氮气弹簧在爬缆机器人中的应用
2016-01-16李想,邓斌,吴文海等
氮气弹簧在爬缆机器人中的应用
李想,邓斌,吴文海,于兰英
(西南交通大学机械工程学院,四川成都610031)
摘要:爬缆机器人被越来越多地应用于斜拉桥缆索检测。通过对爬缆机器人在上行途中的越障性能分析,可得到越障时压紧力改变越小机器人越障能力越好,据此提出使用氮气弹簧代替普通弹簧为机器人提供压紧力。通过实例对比证明了氮气弹簧在改善机构越障性能上有显著作用。
关键词:斜拉索爬缆机器人越障氮气弹簧
中图分类号:TP242.2文献标识码:B
作者简介:李想(1989-),女,籍贯云南玉溪,硕士研究生,主要研究方向,机电一体化技术,工业机器人。
收稿日期:2015-04-05
Application of nitrogen gas spring in cable-climbing robot
LI Xiang, DENG Bin, WU Wenhai, YU Lanying
Abstract:The cable-climbing robots are widely used in the cable inspections. By analyzing the performance of the robot crossing obstacle, the paper proves that when the robot crosses obstacles, the recruitment of the pressing force has an effect on the ability of obstacle crossing. Based on this fact,it suggests to use the nitrogen-gas spring instead of cylinder spring. A comparative example shows that the nitrogen gas spring has better performance in improving the robot’s ability of obstacle crossing.
Keywords:stayed-cable;cable-climbing robot;obstacle crossing;nitrogen gas spring
0引言
缆索是斜拉桥最重要的构件之一。随着斜拉桥建造跨度的加大,缆索的尺寸不断增长数量不断增多,人工目测法和吊篮检测法已不再适用。近年来缆索检测机器人技术被提出并得到应用。
由于缆索常年暴露在外部环境中,表面的PE保护层会出现一定的损坏,需要运用爬缆机器人进行缆索表面检测。由于缆索表面的破坏会造成爬缆机器人无法越障甚至难以回收的问题。气动蠕动式的夹紧机构为气缸驱动的夹紧爪,对缆索表面的障碍物具有良好的适应性,但气动蠕动式机器人结构复杂且运动呈间歇性,不利于检测的平稳性。电动连续式由电机驱动滚轮连续爬升,但遇到较大的凸起障碍物时,滚轮可能会卡死。
