基于北斗卫星系统的农田环境监测系统研究
2016-01-18于泓博李静辉陶佰睿
于泓博,李静辉,陶佰睿
(1.齐齐哈尔大学 通信与电子工程学院,齐齐哈尔 161006;2.齐齐哈尔大学 现代教育中心,齐齐哈尔161006)
近年来农业的发展也紧跟时代的脚步随之变迁,有机农业、智能农业的兴起极大程度地将互联网、物联网等新兴产业与农业相融合,为行业的发展注入了新的活力。农田的监测信息是分析的重要数据来源,其迅速、实时和连续采集是实现精细农业的基础。但是农业具有地域分散、对象多样、远离都市、通信条件落后、环境因子不确定和受环境影响明显等特点,这些都给农田环境信息的快速获取带来了困难[1]。本设计提出了基于北斗卫星系统的农田环境监测系统解决方案,选取针对农田环境的主要几种传感器,通过ZigBee模块进行无线组网,将数据汇总到ARM模块处理,并通过北斗导航模块进行定位从而实现数据的实时传输,其中ZigBee是一种非常适合农田实时监测的无线网通讯技术,而北斗导航系统作为我国拥有自主知识产权的全球卫星定位系统与ZigBee技术融合应用于农业环境监测上,具有一定的创新性,推动实现物联网+农业的发展,为智慧农业的实现起到一定的推动作用[2]。
1 北斗导航系统概述
北斗卫星导航系统是中国自行研制的全球卫星导航系统,继美国全球定位系统GPS、俄罗斯和欧盟卫星导航系统之后第四个成熟的卫星导航系统。北斗卫星导航系统空间段由5颗静止轨道卫星和30颗非静止轨道卫星组成[3]。2020年左右,建成覆盖全球的北斗卫星导航系统。其构成的卫星系统向全球用户提供高质量的定位、导航和授时服务,北斗卫星导航系统构成如图1所示。

图1 北斗卫星导航系统构成Fig.1 Beidou satellite navigation system
北斗卫星导航系统促进了卫星导航产业链形成,形成了完善的国家卫星导航应用产业支撑、推广和保障体系,推动了卫星导航在国民经济社会各行业的广泛应用。该系统可在全球范围内全天候、全天时为各类用户提供高精度、高可靠的定位、导航、授时服务并兼具短报文通信能力[4]。
