考虑驾驶员选择通过行为的机非严重冲突判别
2016-01-12王耀东,陈雨人
考虑驾驶员选择通过行为的机非严重冲突判别*
王耀东1陈雨人2▲
(1.同济大学交通运输工程学院上海201804;2.同济大学道路交通安全与环境教育部工程研究中心上海201804)
摘要现有的严重冲突判别方法并不适用于我国的机非严重冲突判别,而驾驶员的选择通过行为对交通事故能否发生起到了至关重要的作用,因此该研究考虑了驾驶员的选择通过行为,提出了机非严重冲突的判别方法。研究首先通过坐标转换技术对实验视频进行了预处理,之后对交叉口内机非冲突数据进行提取,应用概率统计的方法,着重考虑驾驶员的因素,提出临界冲突时间差(CTDTC)的概念表示驾驶员的选择通过行为。研究发现当冲突时间差(TDTC)的绝对值小于0.66 s时,驾驶员的选择通过行为会发生分歧,易引发交通事故,因此将其确定为机非严重冲突的判定条件,并进行了验证实验。验证实验结果表明,以冲突时间差(TDTC)的绝对值为0.66 s作为机非严重冲突的判别阈值时,观测的非严重冲突的累计频率接近15%,严重冲突的累计频率接近85%,该结果与累计频率法相符。该方法的优势在于提出了明确的严重冲突判别阈值,判别结果不受人的主观因素干扰,因此更加准确客观。
关键词交通安全;机非严重冲突;选择通过行为;冲突时间差;视频处理
中图分类号:U491.2文献标志码:A
收稿日期:2015-02-09修回日期:2015-07-06
基金项目*国家自然科学(批准号:51238008,51078270)资助
作者简介:第一王耀东(1990-),硕士研究生.研究方向:交叉口评价,冲突理论.E-mail: wydniceday@163.com
A Method of Identifying Serious Conflicts of Motor and
Non-motor Vehicles during Passing Maneuvers
WANG Yaodong1CHEN Yuren2
(1.TrafficEngineeringSchoolofTongjiUniversity,Shanghai201804,China;
2.EngineeringResearchCenterofRoadTrafficSafetyandEnvironment,
MinistryofEducation,Shanghai201804,China)
Abstract:Since the existing traffic conflict techniques are not applicable to identify serious conflicts between vehicles and non-motor vehicles in China. And drivers' passing behaviors through the intersections are proven to play a significant role in the occurrence of traffic collisions. The study proposed a method of identifying serious conflicts between vehicles and non-motor vehicles in consideration of drivers' passing behaviors. The traffic scene videos were pre-processed by applying coordinate transformation technique, then the conflict data of vehicles and non-motor vehicles at the intersections was extracted. Critical time difference to collision (CTDTC) was proposed to depict drivers' passing behaviors. The results show that the difference of drivers' passing behaviors increases, which tend to trigger collisions, when the absolute value of TDTC is less than 0.66 s. The test results also indicate that the cumulative frequency of non-serious conflicts is about 15% and 85% for serious conflicts, which are confirmed by a cumulative frequency method, when 0.66 s of TDTC is defined as an identification threshold. The proposed method defines a specific threshold of identifying serious conflicts between vehicles and non-motor vehicles and provides more accurate and objective results.
