热泵系统中电子膨胀阀的模糊控制应用
2016-01-18潘绍飞
杨 帅,孟 文,徐 文,曾 利,潘绍飞
(西南交通大学 机械工程学院,成都 610031)
随着节能减排的理念日益深入人心,空气源热泵系统由于其节能性在人们的生活中得到日益广泛的应用。在热泵系统中,节流元件是核心部件之一,它对热泵循环中制冷剂流入蒸发器的流量起着调节作用,影响着整个热泵系统的性能。电子膨胀阀作为一种机电一体化节流元件,以其调节范围广、响应速度快、便于实现控制等特点逐渐在热泵热水器、家用空调、冷柜等设备中得到广泛应用[1]。
常用的电子膨胀阀的控制算法是PID控制算法,但需要建立在精确的数学模型基础上[2]。由于蒸发器过热度的影响因素是多样的,如系统负荷易受外界影响产生扰动[3]、环境温度和冷凝温度变化快且范围宽[4]、过热度对电子膨胀阀的动态响应具有一定的非线性和时滞性[5]等,这些因素导致蒸发器的数学模型难以精确地建立。热泵热水器电子膨胀阀的控制规律较于常规的制冷系统更为复杂,对电子膨胀阀的控制策略及算法提出了较高的要求。模糊控制器具有较佳的鲁棒性、适应性和强健性,适用于非线性、时变、滞后且模型不完全系统的控制[6]。因而,针对空气源热泵热水器的系统特点,本文阐述了一种基于特定控制策略的电子膨胀阀模糊控制器。
1 系统原理与实验平台
热泵技术基于逆卡诺循环原理,主要用于从低温热源中提取热量用于供热[8]。空气源热泵热水器系统主要由压缩机、冷凝器、储液干燥器、节流装置、蒸发器、水路调节阀、储水箱等组成。如图1所示,高温高压的气态制冷剂从压缩机出气口进入管壳式冷凝器,与冷水充分换热后,冷凝为低温液态。低温液态制冷剂经过储液罐时经缓冲、过滤后进入电子膨胀阀节流膨胀。节流后的制冷剂流经风冷式蒸发器吸热蒸发为气态制冷剂,经过气液分离器从压缩机进气口进入压缩机,完成制冷剂的循环过程。在此过程中,实现热水的制取和环境空气的降温。

图1 空气源热泵热水器工作原理Fig.1 Principle drawing of air-source heat pump water heater
所搭建实验平台中,压缩机采用的是活塞式3HP压缩机,频率50 Hz,制冷剂为R22,额定电压为AC 220 V。冷凝器采用的是管壳式换热器,蒸发器为翅片管式蒸发器。储水箱的容积为65 L,循环水泵的输出功率为200 W。节流元件为电动式电子膨胀阀,驱动电压为DC 12 V,驱动方式为四相八拍步进电机,其硬件驱动电路如图2所示。
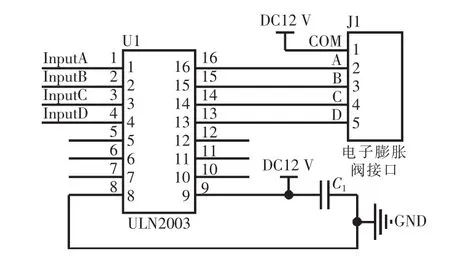
图2 电子膨胀阀驱动电路Fig.2 Schematic of EEV driving circuit
在热泵系统中,电子膨胀阀按照预设程序调节蒸发器的供液量。所选用电子膨胀阀驱动元件为大电流驱动晶体管集成芯片ULN2003。控制器的驱动脉冲信号通过ULN2003进行功率的放大进而驱动电子膨胀阀的四相八拍步进电机绕组,改变膨胀阀的开度,从而调节制冷剂的流量[7]。