本文针对电动连续式爬缆机器人的越障问题,结合电动连续式爬缆机器人结构,分析了影响机器人越障的因素,提出选用氮气弹簧代替一般弹簧来改善其越障能力。
1爬缆机器人的越障能力分析

图1 爬缆机器人结构
图1为一款典型的电动连续式爬缆机器人,其工作原理是由压紧装置为三台移动小车提供压力,使机器人与缆索表面产生足够大的摩擦力,电动机经过蜗轮蜗杆减速器及链传动带动摩擦轮实现爬升。压紧装置主要是由刚度一定的压簧通过铰链和小车连接。在机器人安装前,需要预调节压簧的位置使其产生一定的压力,将机构安于缆索时,根据缆索的直径大小,再一次调节小车与导向轮,使各个车轮和缆索之间紧密贴合。
如图2(a)所示,爬缆机器人沿光直缆索向上攀爬时,不考虑风阻,受到电机的驱动力、压簧的正压力、缆索的摩擦力以及机器人本身的重力。机器人上行的驱动力条件为:
6Ft≥6Ff+G
(1)
Ff=1/2μN
(2)
式中,Ft为单个驱动轮所受牵引力;Ff为单个驱动轮所受摩擦力;μ为驱动轮和缆索表面的动摩擦系数;N为夹紧装置给单个小车的压力;G为机器人的总重量。
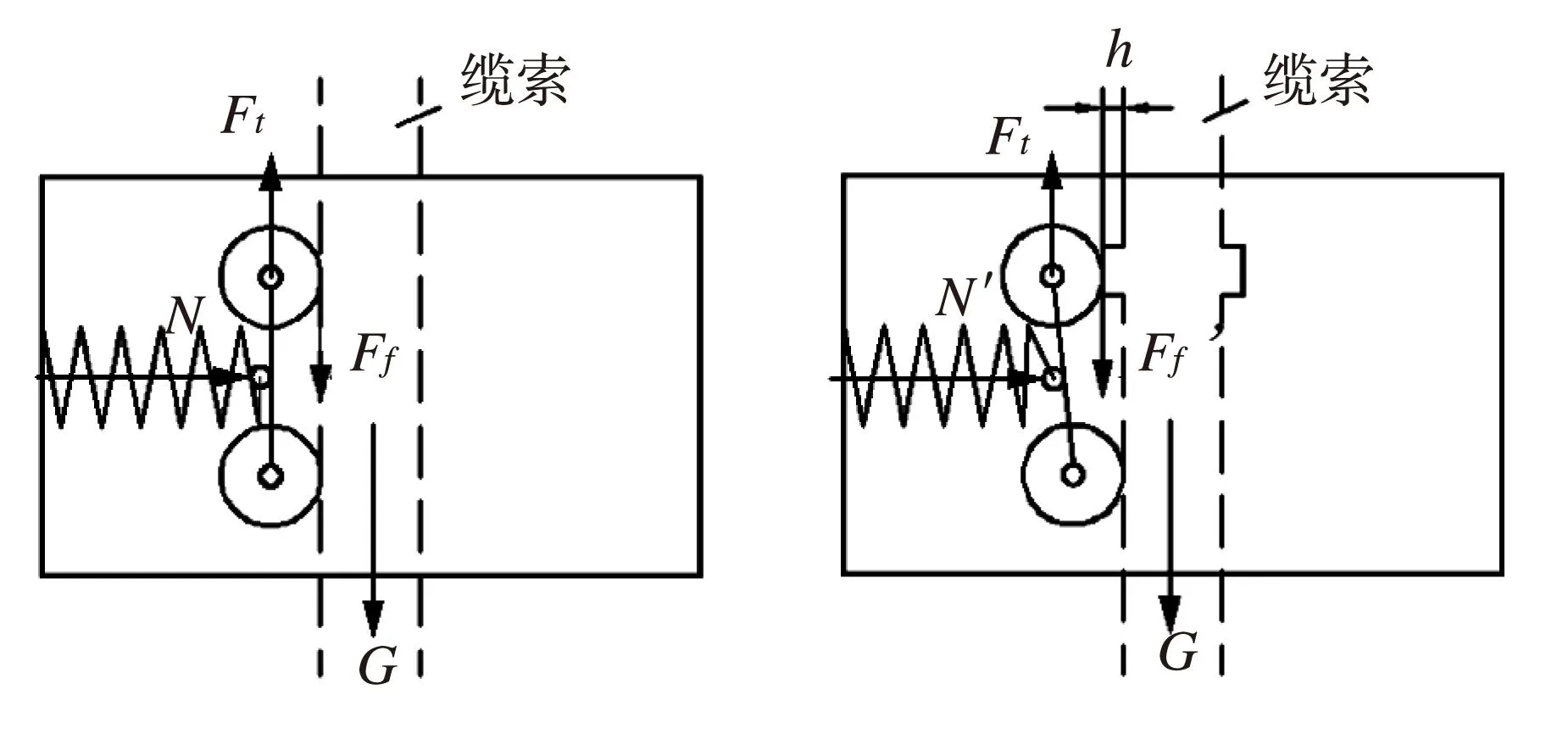
(a)机器人在光直缆索上 (b)机器人滚轮压在障碍上 图2 机器人上行受力分析
