快速SURF算法在药瓶塞缺陷检测中的应用
2016-01-181,,3,1
1,,3,1
(1.湖北文理学院机械与汽车工程学院,湖北 襄阳 441053;2.汽车零部件制造装备数字化湖北省
协同创新中心,湖北 襄阳 441053;3.东南大学电子科学与工程学院,江苏 南京 211189)
Application Research of Rapid SURF Algorithm on Medicine Bottle Lids Detection
WANG Zhongren1,WAN Renquan1,LU Chengyue2,ZHU Shizhang1
(1. School of Mechanical and Automotive Engineering,Hubei University of Arts and Science,Xiangyang 441053,China;
2. The Co-innovation Center of Hubei Province of Auto Parts Manufacture Equipment Digitizing,
Xiangyang 441053,China;3. School of Electronic Science & Engineering ,Southeast?University ,Nanjing 211189,China)
快速SURF算法在药瓶塞缺陷检测中的应用
万仁全1,王中任1,2,卢晨鉞3,朱世璋1
(1.湖北文理学院机械与汽车工程学院,湖北 襄阳 441053;2.汽车零部件制造装备数字化湖北省
协同创新中心,湖北 襄阳 441053;3.东南大学电子科学与工程学院,江苏 南京 211189)
ApplicationResearchofRapidSURFAlgorithmonMedicineBottleLidsDetection
WANGZhongren1,WAN Renquan1,LU Chengyue2,ZHU Shizhang1
(1.SchoolofMechanicalandAutomotiveEngineering,HubeiUniversityofArtsandScience,Xiangyang441053,China;
2.TheCo-innovationCenterofHubeiProvinceofAutoPartsManufactureEquipmentDigitizing,
Xiangyang441053,China;3.SchoolofElectronicScience&Engineering,Southeast?University,Nanjing211189,China)
摘要:针对目前的SURF算法占用内存大和耗时长等缺点,提出一种基于兴趣区域的快速SURF算法。首先对目标图像进行阈值化分割算法进行分割,消除和抑制了图像中背景的无用信息,再利用SURF对分割后的图像进行匹配运算。
关键词:SURF算法;阈值分割;图像匹配;实时性
中图分类号:TP391
文献标识码:A
文章编号:1001-2257(2015)03-0039-04
收稿日期:2015-01-04
基金项目:湖北文理学院大学生创新创业训练资助项目(201310519041)
Abstract:Since speed-up robust feature (SURF) algorithm is applied in the process of feature matching and problems of wide range of searching,large volumes of data and slowly running occur,a new matching method of SIFT based on region of interest is proposed. In order to improve the performance for speed of algorithm,the image is segmented by threshold value method which eliminates and suppresses useless information of image background. Then,SURF is used to extract feature points of segmented image and match elementarily.
作者简介:万仁全(1990-),男,湖北孝感人,硕士研究生,研究方向为机器视觉;王中任(1974-),男,湖北黄梅人,博士,副教授,研究方向为智能制造与机器视觉。