2 系统硬件设计
2.1 系统总体设计方案
本系统主要包括PM2.5传感器模块、土壤湿度检测模块、空气温度检测模块、ZigBee终端节点和协调器节点、ARM主控模块、北斗定位模块和LCD显示模块,系统具体方案如图2所示。
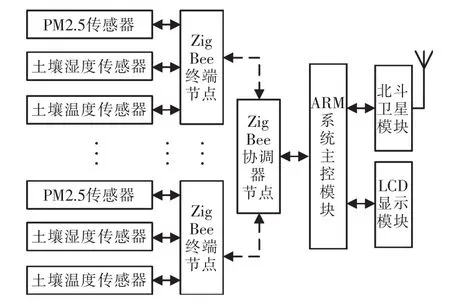
图2 系统方案框图Fig.2 System scheme block diagram
主控模块采用ARM7中STM32模块,该芯片属于32位的微控制器,主要负责对北斗模块和显示模块进行相关初始化,并接收和处理ZigBee协调节点发送来的数据信息,处理好的信息将在LCD屏中显示,同时北斗卫星模块将这些数据实时地发送至农田环境监控中心。由于ZigBee具有自动组网功能,所以系统采用多个ZigBee终端节点组成大规模监控网络,使监控范围增加,多个终端节点采集的数据最终汇聚到ZigBee协调器节点,协调器节点在整个网络中只有一个,负责ZigBee无线传感网的建立及维护[5]。同时接收各终端节点发来的数据,并通过串口转发给主控模块。终端节点负责采集所需的测量参数。每个节点都与PM2.5传感器模块、空气温度传感器模块和土壤湿度传感器相连接,实现对空气中的悬浮颗粒物浓度、空气的温度以及土壤湿度进行实时检测和传输。本系统采用UM220北斗芯片模块,完成地理坐标定位,得到所在点的经纬度,在主控模块的控制下,将定位信息和传感器采集农田环境参数发送至监控中心[6],同时这些信息将显示到LCD屏幕上。
2.2 北斗模块接口电路设计
本文采用基于双系统多频率的高性能SOC芯片和芯星通UM220-III N双系统高性能GNSS模块,能够同时支持BD2、B1、GPS L1两个频点。UM220是针对车辆监控、气象探测和电信电力授时等应用推出的BD2/GPS双系统模块,其工作电压为2~3.7 VDC,工作温度为-40~+85℃,定位精度为 2.5 m,是市场上尺寸最小的BD2/GPS模块,集成度高、功耗低,非常适合北斗系统大规模应用的需求。
