一种车载稳定平台系统设计
2016-01-18,,
,,
(中国电子科技集团公司第三十八研究所,安徽 合肥 230088)
System Design of a Vehicle-borne Stabilized Platform
CHEN Meifang,WANG Hu,XU Feijun
(NO.38 Research Institute of CETC, Hefei 230088, China)
一种车载稳定平台系统设计
陈美芳,王虎,徐非骏
(中国电子科技集团公司第三十八研究所,安徽 合肥 230088)
System Design of a Vehicle-borne Stabilized Platform
CHEN Meifang,WANG Hu,XU Feijun
(NO.38 Research Institute of CETC, Hefei 230088, China)
摘要:研究一种二维车载稳定平台,与常规的平台不同,采用了同步带传动结构、多星切换技术和TUNER调整技术等。通过对平台的结构设计和控制方法的研究,找到了一种体积小、成本低、可靠性高和维护简单等特点的车载平台稳定系统,可为车载稳定平台系统设计提供宝贵的理论和实践基础。
关键词:车载式;稳定平台;伺服控制系统
中图分类号:TH112.1
文献标识码:A
文章编号:1001-2257(2015)03-0014-03
收稿日期:2014-11-04
基金项目:国家科技支撑计划资助项目(2011BAH24B05)
Abstract:A two-dimensional vehicle-borne stabilized platform is introduced in this paper. Different from the conventional design,it uses synchronous belt structure,multi satellite switching technology and tuner adjustment technology. Based on the introduction of structure design and control methods,vehicle-borne stabilized Platform which had the characteristics of small volume,low cost,high reliability,and simple maintenance is founded. It can provide valuable theoretical and practical basis for the design of vehicle-borne stabilized platform.
作者简介:陈美芳(1981-),女,安徽淮北人,工程师,主要从事雷达系统机械传动方面的研制工作。

Key words:vehicle-mounted; stabilized platform; servo control system
0引言
无论是在民用还是在军用中,车载稳定平台的研发越来越迅速,也越来越迫切,比如在交通管制侦测技术以及民用检测上,雷达车的稳定平台、以及装甲车坦克上的瞄准平台,一系列的需求促使了车载稳定平台的迅猛发展。也使得车载平台的应用越来越广泛,要求也越来越高[1-3]。
车载稳定平台承载着某跟踪测量设备,是跟踪系统基准中关键的部件之一,其结构和控制方法直接影响着系统的性能。
1系统组成
系统主要由稳定平台及伺服控制板组成,如图1所示。

图1 系统组成
稳定平台主要由方位轴驱动电机,俯仰轴驱动电机,方位轴驱动机构,俯仰轴驱动机构,安装底座以及保护开关,同轴铰链构成。
伺服控制的功能是控制系统的运动跟踪,主要功能是按照ACU的指令选择相应的卫星去跟踪,跟踪上卫星后锁定卫星,保证在车辆运动过程中也能对准卫星,连续的接收卫星信号,如特殊情况卫星丢失(比如车辆进入山洞遮挡)后能够快速追踪卫星并且恢复锁定,并且将伺服状态传送给ACU显示。
2稳定平台结构设计
稳定平台结构如图2所示。稳定平台天线罩底端有安装法兰,用于将卫星电视接收机固定在车顶,防止移位,晃动,通过方位驱动机构实现天线方位全向转动;俯仰驱动机构的两端支座固定在底盘上。俯仰前端与俯仰后端对称安装,底盘上安装元器件时,一方面要考虑走线的方便,另一方面通过合理的布置,使得整个稳定平台的重心在方位的回转轴上,同时尽量靠近回转中心,以便减小转动惯量。