Keywords:speed-uprobustfeature;thresholding;imagematching;real-time
0引言
在医用药瓶盖生产中,加工出来的瓶盖难免有少量的不合格品,然而瓶盖的变形和破损等会使药品的密封性破坏遭到破坏,导致药品变质。这些不合格的药品流向市场后对患者的生命健康造成极大隐患,因此,对药品盖进行检测成为药品生产过程中必不可少的一个环节。在现代药品生产中,传统人工检测药品盖子方法己经不能适应生产自动化与产品标准化的要求。运用机器视觉检测方法可以大大提高药品盖生产效率和生产过程的自动化程度,能够很好地满足企业生产需求。 机器视觉利用一个代替人眼的图像传感器去获取物体图像,将图像转换成数字图像,并利用计算机视觉模拟人的判别准则去理解和识别图像,达到分析图像并做出判断的目的,具有速度高、信息量大和功能多等特点。在机器视觉检测药瓶盖的过程中,对药瓶盖的匹配定位精度和效率,直接影响了整个检测系统的检测效果和效率。针对药瓶盖的匹配定位要求和现状,提出一种基于感兴趣区域的SURF算法,实现了药瓶塞的快速定位,满足了机器视觉系统的高实时性要求。
1药瓶塞机器视觉检测系统
基于机器视觉的药瓶塞自动检测系统工作原理如图1所示。其工作过程为:药品塞被传送到检测位置,进料光电传感器触发,通过运动控制卡传到计算机,以获得药瓶塞到位信号。经过一定的延时后,指令检测位置上方摄像机启动拍摄药瓶塞图像。图像被采集传输计算机内存储。计算机中的图像处理系统对采集到的储液桶图像进行处理,通过一系列图像处理算法求取药瓶塞图像的外圆圆度误差值,若药瓶塞的外圆圆度误差值大于预设的阈值,则判断当前药瓶塞为不合格品,计算机通过运动控制卡的离散IO功能使踢料电磁阀开启,气动喷嘴将不合格品收集到指定容器,从而实现了药瓶塞外圆的自动检测。
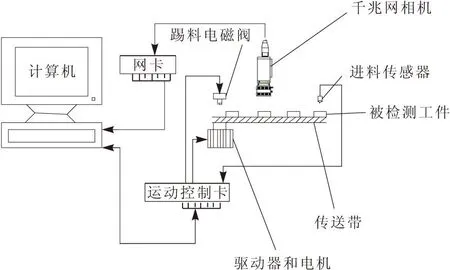
图1 基于机器视觉的药瓶塞自动检测系统
2SURF算法
图像匹配的目的是为2幅不同图像中的相似目标物建立对应关系,这是图像配准、三维重建、目标跟踪和自动定位等图像处理的基本步骤。而基于特征点的图像匹配因为其计算量小、鲁棒性强和匹配精度高等特点得到广泛的研究和应用。参考文献[2-3]用仿射不变性、噪声和明暗变化等衡量各种局部算子,得出SIFT是较其他局部特征算子性能上更加优秀,SIFT算法对图像的比例缩放、旋转以及噪声和光强的变化具有较好的不变性,因而广泛应用于图像识别、图像配准中[5]。但SIFT算法匹配维数过大,造成计算量大和匹配耗时长等缺点。2006年,HerbertBay根据对SIFT的改进提出的加速鲁棒特征SURF(speededuprobustfeatures)算法具有对图像平移、旋转、缩放和光照等保持不变性等特征,能精确描述目标结构和纹理,在图像配准领域得到广泛应用。参考文献的实验结果表明,SURF与SIFT相比具有相似的性能,但是计算复杂度大大降低,是较为理想的匹配算法。
SURF算法的思想与SIFT算法类似,不同的是SURF算法采用不同尺度的BoxFilters与原图片(积分图像)卷积获得尺度空间;在检测特征点时,SURF先利用Hessian矩阵确定候选特征点,然后进行非极大值抑制,获得不同尺度的特征点。SURF算法流程如图2所示。

图2 SURF算法流程
2.1 特征点的提取
SURF算法中特征点是指图像中具有独特位置的点,例如角点、拐点及T形连接。这些特征点一般具有易于提取、区分性强和稳定性好等特点。
特征点的提取第1步是建立积分图像,积分图像的每一点表示为原图像从原点到该点的矩形区域的像素值之和。建立积分图像后用箱式滤波器(boxtypeconvolutionfilters)形成尺度空间;采用Hessian矩阵检测极值点,同时进行非极大值抑制,选取比相邻的26个点的响应值都大的点为特征点,即可得到稳定的特征点位置和尺度。
2.2 特征点的描述
计算以特征点为中心,半径为6σ(σ为特征点所在的尺度值) 邻域内点的Harr小波响应来确定特征点主方向;将坐标轴旋转到特征点的主方向,然后以此点为中心,沿主方向上选择一个20σ× 20σ的正方形区域,并将其划分成4 × 4 的子区域,每个区域用Harr小波响应生成一个四维向量,建立64维的特征描述向量。
2.3 特征向量的匹配
在欧式空间中采用最小距离准则来完成特征向量集的匹配,针对特征点匹配得到的匹配点中存在误匹配问题,引入随机抽样一致性算法(RANSAC)算法对匹配点对进行筛选,将匹配质量较差的点作为外点去除,从而提高变换模型参数估计的准确性。SURF匹配效果如图3所示。

图3 SURF匹配效果
3基于感兴趣区域的快速SURF算法
虽然传统的SURF匹配算法有非常广泛的工程应用,但还是不能满足工业生产线上反应快、实时性强的物体识别及定位要求。在标准模板图像与待匹配的药瓶塞图像(如图4所示)可以发现,采集到的图像包含较多的背景信息,检测系统只是需要图像中间的感兴趣区域ROI(regionofinterest)进行匹配定位,这些背景信息不仅无益于目标药瓶塞的匹配定位,而且可能带入噪声,对匹配定位的速度和精度均有不利的影响。基于此,提出了一种基于兴趣区域的快速SURF图像匹配算法。首先运用阈值化分割算法对目标图像进行分割,再利用SURF对分割后的图像进行匹配运算,消除和抑制了图像中背景的无用信息,减少了检测系统的数据处理量,加快图像处理的速度。流程如图5所示。