2 模糊控制器设计及控制策略设定
基于设定过热度的电子膨胀阀开度调节模糊控制系统框图如图3所示。采用双输入单输出结构的二维模糊控制器。该模糊控制器的输入变量是蒸发器的过热度设定值和温度传感器检测到的实际过热度的偏差e和偏差的变化速度ec,输出变量是输出给电子膨胀阀的脉冲。当设定目标过热度后,模糊控制器通过温度传感器检测过热度偏差值和偏差变化速度值,推理出当下电子膨胀阀的动作方向和脉冲数。由控制器输出驱动脉冲通过驱动电路控制电子膨胀阀调节开度,进而使过热度动态地保持在目标过热度左右。
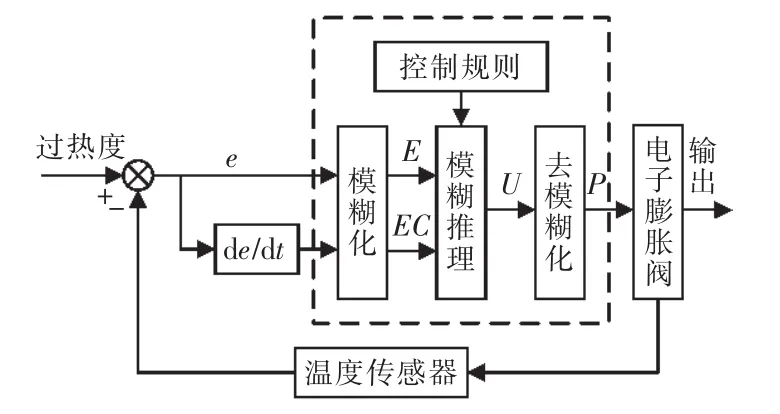
图3 过热度模糊控制系统Fig.3 Superheat fuzzy control algorithm
2.1 参数的模糊化
采用二维模糊逻辑控制器模式,即控制器具有2个输入变量过热度偏差e与过热度偏差变化速度ec,可较严格地反映受控过程中输出变量的动态特性[6]。根据经验确定过热度偏差e的基本论域为[-3,3],离散论域为 E={-3,-2,-1,0,1,2,3},量化因子Ke=1。过热度偏差变化速度ec的基本论域为[-0.6,0.6],离散论域为 EC={-3,-2,-1,0,1,2,3},量化因子Kec=5。电子膨胀阀的脉冲量输出变量u的基本论域为[-24,+24],离散论域为 U={-3,-2,-1,0,1,2,3},量化因子 Ku=0.125。
过热度偏差 e的语言变量为{NB,NM,NS,ZR,PS,PM,PB};过热度偏差变化速度ec的语言变量为{MF,MM,MS,ZE,AS,AM,AF};电子膨胀阀开度增量 u 的语言变量为{GB,GM,GS,ZR,KS,KM,KB}。为了提高对论域的覆盖度和灵敏度,并兼顾系统的稳定性和鲁棒性,各模糊子集的隶属度函数选择三角形隶属度函数及梯形隶属度函数,如图4、图5、图6所示。
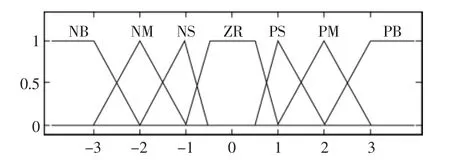
图4 过热度偏差e的隶属度函数Fig.4 Membership function of superheat error “e”
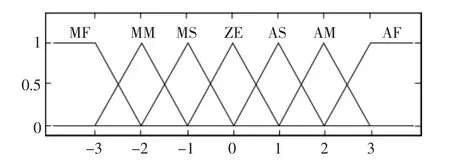
图5 偏差变化速度ec的隶属度函数Fig.5 Membership function of error changing speed “ec”
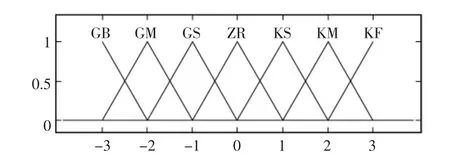
图6 电子膨胀阀开度增量u的隶属度函数Fig.6 Membership function of EEV opening increment“u”
过热度偏差e和过热度偏差变化速度ec分别乘以量化因子Ke和Kec,计算结果选取相近的整数y,将精确数转化为论域区间上的量。查看过热度偏差和过热度偏差变化速度的语言变量隶属函数,确定y上最大隶属度对应的语言值的模糊集合,把区间上的精确量用模糊量来表示,完成精确量的模糊化。
2.2 模糊控制规则表的制定