摩擦轮在和缆索接触时,当切反力过大时,轮子会出现打滑的现象。这个传递的切反力的极限值称为附着力,它的大小和驱动轮上法向反作用力成正比。要确保爬缆机器人的驱动轮和缆索之间不发生打滑,作用在驱动轮上的驱动力不能大于附着力,即
Ft≤FΦ
(3)
FΦ=1/2N×Φ
(4)
式中:FΦ为单个驱动轮的附着力;Φ为附着系数。
如图2(b),当前一排主动轮压过高度为h的环状阶障碍物时,弹簧的压缩量增加h/2,机器人能够越过障碍的驱动力条件为:
6Ft≥6Ff′+G
(5)
Ff′=μN′
(6)
N′=N+1/2kh
(7)
其中,k为弹簧的刚度系数。
由(1)-(7)得到障碍物的高度条件为:
(8)
根据(8)可得,选择刚度系数较小的弹簧,能够增加机器人的越障高度。弹簧的刚度系数描述的是单位形变量产生的弹力的大小,因此可得到:在越障时弹簧压力的变化量越小,爬缆机器人的越障性能越好。由于爬升又需要一定的压紧力才能提供驱动力,因此弹簧刚度不能取的太小,为此提出使用氮气弹簧代替普通弹簧来改善爬缆机器人越障性。
2氮气弹簧
2.1氮气弹簧的特点
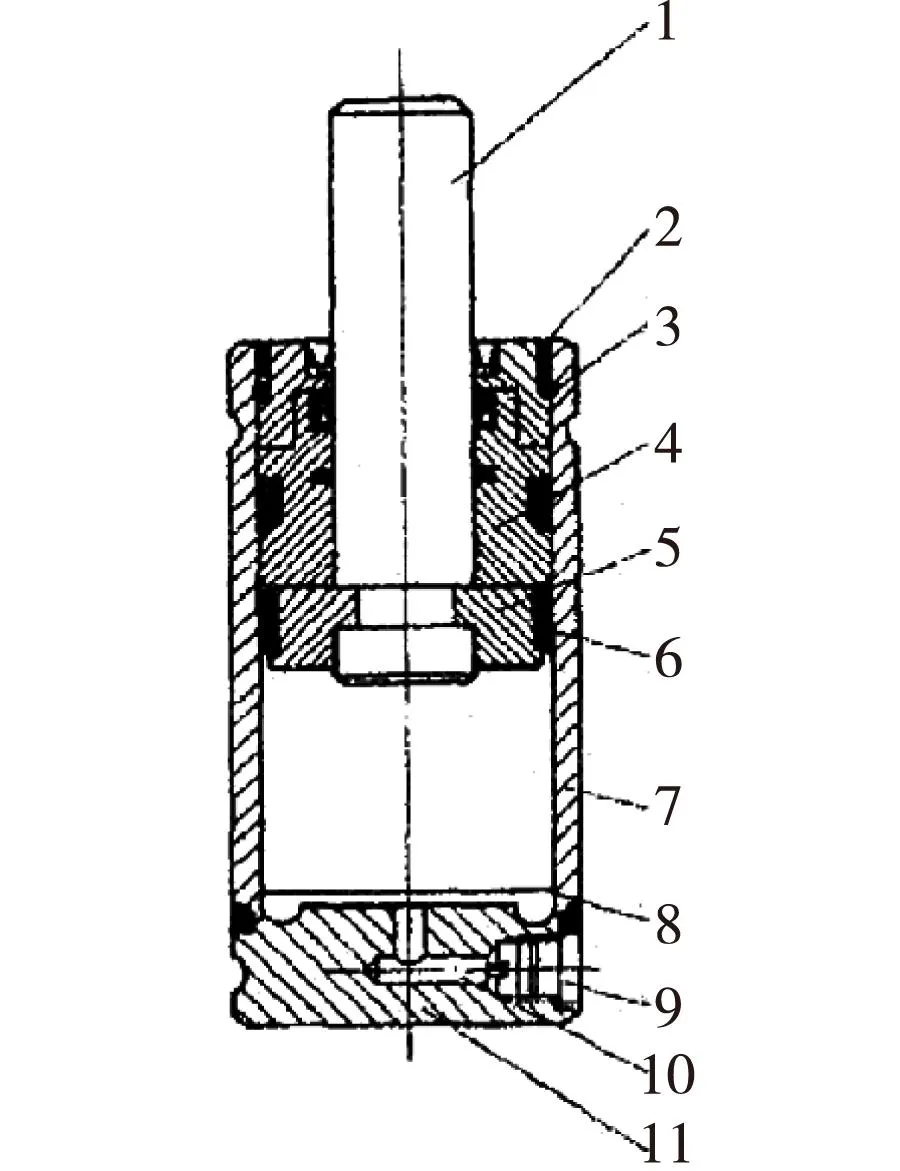
1.柱塞或活塞杆;2.端面防尘密封;3.钢丝圈;4.上内套;5支撑环;6.运动密封圈;7.缸体;8.内控容积;9.螺塞;10.充气嘴;11.缸底。 图3 氮气弹簧的结构图 [6]