图4 标准模板图像与待匹配的图像
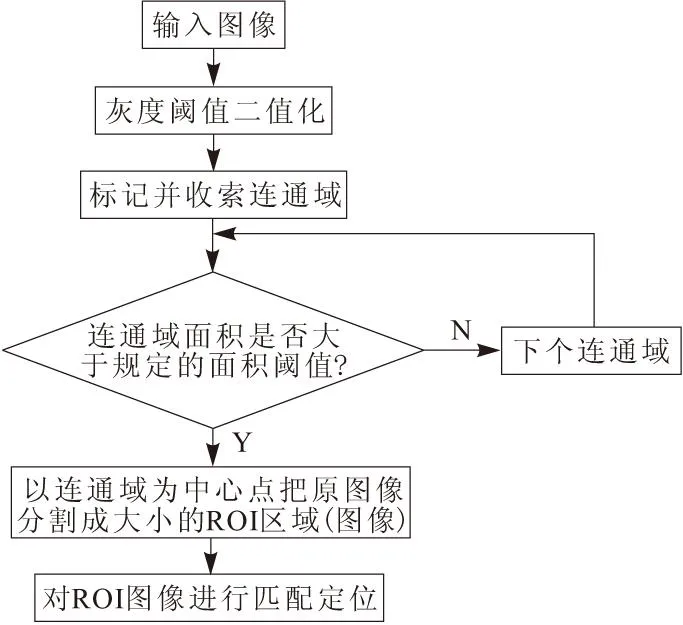
图5 基于ROI区域快速SURF算法流程
3.1 图像二值化
由图4 的图像和对应的灰度直方图可知,目标和背景占据不同的灰度级范围,可以用灰度级阈值法进行图像二值化,如式(1)所示。

(1)
f(x,y)为输入图像,g(x,y)二值化后的图像;T为灰度阈值。分析图像的灰度直方图后选取阈值T=60,证实这个阈值下图像分割效果较好。
3.2 ROI区域的筛选和分割
二值化后的图像会有噪声、背景的白色点等干扰,故二值化图像的白色区域不仅是ROI区域,同时也包含噪声和干扰点。想要提取的ROI区域的面积同其他干扰区域面积相差很大,可以利用面积阈值来筛选,步骤为:
a.连通分量的标记。如图6所示,A为原图像,Ai(i =1,2,3…)表示包含于集合(图像)A的连通分量(图6中框形区域),从连通分量Ai内部某个像素点P开始,不断采用8连通的结构元素S(如图7所示)进行膨胀,每次膨胀完后的图像与原始图像A正交,就可以把膨胀限制在Ai的内部,算法的数学表达为:

图6 原图像A
图7 8连通结构
如果Bk= Bk-1,则算法收敛,该连通区域提取完毕。提取完对该连通区域Ai进行标记,即将Ai内的像素都赋值i,同时i+1,对下一个连通分量Ai+1进行如上步骤进行标记。标记后的图像如图8所示。
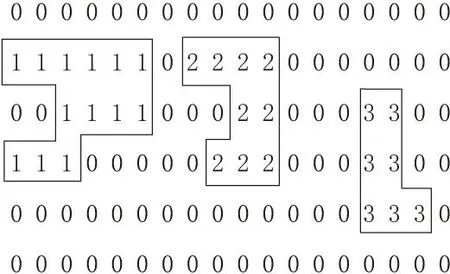
图8 标记后图像
b.ROI区域筛选与形心坐标计算。对上a步标记的连通区域的面积进行遍历检索,统计Ai的像素个数,即为Ai的面积值,记为Si,用面积阈值筛选ROI区域,如果Si大于预设的面积阈值Si,则判断为ROI区域。进一步可以用式(2)求得ROI区域的形心坐标,即剔除干扰点(如图9所示)后,并计算出ROI形心(XR,YR)=(344,248) ,如图10所示。
(2)

图9 未剔除干扰点 图10 ROI区域形心坐标
C.以(XR,YR)为中心,将原图像分割大小为MR×NR的ROI图像,留给后续匹配,如图11(b)所示:

