动车组主变流器故障诊断技术研究
2016-01-18李岚
李岚

摘要:动车组的机车主变流器检测参数多、结构复杂、参数之间关系复杂;故障现象多、同一故障现象的产生原因可能又不同;工作电压、电流很大,直接人工诊断对人的生命安全构成严重危险。该文利用现代故障诊断技术,对动车组的机车主变流器故障进行非人工的智能诊断,可有效地对机车主变流器的故障进行准确诊断;提高主变流器的诊断效率,同时,对铁路现场的故障诊断技术、设备故障诊断学科的发展,都具有积极的促进作用。
关键词:动车组;机车主变流器;参数检测;故障诊断。
中图分类号:TP334 文献标识码:A 文章编号:1009-3044(2015)33-0144-02
Research of EMU Main Converter Fault Diagnosis Technology
LI Lan
(Hunan Railway Professional Technology College, Zhuzhou 412001, China)
Abstract: EMU locomotive converter complex structure, test parameters and more complex relationship between the parameters; fault phenomenon more, causes the same fault phenomenon may yet different; working voltage, current large, direct labor diagnosis of human life and safety pose a serious danger. In this paper, fault diagnosis using modern technology, the EMU locomotive converter non-artificial intelligent fault diagnosis, can effectively locomotive converter for accurate fault diagnosis; improve primary converter diagnostic efficiency while, the development of railway site fault diagnosis, fault diagnosis disciplines, have a positive role in promoting.
Key words: EMU; locomotive converter; parameter detection; fault diagnosis.
动车组的机车主变流器检测参数多、结构复杂、参数之间关系复杂;故障现象多、同一故障现象的产生原因可能又不同;工作电压、电流很大,直接人工诊断对人的生命安全构成严重危险。
本文利用现代故障诊断技术,对动车组的机车主变流器故障进行非人工的智能诊断,可有效地对机车主变流器的故障进行准确诊断;提高主变流器的诊断效率,有望节省大量劳动力。同时,对铁路现场的故障诊断技术、设备故障诊断学科的发展,都具有积极的促进作用。
1 测试系统中高精度恒温的实现
1.1 机车故障研究现状
在现代诊断技术的迅猛发展状态下,机车故障诊断技术在国外相应的诊断设备中已经应用在了机车中。我国机车故障诊断技术起步比较晚,经过多年的努力取得一定进步,但真正能投入现场使用的诊断设备不多,目前仍处于理论研究阶段。从当前的发展趋势来看,机车故障诊断技术将向信息诊断、智能诊断有机融合、集成的方向发展。
1.2 支持向量机在设备故障诊断中的研究现状
当前,当机器设备出现各种故障后,一般有两种比较常见的诊断方法:
1)传统方法。主要以时间序列方法为主。
2)人工智能方法。主要以神经网络法为主。