作为相互通信需要,将北斗UM220的TXD2引脚连接嵌入式ARM 7模块STM32的PA10引脚发送数据,将北斗UM220的RXD2引脚连接嵌入式STM32的PA9引脚接收数据。UM220的接口电路设计如图3所示。
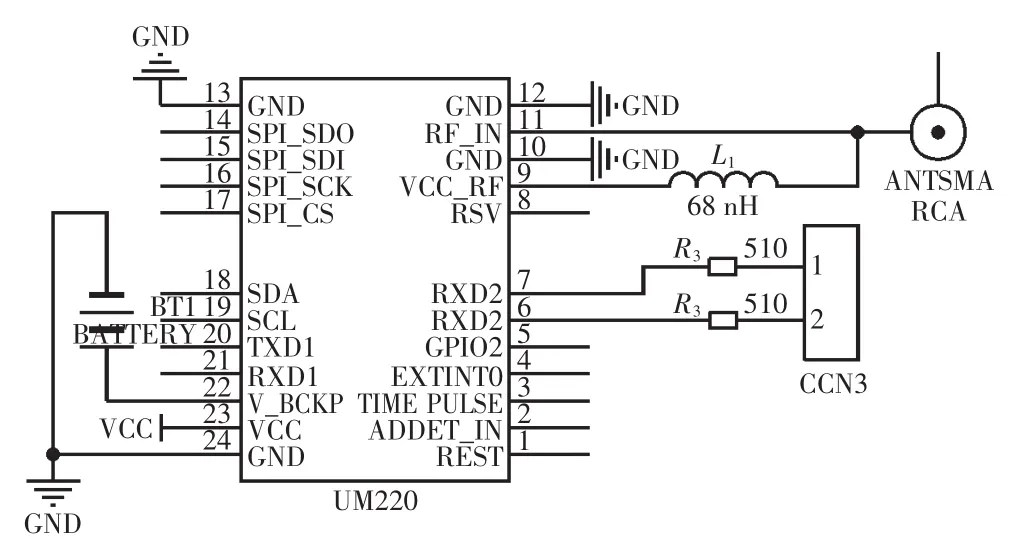
图3 UM220接口电路Fig.3 UM220 interface circuit diagram
2.3 LCD显示模块接口电路设计
采用ILI9326LCD显示屏,该模块与主控模块直接相连,主要负责动态显示来自主控模块的测量数据和定位信息,接口电路设计如图4所示,LCD的DB0到DB15引脚连接到STM32的D0到D15引脚,用于传输显示数据,LCD+和-用来调节显示屏背光灯的亮度。
2.4 ZigBee模块硬件接口设计
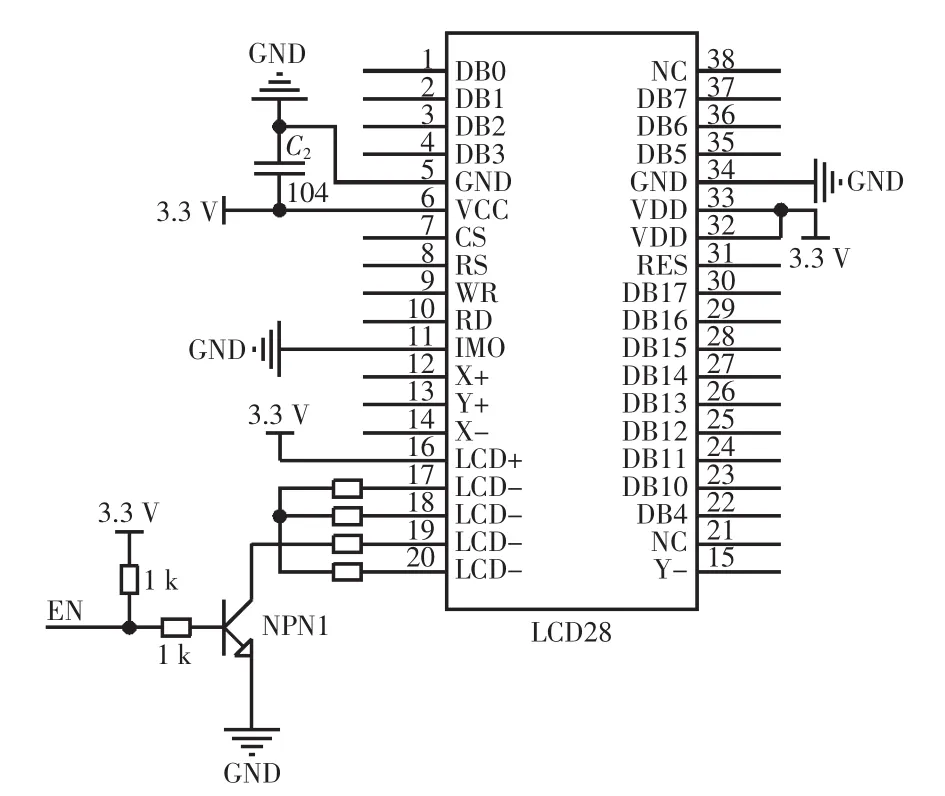
图4 LCD接口电路Fig.4 LCD interface circuit diagram
本设计中,CC2530终端节点作为测量终端,也是任务的真正执行者,除了具有基本的最小电路外,必须要同任务相关的DS18b20温度传感器、PM2.5空气质量传感器、YL-69土壤湿度传感器相连接,终端节点接口电路如图5所示,其中P05与YL-69的模拟输出AO相连接,P06与PM2.5传感器的模拟输出AO相连接,P07与DS18B20的数据输出DQ相连接。在本设计中均采用采集其模拟量的办法,并通过CC2530内部的ADC(数模转换)功能模块,进行采集量从模拟量到数字量的转换。DS18B20采用1-WIRE通信方式,其余CC2530仅通过DQ-P07连接。节点通过DQ根据协议发出不同的电平变化即可操作相关寄存器,进行初始化及读取测量值。