图11 原始图像和ROI图像
4快速SURF在药瓶塞检测中的应用
实验所用的图像采集于德国Basler公司的CCD摄像机,型号为acA640-120gm,图像大小为659×494像素。算法性能测试实验中,测试平台硬件环境:CPU为PentiumP61002.00GHz,2GRAM;软件环境为VC2008。本文主要从工业中关心的匹配定位精度和时间两个方面对算法进行验证,匹配定位的效果如图12~图14所示。
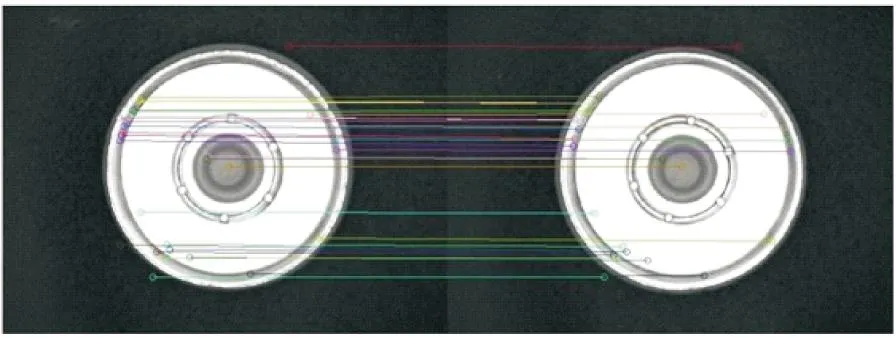
图12 SURF匹配结果

图13 基于ROI区域的SURF匹配结果
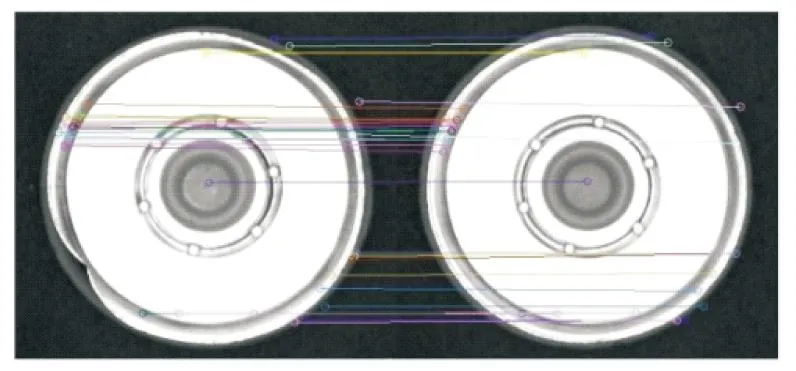
图14 严重变形的药瓶塞匹配结果
实验结果分析,图12和图13是相同的图像对之间的匹配,从图12~图13可以看出,改进后的SURF算法明显可以消除和抑制了图像中背景的无用信息,并且没有减弱匹配效果和精度。在图14中,左边的药瓶塞有明显的变形,仍可以保持较高的匹配精度,体现算法良好的鲁棒性。表1给出了改进前后匹配时间的比较,由表1可以看出,改进后算法比原始算法在匹配时间上减少25.6%。

表1 改进算法前后匹配时间比较
5结束语
针对工业生产线上对图像匹配定位的精度和实时性要求,将图像分割和SURF结合起来,输入图像后先对ROI区域进行提取,缩小了SURF算法的计算量。实验表明,改进后的算法没有影响匹配的精度和效果,并且对有明显变形的药瓶塞具有良好的鲁棒性,在实时性要求高的自动化检测线上具有一定的实用价值。
参考文献:
[1]贺柏根,朱明.改进的抗全仿射尺度不变特征变换图像匹配算法. 光学精密工程,2011,19(10):2472-2477.

[2]MikolajczykK,TuytelaarsT,SchmidC.Acomparisonofaffineregiondetectors.InternationalJournalofComputerVision,2005,65( 1) : 43-72.
[3]MikolajczykK,SchmidC.Aperformanceevaluationoflocaldescriptors.IEEETransonPatternAnalysisandMachineIntelligence,2005,27( 10) : 1615-1630.
[4]李婕,邓德祥,石文轩,等.一种抗视角变换的SURF匹配算法 .计算机应用研究,2012,29(9):3536-3539.
[5]纪华,吴元昊,孙宏海,等.结合全局信息的SIFT特征匹配算法[J].光学精密工程,2009,17( 2) : 439-444.
[6]BayH,TuvtellarsT,VanGL.SURF:speededuprobustfeature//Procofthe9thEuropeanConferenceonComputerVision.Berlin:Springer-Verlag,2006: 404-417.
[7]赵立荣,朱玮,曹永刚,等.改进的加速鲁棒特征算法在特征匹配中的应用 .光学精密工程,2013,21(12):3263-3271.
[8]LuoJ,GwunO.AcomparisonofSIFT,PCA-SIFTandSURF.InternationalJournalofImageProcessing(IJIP),2009,3(4):143-152.
[9]翟优,曾峦,熊伟.不同局部邻域划分加速鲁棒特征描述符的性能分析. 光学精密工程,2013,21(9):2395-2404.