而新兴的一种方法--支持向量机、简称SVM,正在得到越来越多的关注。该方法可以实现实际风险最小化,在寻求结构风险最小化的前提下,可以在少量样本量较少的分析情况下,学习效果也会较好。此外,SVM可以归结为一个二次优化问题,其解是全局最优解,在处理非线性分类、回归等实际问题时非常实用并且有效。
2 故障处理流程分析
首先利用电压互感器构成信号采集电路取样输出电压,通过小波分析法对输出电压进行处理,提取主变流器的故障信息;进而,构造故障特征向量以表征主变流器的各种故障;最后,利用支持向量机(或神经网络)实现对故障类别的智能判别。大致的流程图如图1所示。
3 主变流器故障的分布、故障原因
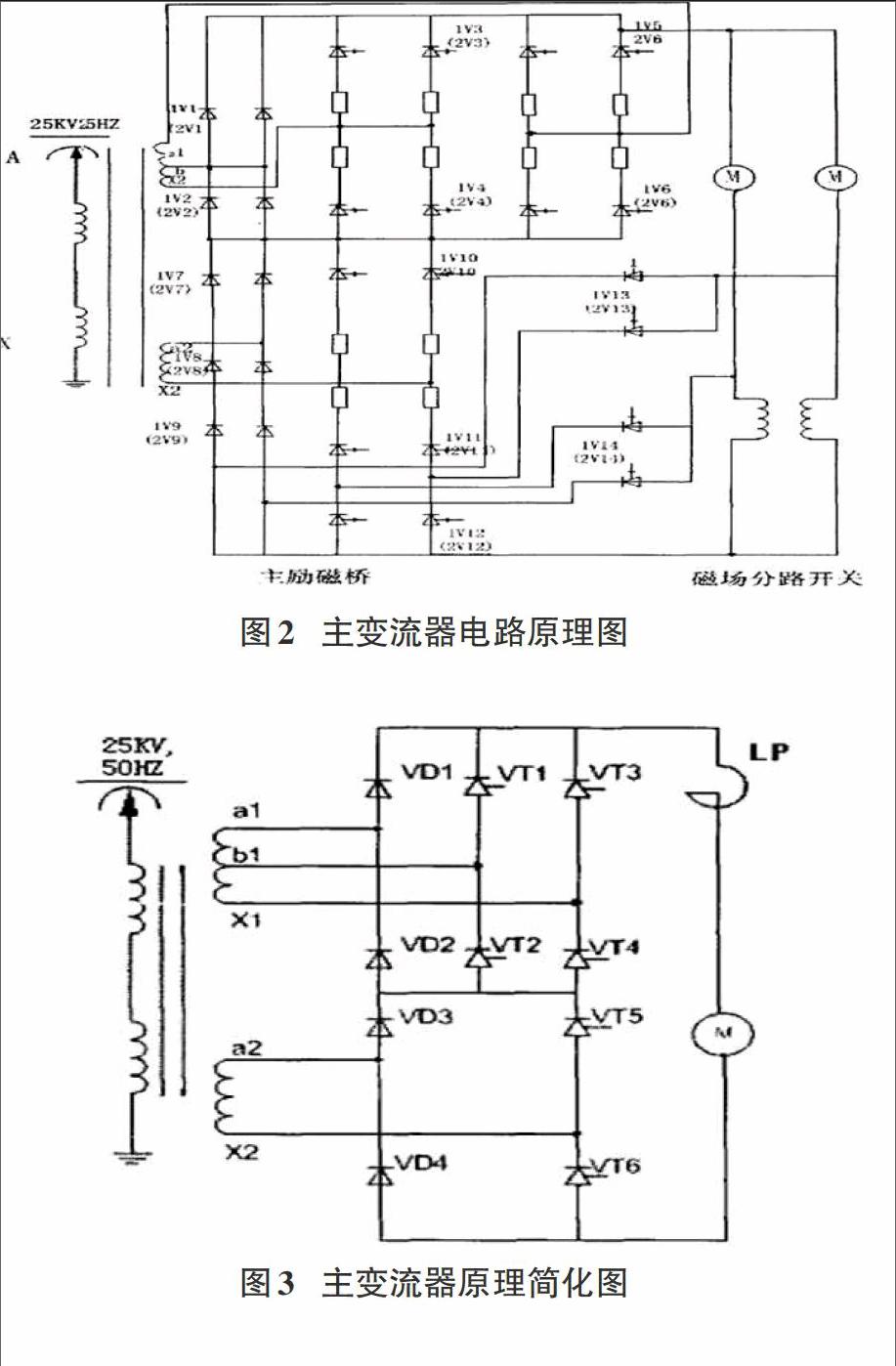
1)主变流器电路原理
电路如下图2。
第一部分由1V1(2V1)到1V6 (2V6) 6个桥臂组成,其中1V1(2V1)和1V2 (2V2)为整流臂,它们分别与1V3 (2V3),1V4 (2V4)及1V5 (2V5),1V6 (2V6)可控臂组成两个控桥。
第二部分由1V7 (2V7)到1V2 (2V12) 6个桥臂组成,它只有一个半控桥,由整流臂1V7 (2V7) , 1V8 (2V8)和可控臂1V10 (2V10) , 1V11(2V11)组成,在机车牵引时作相控整流,制动时提供励磁电流。
2)主变流器各功率元件处于各牵引工况时的工作情况分析
为了便于分析我们把主变流器的电路结构进行简化如图3。
1)启动初期阶段
此阶段仅由UD3, VD4, VTS,VT6处于半控桥移相导通工况;VT6组成的大段桥提供相控电源。VD3, UD4, VT5。VD1, VD2续流;UT1, VT2, VT3, VT4未导通
2)启动中期阶段
此阶段由VD3, VD4, VTS, VT6组成的大段桥以及VD1, VD2, VTl, VT2组成的小段桥提供相控电源。VD3, VD4, VTS, VT6导通半个周期;UD1} VD2, UTl, VT2
处于半控桥移相导通工况;VT3, VT4未导通。
3)启动末期及额定运行阶段
此阶段由整个不等分三段半控桥提供相控电源,UDl, UD2, VD3, VD4, VTS,
VT6导通半个周期,VTl, VT2, VT3, VT4处于移相导通工况。
4)制动阶段
此阶段电力机车主电路通过两位置开关的转换,电路连接形式己变化。VD3、VD4, VTS, VT6仅给电机提供励磁电流,但VD1, VD2始终流过电机的制动电流。假设电机总制动电流为IZ,在a,x1段桥进入加馈制动前,VD1, VD2始终为续流工况。
4主变流器故障分析与总结
本文在分析变流器的工作情况时,重点考虑了变流器的输出参数。由于电感和牵引电机的作用,电流的输出滞后且为脉动状态,且谐波含量很大,不易进行信号处理。而输出电压波形基本不随负载的变化而改变,只有当整流元件出现故障时,其输出电压波形才会有明显的畸变,通过实验分析,可以及时发现故障并进行准确定位。
参考文献:
[1] 黄采伦,樊晓平,陈特放.列车故障在线诊断技术及应用[M].北京.国防工业出版社,2006.
[2] 王道平,张义忠.故障智能诊断系统的理论与方法[M].北京:冶金工业出版社,2001.
[3] 丁福锡,杜永平.机车车辆故障诊断技术的发展[J].铁道机车车辆,2004,24(4):24-30.
[4] 王兆安,黄俊.电力电子技术[M].机械工业出版社,2003.
[5] 谢步明.韶山:型电力机车[M].中国铁道出版社,1998.
[6] 武森,高学东,M.巴斯蒂安.数据仓库与数据挖掘[M].北京:冶金工业出版社,2003.
[7] 章成志.数据挖掘研究现状及最新进展[J]..南京工业职业技术学院学报,2003(6):15.
[8] 袁胜发,褚福磊.SVM多分类算法及其在故障诊断中的应用[J].振动工程学报,2004,17(5):420-422.