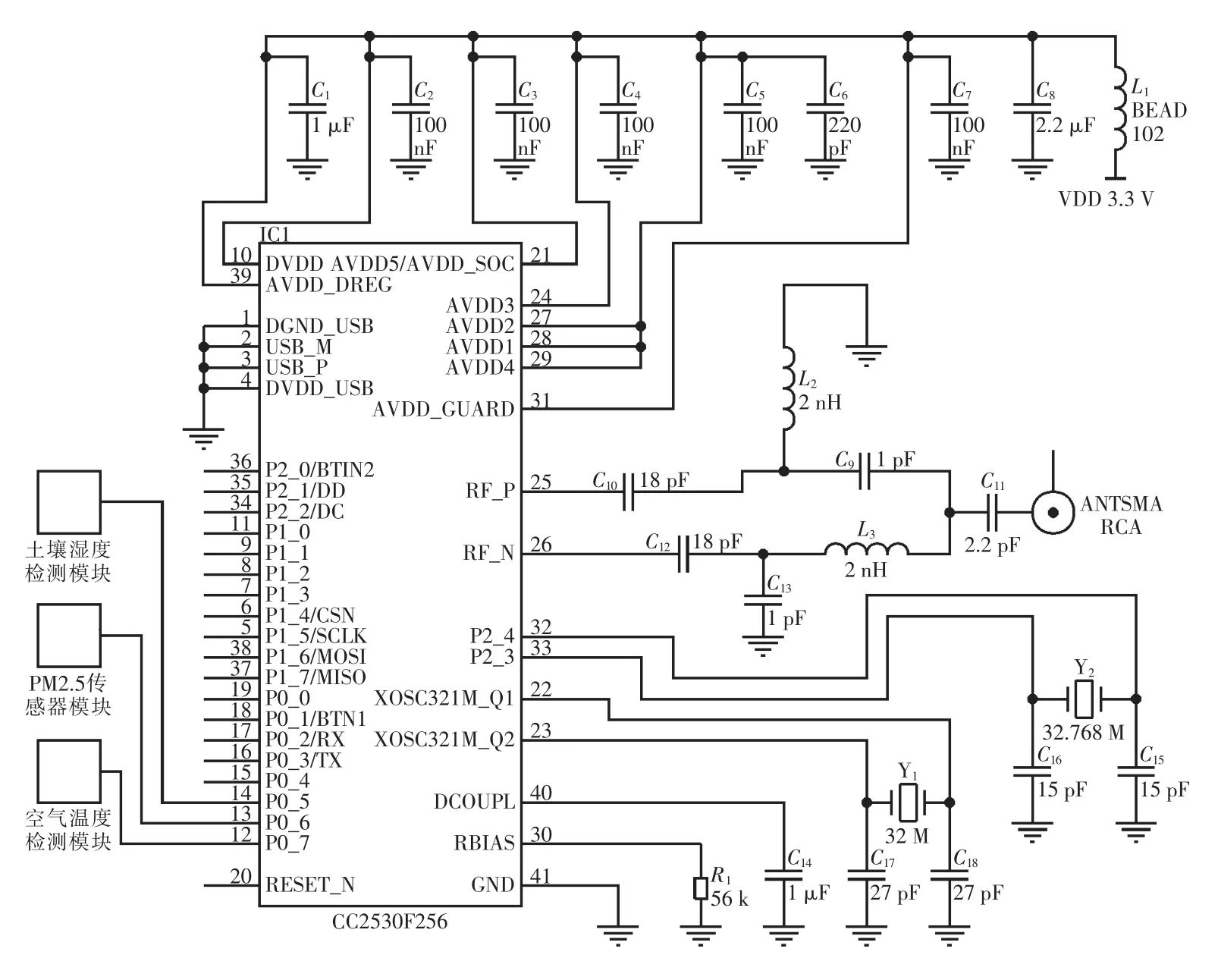
图5 终端节点模块电路Fig.5 Terminal node module circuit diagram
CC2530协调器节点因为其主要任务是建立和维护网络,并与ARM主控模块进行串口通信,所以协调器上并未安置其他传感器,本设计中选用其最小系统电路来作为CC2530协调器节点的基本电路设计。
2.5 湿度传感器YL-69接口电路设计
YL-69土壤湿度传感器可用于检测土壤的水分含量,接口电路如图6所示。当土壤水分含量低到预先设定的阈值时,传感器输出一个高电平,反之输出低电平。传感器的比较器采用LM393芯片,工作稳定,其工作电压为3.3 V~5 V,灵敏度可调。
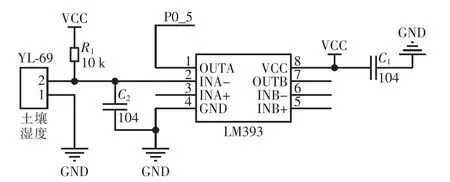
图6 湿度传感器YL-69电路Fig.6 Humidity sensor YL-69 circuit diagram
本文中YL-69的探头将探测到的数据传由LM393比较芯片进行电压的比较,将比较的结果通过OUT1引脚输出至ZigBee CC2530的P0引脚。
3 系统软件设计
3.1 系统的软件设计方案
系统的软件分为3大部分,分别是ZigBee、ARM和北斗。从上电开始,系统分别进入初始化,传感器节点将检测到的温度、湿度、可燃气体浓度和光照强度等数据发送至协调器节点,协调器节点将数据发送至ARM进行数据解析,同时,北斗也将其定位信息发送到ARM,ARM在解析数据后,将其显示在LCD屏幕上,系统的软件流程如图7所示。
3.2 路由与终端节点工作流程设计
由于系统外接模块较多,所以每个功能独立设计成子函数的形式,再由主程序依次调用每个子函数,从而实现不同的功能[7]。在编程语言上,本文采用适合将程序模块化的C语言来实现,这样不但可以提高编程速率,也方便了各个程序之间的调用和嵌套,使整个应用系统能更稳定地运行下去[8]。该系统中的核心部分就是路由与终端节点算法,此算法决定系统整个ZigBee网络通信的组成和信息的传输[9],算法流程如图8所示。
