要求.
5 结语
论文设计繁华商业区地下巷道堆垛式立体车库,给出其结构实现方案和存取车策略方法,完成堆垛机测控系统设计调试,并采用SolidWorks软件完成车库结构设计及零件图、装配图绘制,论文研究方案实用性强,充分利用有限空间,定位准确,容易实现.能够满足内地市场对立体车库的实用化低成本要求.