Key words:traffic safety; serious conflicts between vehicles and non-motor vehicles; driver's passing behaviors; time difference to collision; video processing technique
▲通信作者:陈雨人(1966-),博士,教授.研究方向:道路安全.E-mail: chenyr@tongji.edu.cn
0引言
随着城市化进程的加快和非机动车、机动车的保有量增加,机非冲突日益严重。在日本,1988年之后每年由于机非交通事故死亡的人数都要超过1000人,这大概占了交通事故死亡人数的10%。对于中国来说情况更加严重,大约38.7%的交通事故死亡事件是由于机非交通事故产生的[1]。
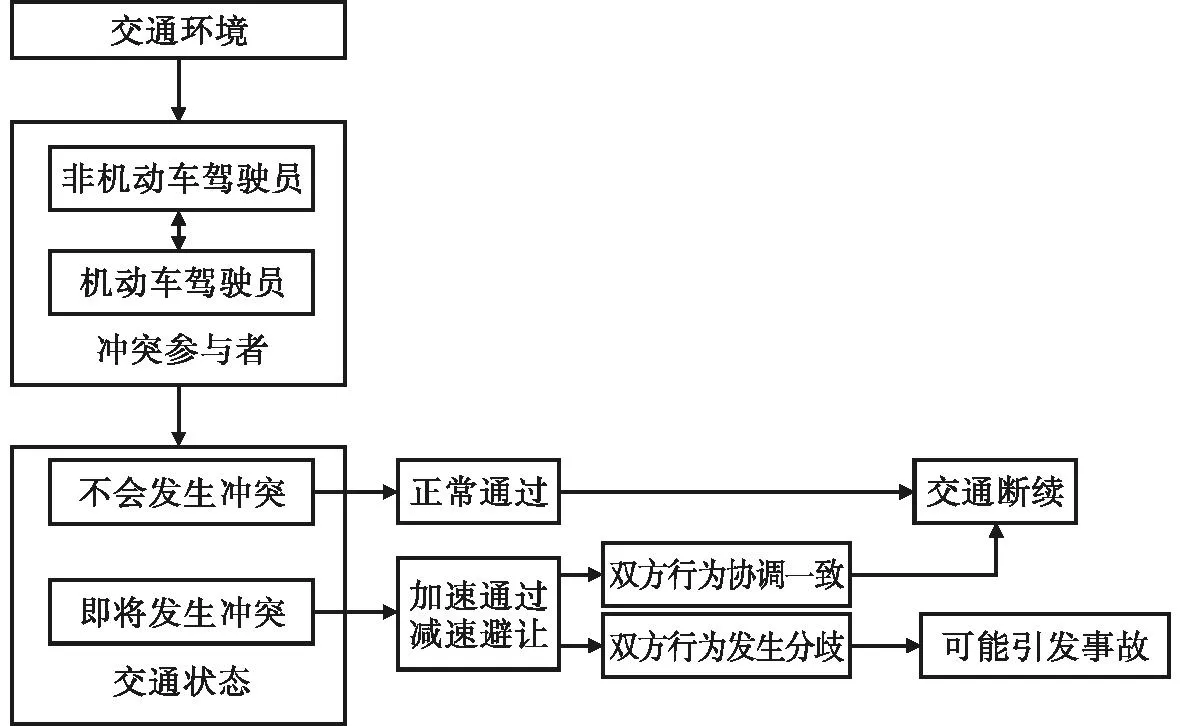
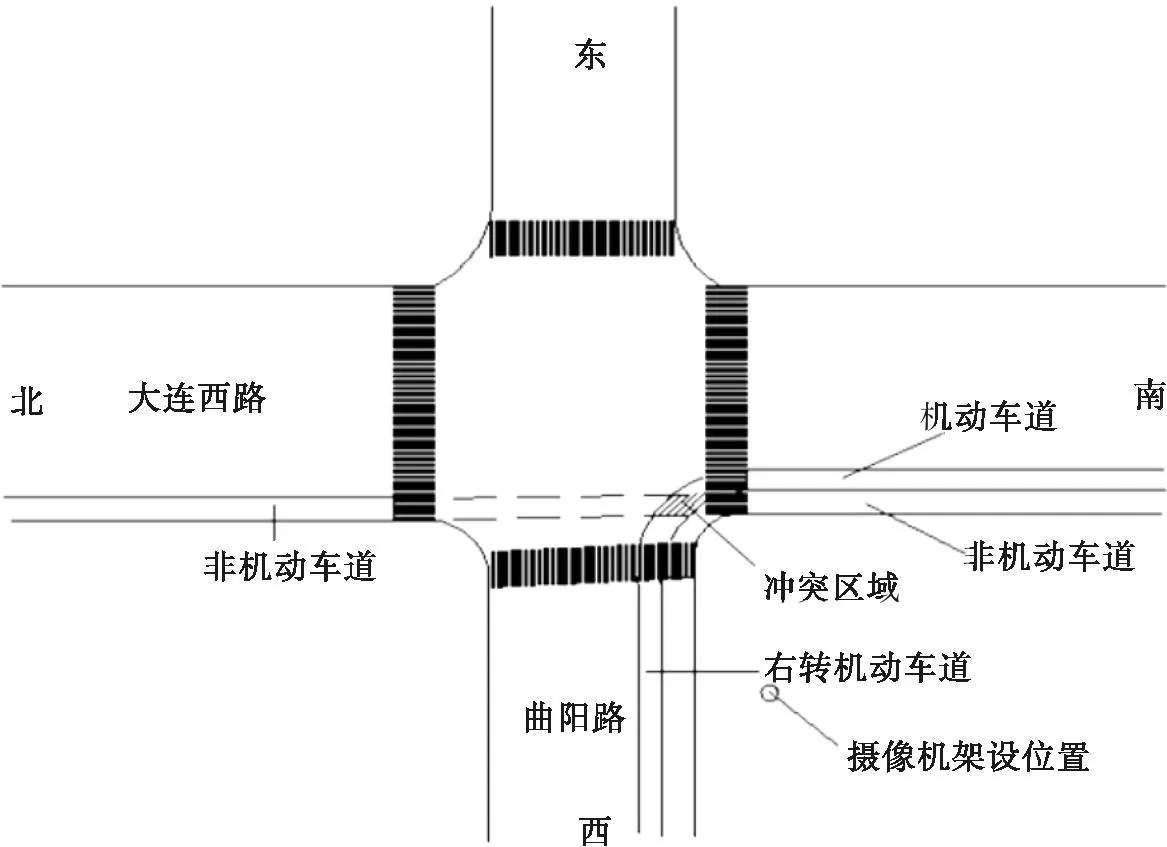
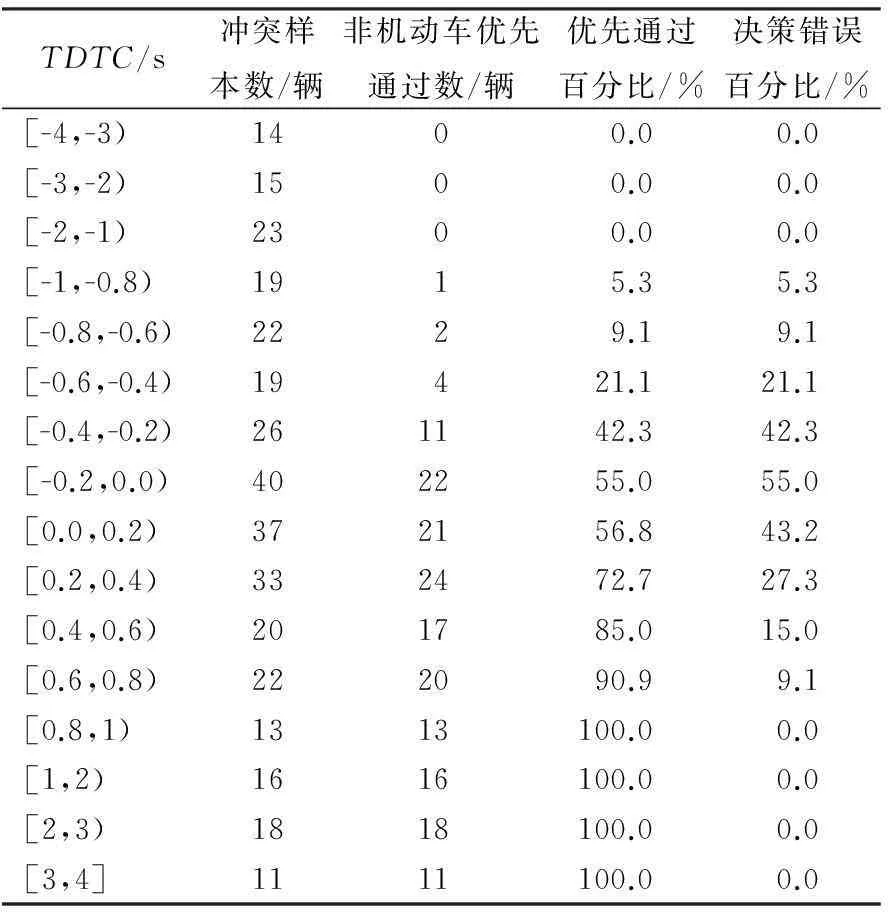
研究表明,严重冲突与事故之间有着良好的相关性,能够很好地表征道路交通的安全状况,因此,国内外很多学者开展了大量的关于交通冲突的研究,其中严重冲突的判别方法研究尤为重要。
界定严重冲突和非严重冲突的指标有很多,有一部分研究以车辆的制动过程为依据,通过比较冲突车辆间的距离与非完全制动距离(制动生效至制动停车的过程中车辆行驶的距离)来对严重冲突进行判定,认为冲突产生时,当车辆间的距离小于非完全制动距离,冲突为严重冲突,反之为非严重冲突[2]。然而该方法忽略了车速的影响,并且不同的车辆制动性能不同,因此该方法缺乏一定的合理性。理论上而言,综合时间、距离、速度等多个因素的指标可以对冲突严重程度界定的更准确[3-5],但由于进入交叉口的交通车流的复杂性,使综合指标的标定比较困难。目前,多数冲突研究组织采用先估算速度,进而判断车辆距离可能发生事故的冲突时间(TTC)的方法来判定是否为严重冲突,如果TTC小于某一临界值为严重冲突,否则为非严重冲突。美国公路研究所提出的临界值为1s,瑞典是1.5s[6]。国内有学者在确定临界值时,选定85%累积频率对应冲突时间值作为严重冲突与一般冲突的分界点,最终得到0 北京航空航天大学的刘淼淼等[8]提出了运动单元圆的假设,通过视频检测技术获取了冲突的微观数据,考虑了车辆的制动性能,将非完全制动停车距离与瞬时车速的比值作为冲突严重程度判别临界值,以冲突时间与临界值为参数建立了冲突严重程度的量化值。