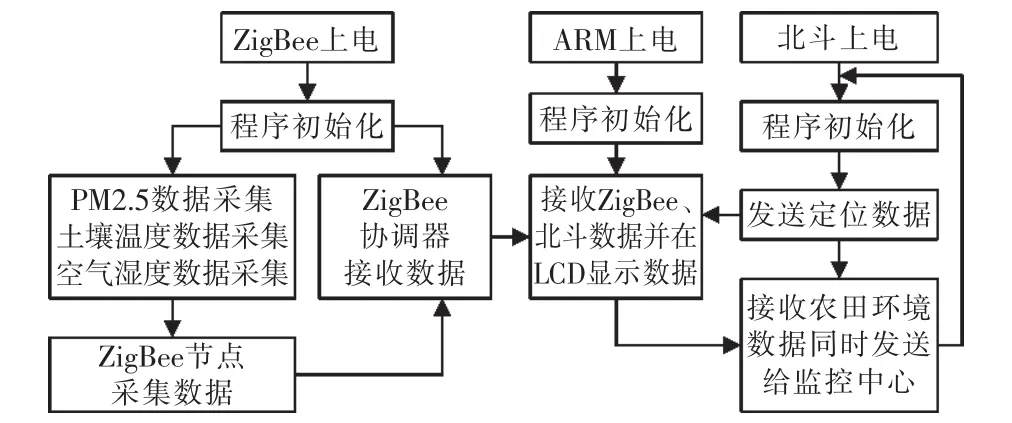
图7 系统软件流程Fig.7 Schematic flow chart of system software
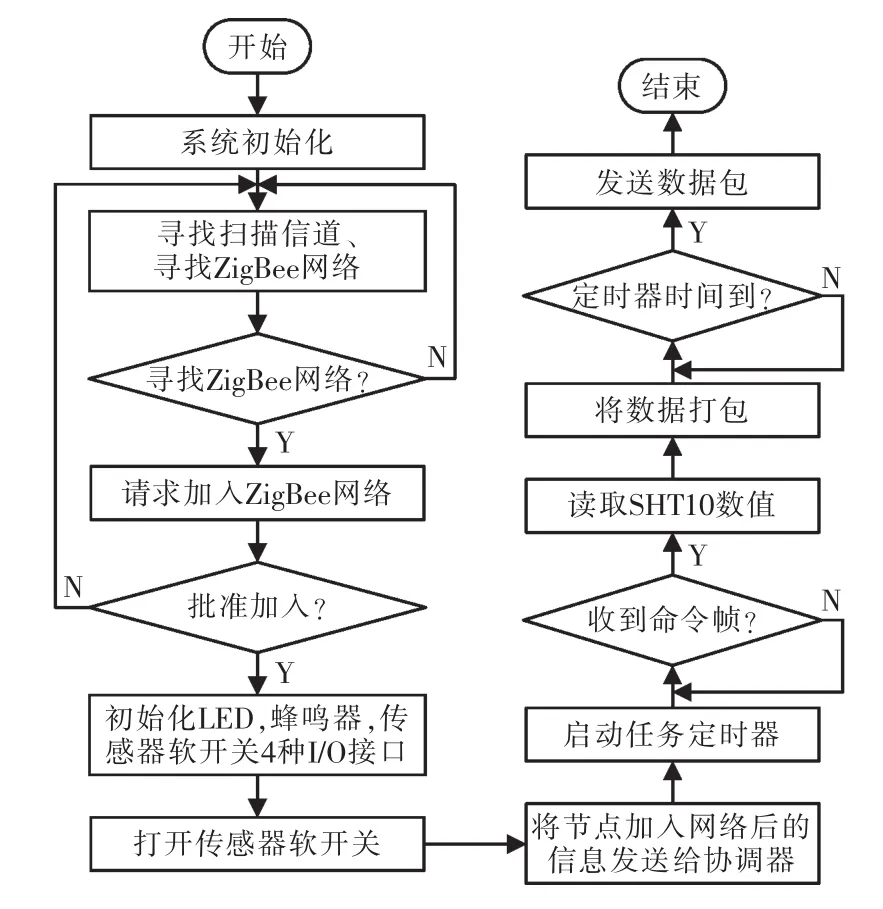
图8 路由与终端节点工作流程Fig.8 Routing and terminal node work flow chart
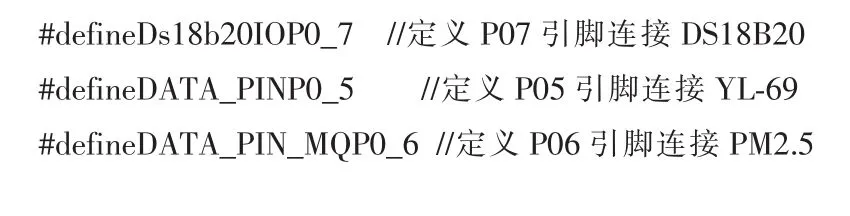
系统初始化主要是在上电后,对各个模块完成初始化,以便之后的程序加载[10],首先,加载头文件#include"MT_UART.h"来进行串口的初始化、#inclu de"ds18b20.h"来进行温度传感器DS18B20的初始化、#include"hal_adc.h"来进行芯片内部数模转换功能的初始化,#include"SampleApp.h"来进行ZigBee软件的初始化,对各个采集模块进行宏定义:
4 实验结果及分析
选取不同时间段对大田的温度、土壤的湿度以及空气的PM2.5进行测量,验证系统准确度,该系统测得的测量值与标准化设备计量得的标准值进行比较,并进行误差分析,具体如表1所示。
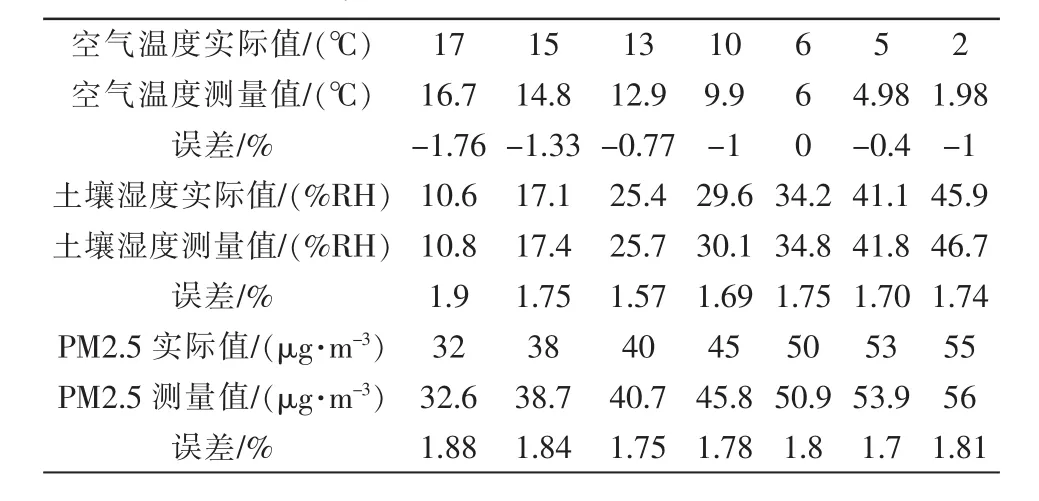
表1 温度、湿度及PM2.5标准值、测量值及误差Tab.1 Temperature,humidity and PM2.5 standard value,measured value and error