根据实验分析、归纳,确定模糊控制规则如表1所示。所设计的模糊控制算法中,过热度偏差语言变量子集数与温差变化速度语言变量模糊子集数均为7,因而共得到n2=72=49条模糊控制规则。

表1 模糊控制规则表Tab.1 Fuzzy control rule table
该模糊控制算法采用基于Mamdani推理的查询表法[9]。分别对过热度偏差语言变量和过热度偏差变化速度语言变量论域中的元素xi和yj模糊化,得到对应的模糊向量,经合成运算得到电子膨胀阀脉冲输出量语言变量的模糊向量,然后再采用加权平均法去模糊化得到电子膨胀阀开度增量语言变量论域的精确量uij,加权平均法数学表达式如式(1)所示。得到精确控制量后,以过热度偏差E的论域元素为列,过热度偏差变化速度EC论域元素为行,两论域元素相应的交点作为输出量,由此组成的(uij)7×7矩阵便是输出量模糊控制矩阵表中的精确量,由式(1)运算后得到。
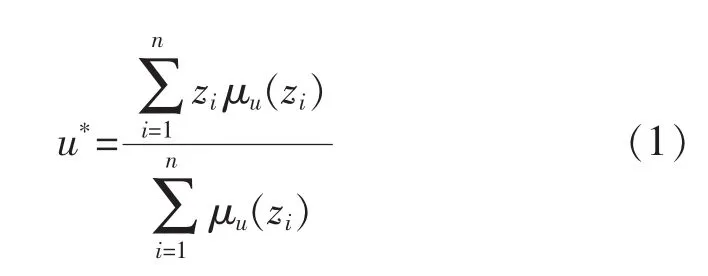
式中:zi为各对称隶属度函数的质心; μu(zi)为各对称隶属度函数的隶属度值;i=1,2,…,n,n=7。在控制过程中,MCU根据温度传感器的采样值得到实测过热度的偏差和偏差变化速度,再按照模糊控制规则进行模糊化处理得到对应的论域元素。为了降低处理器运算负荷以及提高程序运算速度,根据加权平均法去模糊化方法,制定模糊控制查询表,将其存储于单片机中。在控制过程中通过模糊控制查询表得到输出量,取整后输出为电子膨胀阀的脉冲量,从而调节电子膨胀阀开度实现对蒸发器过热度的控制。
2.3 控制策略的设定
根据蒸发器过热度响应特性,对于电子膨胀阀的控制策略设定为
1)在开机运行初始阶段,将电子膨胀阀的开度初始化为0。压缩机启动之前先将电子膨胀阀预先开启一定的起始开度,起始开度根据当前储水箱水温及环境温度进行设定。根据实验分析、归纳得出起始开度设定规则如表2所示。
2)待热泵循环稳定一段时间之后启用模糊控制器,每隔2 s进行一次过热度偏差e计算和过热度偏差值变化速度ec计算。将2个变量输入模糊控制器中,计算出当前应进行的电子膨胀阀动作方向及脉冲量。
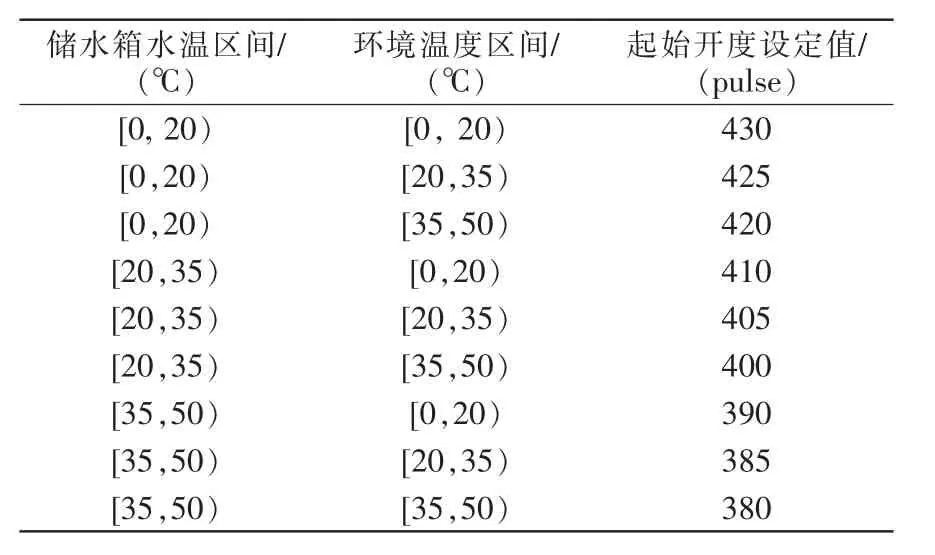
表2 电子膨胀阀起始开度的设定规则Tab.2 Rule of EEV initial opening setting
3)在压缩机运转的过程中,限定电子膨胀阀的开度调节区间为[100,475],当开度超出该区间时,控制器只发出使开度重回该区间的指令。
4)为节能和保护压缩机,当压缩机达到较高温度并持续超过20 s时,压缩机关停,开启待机模式。在压缩机停止运行时,电子膨胀阀迅速完全关闭、保持压力状态、避免工质迁移,以取得节能的效果。
3 实验结果及分析
将所设计模糊控制器应用在试验平台上,通过实验得出了模糊控制下的热泵热水器水温变化曲线、过热度偏差变化曲线、实验场所气温变化曲线、电子膨胀阀开度调整曲线,如图7所示。