吉林大学的郭伟伟等[9]综合运用交通冲突理论、相对运动理论和费歇判别原理建立了以速度、距离、角度等变量为核心的综合交通冲突判别模型,该模型首先定义了临界冲突范围,并以车辆是否进入该区域为判断冲突是否发生的依据。这些方法对传统的严重冲突判别法做出了较大的改进,并且能够更加微观地研究冲突过程,但是需要观测的数据量较大,难以用于实际的大量样本观测。Laureshyn等[10]利用大量的微观冲突数据对多个描述交通冲突的参数进行了研究,其中包括TTC,时间优势(TADV),时间间隔(TG)等,但是并没有说明具体的参数适用于哪种情况,并且研究对象为机动车冲突,因此该研究可以为机非严重冲突研究提供方法,但并不完全适用。基于该研究,清华大学张盈盈等[11]对行人与机动车之间的冲突进行了研究,得到了行人与车辆之间的冲突安全评价模型,该研究表明,冲突时间差(TDTC)对行人机动车冲突的安全影响最大。 对于机非冲突,国外学者首先采用了临界通过间隙的方法来研究,Dean Taylor等[12]对部分机非冲突的临界间隙进行了观测,我国的景春光[13]将该研究成果应用在了机非冲突的判别和冲突率的计算上,但关注点仍在于驾驶员选择通过的概率,却没能给出机非严重冲突的判别标准。天津大学的曾炎盛[14]在其学位论文中认为,当冲突发生前机动车或非机动车的制动加速度大于3m/s2即发生了严重冲突,然而非机动车的速度变化频繁,导致车辆加速度变化的原因也有多种,单纯采用制动加速度作为判定严重冲突的指标缺乏说服力。 可以看到,严重冲突的判别方法虽然较为丰富,但是大部分都基于机动车之间的冲突,并没有考虑到机非冲突的特殊性。根据观察可以发现,我国的机非冲突与机动车之间的冲突有较大的不同,具体体现在: 1)面对即将发生的冲突,非机动车并不会提前很长时间减速。 2)冲突时间(TTC)很小的情况下,如果非机动车驾驶员采取了恰当的避险行为,如恰当的减速,冲突可以得到很好的消解,不会引发严重冲突。 3)我国的非机动车组成较为复杂,主要包括自行车和电动自行车,不同种类的非机动车运动性能有着很大的差异,因此单纯地从车辆运动性能角度出发判别严重冲突有所不妥。 因此,针对机非冲突的特殊性,亟须1种针对机非冲突的严重冲突判别方法,本文利用交通冲突理论,从驾驶员的选择通过行为入手,用临界冲突时间差的概念表示这种驾驶员行为,提出了机非严重冲突判别方法。 1考虑驾驶员选择通过行为的机非严重冲突判别方法 驾驶员的选择通过行为在交通冲突过程中起到重要作用,具体见图1。 