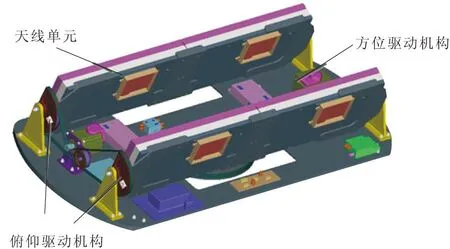
图2 稳定平台结构
2.1 天线单元
系统已选择相控阵平板天线作为接收天线。天线单元由两块双极化天线,固定板,以及高频头组成,2块双极化天线肩并肩安装在固定支架上,每块天线的背面留有接口安装高频头。天线单元结构组成如图3所示。
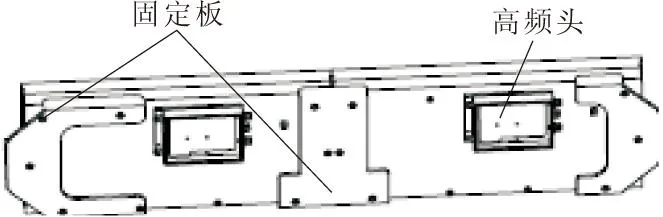
图3 天线单元结构组成
2.2 俯仰驱动单元
如图4所示,俯仰驱动机构主要由俯仰驱动端和俯仰从动端组成,驱动端通过带轮实现从动端的同步俯仰运动。
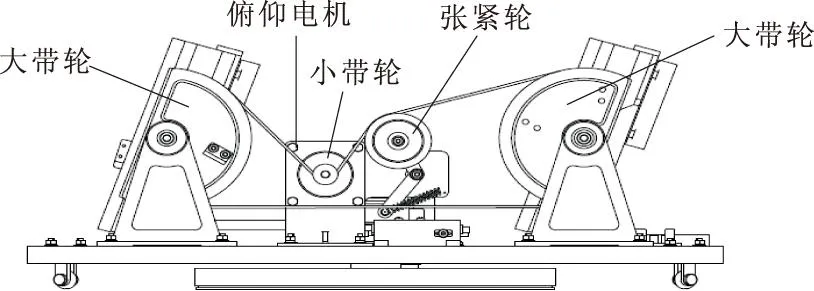
图4 俯仰驱动单元
驱动方式采用“电机+同步带”的方式,其综合了带传动、链传动和齿轮传动各自的优点。转动时,通过带齿与轮的齿槽相啮合来传递动力。同步带传动具有准确的传动比,无滑差,可获得恒定的速比,传动平稳,能吸振,噪音小,传动比范围大,传递功率从几瓦到几百千瓦。传动效率高,一般可达98%,不需润滑,无污染,完全满足技术要求。
2.3 方位驱动单元
方位驱动机构主要由方位轴系、方位驱动端和底盘等组成。
方位轴系采用常规的传动方式,由轴承座、方位轴和轴承等主要零件组成[4],方位带轮与方位轴固连,轴内走线,外部设备通过同轴铰链传输信号及供电.方位驱动同样也采用同步带传动,方位带轮固定在天线罩底部,方位电机安装在底盘上,与稳定平台一起转动。方位驱单元如图5所示。
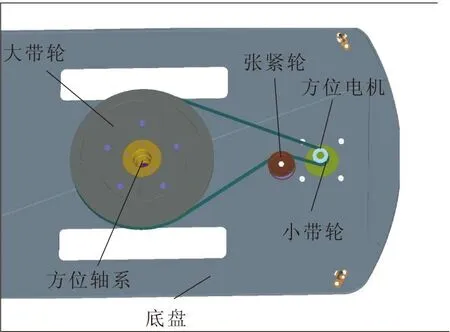
图5 方位驱动单元
3伺服控制
伺服控制,主要作用是在运动中搜索需要跟踪的卫星并且锁定卫星,在车辆的运动中实时的锁定卫星,确保接收卫星信号的连续性,在遇到遮挡或者特殊情况后卫星丢失能够快速找回要跟踪的卫星;伺服控制器还可以根据下端的ACU控制器发来的卫星选择命令跟换需要跟踪的卫星以及根据各个频道要求跟换天线的极化角;并且还将当前的跟踪状态将当前的跟踪状态等信息下传给ACU进行显示。
伺服控制方法采用速度、信号双闭环控制方法,速度闭环的检测器件是压电陀螺,检测转轴的转动速度,与输入给定比较,得到速度闭环,闭环控制方法为PI控制,大闭环采用信号闭环,由TUNER采集中频信号,将采集的中频信号和设定的信号特征进行对比和提取,提取的信号强度作为信号闭环的特征[5]。控制流程如图6所示。
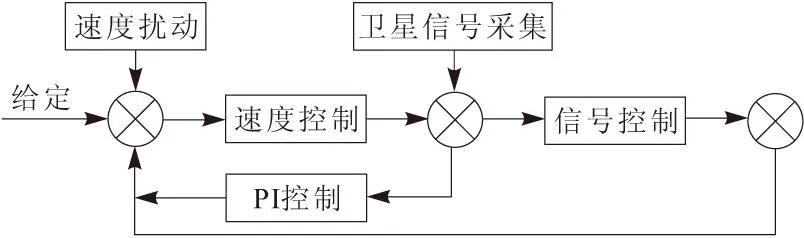
图6 伺服控制流程
4关键技术
4.1 同步带传动
同步带通过传动带动内表面上等距分布的横向齿和带轮上的相应齿槽的啮合来传递运动,具有带传动、链传动和齿轮传动的优点。同步带传动由于带与带轮是靠啮合传递运动和动力,故带与带轮之间无相对滑动,能保证准确的传动比,效率可达98%[4,6]。
俯仰和方位驱动都采用了同步带机构。由于传动带的材料不是完全的弹性体,因而同步带在工作一段时间后会发生塑性变形而伸长,这时,可通过调节张紧轮,以达到调节中心矩的目的,保持正常工作。其结构简单、可靠,同时便于装拆。
4.2 多星切换技术
根据ACU的选星指令和频道信号,通过TUNER快速调整卫星频点和极化位置,提供给用户多颗卫星选择。即多星可选,给用户提供更多选择;双路极化可选,试用不同客户需求。
4.3 TUNER调整技术
利用TUNER替换常规的声表滤波器提取AGC信号,可以选择不同卫星下行频率,为多星选择提供了技术保证。即可靠性高、造价低、受环境影响小和功能丰富。
5结束语
车载稳定平台是集结构和伺服控制于一体的复杂系统。它的功能是在移动车辆上接收卫星的信号,来确定位置信息。提出的稳定平台的结构设计和控制方法,具有体积小、成本低、智能化、可靠性高和维护简单等特点。通过对其研究,可进一步推动车载稳定平台技术的发展。
参考文献:
[1]王连明.机载光电平台的稳定与跟踪伺服控制技术研究.长春:中科院长春光机所,2002.
[2]于淼.车载平台系统的稳定研究.长春:长春理工大学,2008.
[3]张智永.移动载体稳定跟踪平台测控技术研究.长沙:国防科技大学,2001.
[4]吴凤高.天线座结构设计.西安:西北电讯工程学院出版社,1986.
[5]郭新胜.车载稳定平台伺服控制系统设计.南京:南京理工大学,2004.
[6]方文中.同步带传动-设计·制造·使用.上海:上海科学普及出版社,1993.