氮气弹簧的原理是将高压氮气密封在缸内,通过活塞对气体压缩获得一定的弹压力。氮气弹簧已被应用在先进模具制造中,其最大的特点是能够在比较长的行程内保持一个基本恒定的弹压力。除此之外,氮气弹簧无需预紧就可产生一个较大的初始弹压力值;相比于普通弹簧受到长度的限制的缺点,氮气弹簧体积小,能够简化机器人结构减轻机器人重量。图3为氮气弹簧的结构图。
2.2设计实例
根据爬缆机器人爬升时受力分析及运动条件,对于自重为30kg的爬缆机器人,每根弹簧需给小车的压力值应为N=452N。
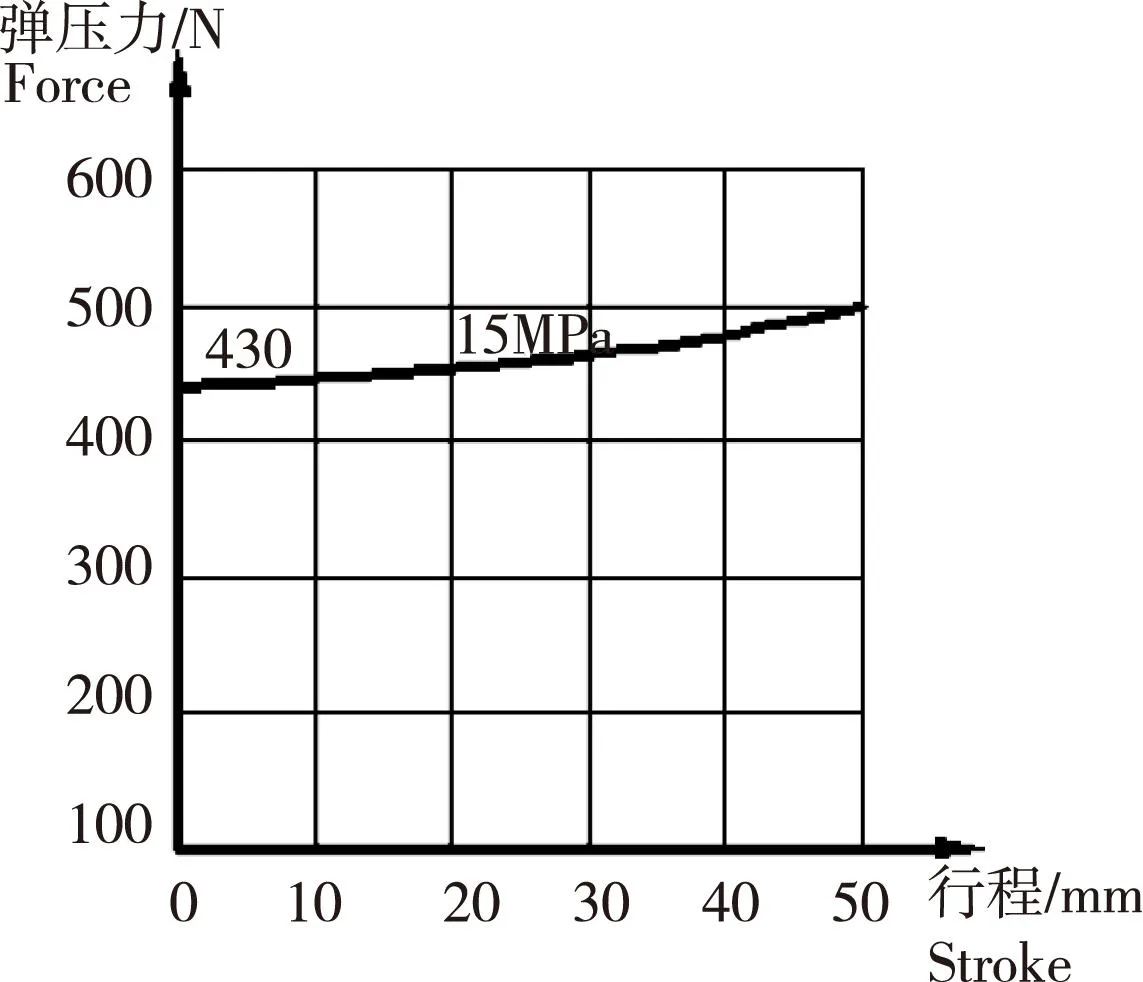
图4 MQB 0.45(450N) 弹压力-行程曲线图
如采用螺旋弹簧,由于机器人的结构限制,在允许范围内,选择出使弹簧刚度系数最小的弹簧参数为:总圈数n1=18,工作圈数n=16,弹簧中径D=25mm,钢丝直径d=3.8mm,弹簧刚度K=8.13N/mm。如采用氮气弹簧,根据弹压力值选择型号为MQB0.45(450)、公称弹压力为450N的氮气弹簧,力特性曲线见图4。考虑到初始行程为10mm,缆索上的障碍物高度不会高于10mm以及过长的行程会增加氮气弹簧的总长从而增加机构的体积,这里选择行程为20mm的氮气弹簧,总长为62mm。
当爬缆机器人单排驱动轮压过障碍物时,障碍物高度和弹压力增量的对应关系如图5(a)所示。弹簧的弹压力增量和障碍物高度呈斜率为k/2的线性关系。而氮气弹簧的特性是弹压力在一个比较长的行程里基本恒定,所以使用氮气弹簧,随着障碍物高度的增加,弹簧压力增量几乎为零。