图1 驾驶员选择通过行为作用流程图 Fig. 1 Function of driver′s passing through behavior 由图1可见,交通环境会影响到冲突参与者的选择通过行为,当双方的距离速度方向等保持在1个较为安全的范围内时,驾驶员认为不会发生冲突,双方不需要对是否优先通过做出决策即可保证交通的继续安全运行;当双方即将发生冲突时,双方驾驶员需要判断自身是否具有通行优势,如果认为自己具有优势则选择加速通过,如果认为对方具有优势则选择减速让行,当双方的选择通过行为协调一致时能够有效地避免冲突,而该行为不一致时则有可能引发交通事故。 可以看到,驾驶员根据自身具有的通行优势来做出选择通过行为,这种优势通过TDTC来体现,冲突时间差的概念见图2。 如图2所示,在发生冲突前的t时刻可以观测到机动车和非机动车的位置、速度和行进方向,根据t时刻的信息可以预测出双方的运行轨迹随时间的变化如图中虚线所示,即为t时刻双方运行轨迹随时间变化图的切线。根据预测可以得到的机动车通过冲突点的时刻t1和非机动车通过冲突点的时刻t2,t1减t2的差值即为TDTC。根据TDTC的定义可知,当TDTC<0时,机动车应当优先通过;当TDTC≥0时,非机动车应当优先通过。然而实际情况与预测的结果不一定相同,图中的实线为车辆实际运行结果,图2(a)中TDTC>0,实际情况也是非机动优先通过,说明双方驾驶员选择通过行为协调一致;图2(b)中TDTC>0,但实际情况为机动车优先通过,说明双方驾驶员选择通过行为发生分歧,此时容易引发事故。 图2 冲突时间差(TDTC)示意图 Fig. 2 Schematic diagram of TDTC 笔者认为,当TDTC在0附近范围时,机动车与非机动车的选择通过行为容易发生分歧,双方不能对自身是否应该优先通过做出准确的判断,选择通过行为易发生错误。而超出这一范围,双方的选择通过行为不会发生分歧。因此可以将TDTC的值域划分为3个部分,分别为:A区域,优先通过的所有车辆均为机动车,驾驶员选择通过行为发生错误的概率低;B区域,机动车与非机动车选择通过行为发生分歧,优先通过的车辆中两种车各占一定的比例,驾驶员选择通过行为发生错误的概率高;C区域,优先通过的所有车辆均为非机动车,驾驶员选择通过行为发生错误的概率低。见图3。 图3 驾驶员优先通过行为与TDTC关系示意图 Fig. 3 Relationship between driver′s passing through behavior and TDTC 因此,可以认为当1次机非冲突的TDTC属于B区域时,即为严重冲突,因为此时机非冲突满足: 1)冲突时间差的绝对值较小:2辆车先后到达冲突点的时间距离短,确定发生交通冲突。 