从表1中可以看出,实验中分别测量了7个不同时刻的温、湿度及PM2.5数据,对测得数据分析,该系统测量的温湿度存在一定的误差,温度的相对误差值在±2%的范围之内,测量值比实际值偏小;湿度误差值小于2%,测量值比实际值偏大;PM2.5实际值比测量值偏小,相对误差在±2.5%之间,在传感器的允许的范围之内。以上的实验数据说明,系统误差值在允许的误差范围之内,系统的准确性达到要求。
5 结语
本文设计的监测系统实现了远距离无线农田环境主要数据的采集,其中ZigBee终端可以自由组成无线传感器网,该网络具有容量大、传输距离远和可扩展等特点,可以对大面积农田的土壤湿度、空气温度以及空气质量PM2.5进行实时性远程监测,与传统的监测方式相比,不受时间和空间的限制,从而提高管理人员的工作效率,更加及时地了解农作物的生长环境。本文采用的北斗通信技术是我国未来卫星通信业务的主流,不受地域、时域和周边环境限制,实现对农田的远程监测,系统具有测量误差小、数据通信稳定以及效率高等特点,其应用领域和前景广阔。
[1]任伟,顾小莉,王丽华.基于ZigBee的低功耗无线温室环境监测系统设计[J].农机化研究,2014(9):103-107.
[2]王士明,俞阿龙,杨维卫.基于ZigBee的大水域水质环境监测系统设计[J].传感器与微系统,2014,33(11):102-105.
[3]于泓博,于泓琦,王志良.基于北斗和ZigBee的环境质量监测系统设计[J].计算机测量与控制,2014,22(8):2374-2376.
[4]Qian Y,Wu X,Lu J.Sencond-order consensus of multi-agent systems with nonlinear dynamics via impulsive control[J].Neuro computing,2014(125):142-147.
[5]Meng D,Jia Y.Formation control for multi-agent systems through an iterative learning design approach[J].International Journal of Robust and Nonlinear Control,2014,24(3):340-361.
[6]Sahu P K,Wu E H K,Sahoo J.Dual RSSI trend based localization for wireless sensor networks[J].IEEE Sensors Journal,2013,13(8):3115-3123.
[7]De Almeida A,Santos B,Paolo B,et al.Solid state lighting review-potential and challenges in Europe[J].Renewable and Sustainable Energy Reviews,2014(34):30-48.
[8]Li J B,Hu Y Z.Design of ZigBee network based on CC2530[J].Electronic Design Engineering,2011,19(16):108-111.
[9]Cakici S,Erturk I,Atmaca S,et al.A novel cross-layer routing protocol for increasing packet transfer reliability in mobile sensor networks[J].Wireless Personal Communications,2014,77(3):2235-2254.
[10]Tan D D,Kim D S.Dynamic traffic-aware routing algorithm for multi-sink wireless sensor networks[J].Wireless Networks,2014,20(6):1239-1250.