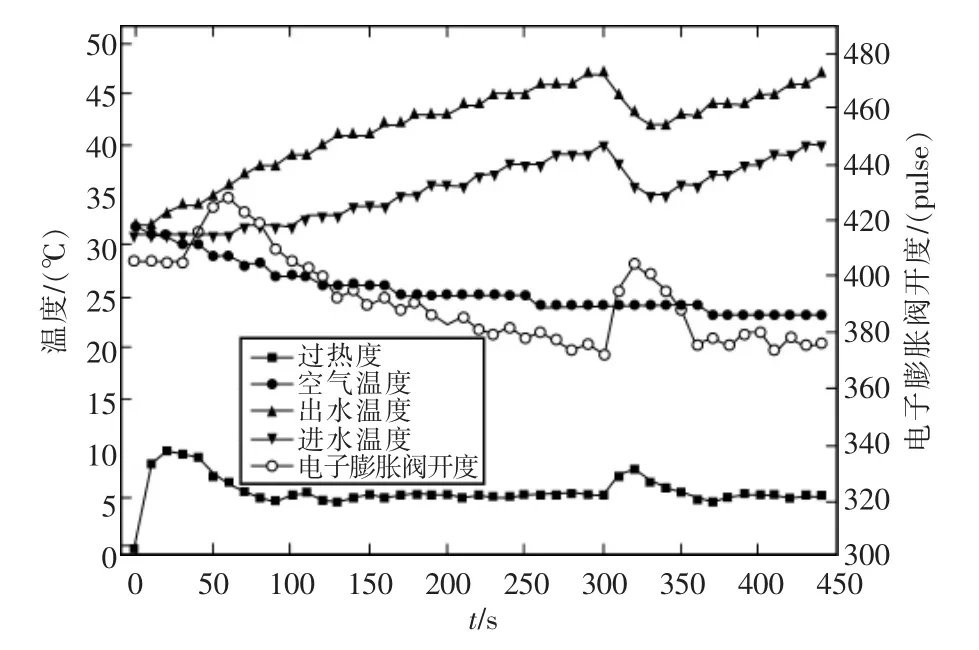
图7 过热度模糊控制曲线Fig.7 Superheat fuzzy control curve
在t=0~30 s时间段,系统处于启动阶段,电子膨胀阀保持起始开度,以等待制冷剂压力与过热度达到稳定状态。在此阶段,蒸发器过热度从0℃迅速升高至10℃左右,并逐渐稳定在这一水平。自t=30 s时刻开始,电子膨胀阀在控制器的指令下开始开度调节。设定电子膨胀阀调节的目标过热度为5℃。在t=30~90 s时间段内,过热度逐渐从9℃平缓地降至目标过热度。尽管之后的水温和环境温度不断变化,但过热度始终保持在目标过热度附近。在t=300 s时将水箱水量减少并充注冷水,以模拟用户使用热水所造成的冷凝温度波动,水箱水温降低,过热度略有不到3℃的上升,同时电子膨胀阀迅速地动作,增大开度使过热度的波动得到快速地平复并趋于平稳。
由实验结果可知,本文设计的模糊控制器既能使过热度快速地逼近设定值也能避免过度的超调和震荡,同时即使在系统水温和环境温度发生变化时,也可以保持过热度的稳定,从而保证系统的平稳高效运行。
4 结语
所设计模糊控制器结合控制策略应用于热泵系统试验平台上,可满足热泵系统高效稳定运行。在试验中模拟了因冷凝温度变化所造成的过热度波动,模拟控制器可以迅速地反应并将过热度波动限制在3℃以内的可接受范围,并且能够避免过度的超调,在短时间内将过热度平复,通过电子膨胀阀开度的微调及时地修正过热度的偏差,维持其平稳性。由此也可得知,具有鲁棒性、适应性和强健性的模糊控制器可以较好地应用于非线性、时滞、时变的热泵系统的电子膨胀阀控制,提升系统的稳定性和可靠性,保持适当的过热度并及时平复其波动,从而可有效提高系统能效。
[1]江明旒,吴静怡,孙鹏,等.电子膨胀阀在空气源热泵热水器中的控制方法研究[C]//中国制冷学会2009年学术年会,天津,2009.
[2]高正中,赵丽娜,刘隆吉,等.电子膨胀阀的双模糊控制器算法研究[J].自动化与仪表,2015,30(4):35-42.
[3]陈文勇,陈芝久,朱瑞琪,等.电子膨胀阀调节蒸发器过热度的控制算法[J].上海交通大学学报,2001,35(8):1228-1232.
[4]陈文勇,陈芝久,朱瑞琪,等.制冷系统启动过程电子膨胀阀的控制[J].上海交通大学学报,2002,36(2):210-213.
[5]宫赤坤,华泽钊.电子膨胀阀双神经元预测控制[J].上海理工大学学报,2002,24(3):230-232.
[6]诸静.模糊控制原理与应用[M].北京:机械工业出版社,2005.
[7]吴俊云,葛荣建,郭明珠,等.基于STC89S52单片机的电子膨胀阀的控制系统研制[J].制冷学报,2013,34(4):81-85.
[8]王志华,郑煜鑫,郝吉波,等.R134a空气源热泵热水器实验研究与性能分析[J].制冷学报,2014,35(3):71-76.
[9]王永富,柴天佑.自适应模糊控制理论的研究综述[J].控制工程,2006,13(3):193-198.