2)选择通过行为易发生分歧:冲突双方对谁应当优先通过容易发生分歧,当选择通过行为发生错误时,容易引发交通事故。 接下来关键的研究在于通过交叉口机非冲突数据的提取,验证B区域是否存在,并确定B区域的范围。 2方法验证 对于城市信号交叉口,机动车与非机动车冲突主要发生在右转区域,而该区域也是城市信号交叉口的事故多发点。因此,以该区域为样本提取点。 选择上海市曲阳路大连西路交叉口内的非机动车与右转机动车冲突点为例,选择该交叉口原因如下:①该交叉口形状规则,十分典型,为4相位控制交叉口,交叉口长度为50m;②进口道设有右转专用车道,且右转车流量较大;③设有非机动车专用车道且非机动车流量较大;④该交叉口内有交通管制,所以大部分机动车与非机动车遵循信号控制通行。 所选择的交叉口情况和冲突区域位置见图4。 图4 样本提取点示意图 Fig. 4 Location to take samples 2.1像素坐标与物理坐标的转换 基于视频的交通冲突判别可以分为3个阶段,分别是交通参数的视频检测、坐标转换和交通冲突判别[15],本文也是基于这一思路进行研究。利用自编的Halcon,MFC相结合的视频处理程序获取机非冲突信息,需要提取车辆在不同时刻的实际物理坐标,而通过图像处理软件得到的是车辆的像素坐标,为了保证数据的精准,需要对像素坐标进行转换[16]。记(xp,yp)为像素坐标,(xg,yg)为对应的物理坐标,转换关系如下所示。 式中:C1,C2,…,C8为坐标转换矩阵的转换系数。为了求得转换矩阵的8个系数,选取4个已知点进行标定。由于已知点的图像坐标(通过图像软件获得)和实际坐标(通过现场实际测量获得)均已知,因此可以得到8个方程,求得8个未知数的值。在利用该方法时,要求选定的4个标定点满足: 即所选的4个点不能共线。 如图5所示,选取4个点作为标定点,由于样本获取位置为机非冲突区域,因此选取的4个标定点为该区域附近。每个点的信息中第1行为实际的物理坐标,第2行为像素坐标。经过计算,求得转换系数为 图5 标定点选择示意图 Fig. 5 Calibration points 为了验证该坐标转换效果是否足够精确,选另外3个已知点作为验证点,见图5中三角符号,分别是验证点1,物理坐标(6.00,27.00);验证点2,物理坐标(42.00,53.00);验证点3,物理坐标(38.00,3.00)。提取这3个点的像素坐标,转换得到这3个点的物理坐标分别为(5.95,26.90),(42.01,52.86),(37.99,3.12),求得3个验证点的平均误差为0.124m,该误差较小,可以接受,表明该坐标转换方法得到的点的物理坐标较为精确,可用于实验数据的提取。 