当遇到较长障碍物,爬缆机器人前后驱动轮都压于障碍物上,障碍物高度和弹压力增量的对应关系如图5(b)所示。弹簧的弹压力增量和障碍物高度呈斜率为k的线性关系。而采用氮气弹簧,随着障碍物高度的增大,弹压力值的增量始终较小,压力几乎不变。
对比两种弹簧越障时弹压力的变化值,可得到使用氮气弹簧能明显改善爬缆机器人的越障性能。
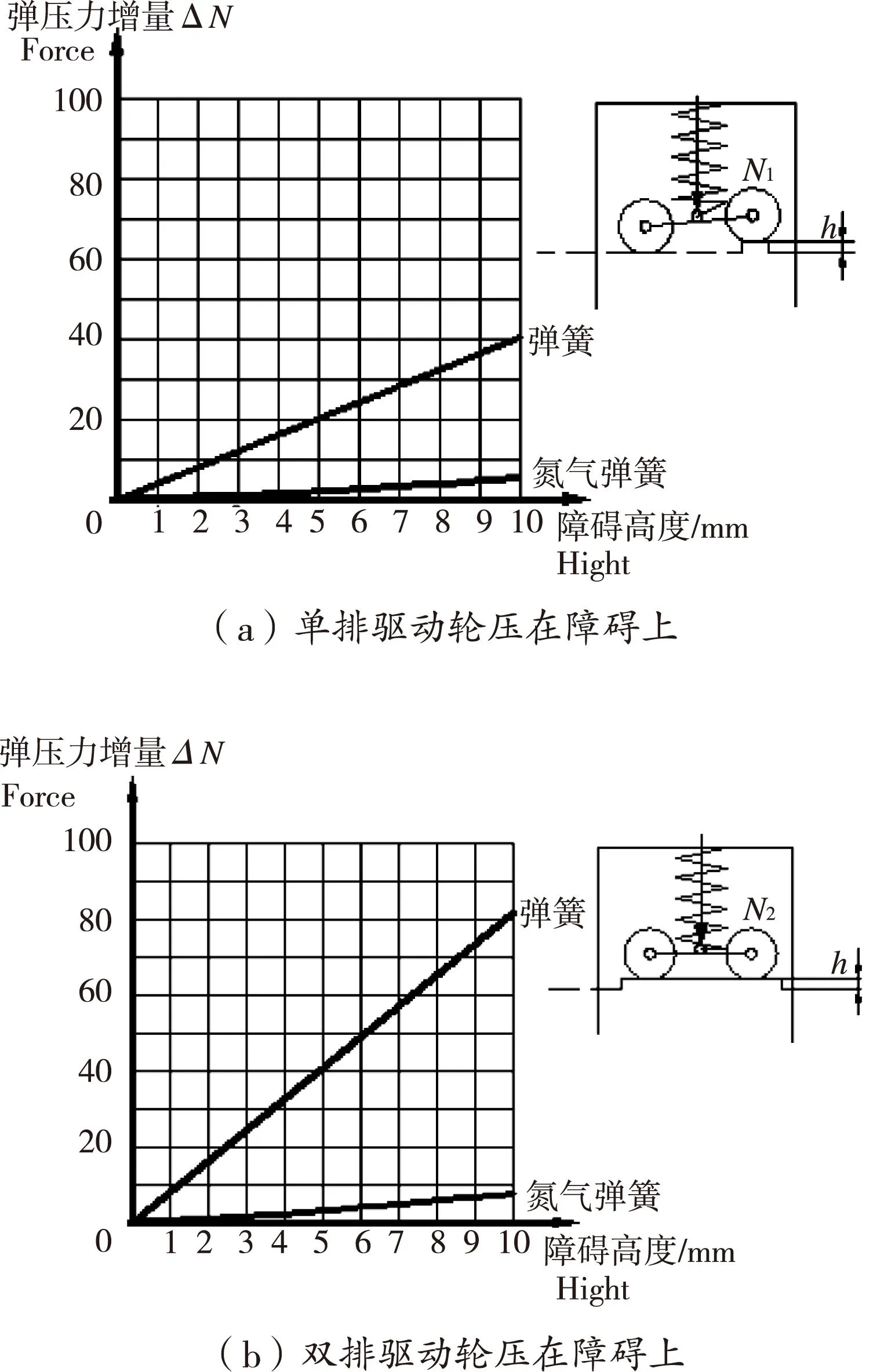
图5 障碍物高度-弹压力增量对应关系
3结论
在爬缆机器人的结构中,采用氮气弹簧代替普通弹簧为车轮提供比较恒定的正压力,基本解决了爬缆机器人在工作时遇到的卡死问题,大大提高了其越障性能,保证了爬缆机器人桥梁检测的工作效率。
参考文献
[1]张家梁,吕恬生,罗均.大倾斜度缆索机器人的研制[J].高技术通讯,2001,11(1):87,88-90
[2]张家梁,吕恬生,宋立博,王钧功. 电动连续式爬缆机器人设计理论分析与试验[J].上海交通大学学报,2003,37(1):58-61
[3]徐丰羽. 斜拉桥拉索检测机器人关键技术研究[D]. 南京:东南大学,2009
[4]刘建军.简介模具弹性元件的新秀——氮气弹簧[J].ValueEngineering,2010,29(11):87
[5]刘辉航,卢尚言,刘晶波,等.氮气弹簧的应用和发展[C]. 西安:中国机械工程学会,2001:1-10
[6]张胜.氮气弹簧在冲模中的应用[J].模具制造,2004,(9):35-39