2.2基础信息采集与计算 假设T(0)时刻为:右转机动车与非机动车其中一方占有冲突点的时刻,此时通过视频处理软件提取的数据信息包括机动车车头中点的像素坐标(xrp(0),yrp(0)),非机动车前轮最前点的像素坐标(xbp(0),ybp(0)),由T(0)的定义可知,(xrp(0),yrp(0))和(xbp(0),ybp(0))中必定有1个是冲突点,设冲突点的像素坐标为(xcp,ycp),则该点为已知。将时间点向前推2s和1s,分别定义为时刻T(-1)和T(-2),同样,记录这2个时刻的像素坐标信息(xrp(-1),yrp(-1)),(xbp(-1),ybp(-1)),(xrp(-2),yrp(-2)),(xbp(-2),ybp(-2))。 定义时刻T(-2)到T(-1)的平均车速为车辆的决策车速,记为Vd,表示车辆面对即将发生的冲突做出是否通过决策时的车速。根据冲突信息冲突时间TTC,计算方法如下。 (2) 右转机动车和非机动车的冲突时间分别记为TTCr和TTCb。 则单次冲突的冲突时间差TDTC可以由下式计算。 TDTC=TTCr-TTCb (3) 2.3数据分析 通过分析冲突参与者优先通过的比例与TDTC之间的关系来对机非严重冲突进行界定,由于冲突参与者只有机动车与非机动车,一方优先通过意味着这另外一方选择避让,因此非机动车与机动车的选择通过比例具有对称性,只需对一方进行分析。本文选择分析非机动车,根据曲阳路大连西路交叉口视频获取的数据进行分析。对于每一组冲突数据,在T(0)时刻,若非机动车先占领冲突点表明非机动车优先通过,否则代表机动车优先通过。当TDTC<-1s时,所有的机动车选择优先通过,当TDTC>1s时,所有的非机动车选择优先通过,因此笔者选取TDTC∈(-1,1)的数据进行分析,以0.2s为组距进行划分,得到非机动车优先通过比例与TDTC关系见表1。 表1 非机动车优先通过比例表 可以看到当TDTC在一定的范围内时,驾驶员的选择通过行为会产生分歧(决策错误百分比不为0),而在此范围之外驾驶员的选择通过行为十分一致,不发生矛盾。因此,基于驾驶员选择通过行为的TDTC划分方法成立。以TDTC值为横轴,非机动车选择通过的比例为纵轴,得到非机动车优先通过比例图,见图6,其中横轴数字为各个组的组中值。 图6 非机动车优先通过比例图 Fig. 6 Proportion of non-motor vehicle′s passing through priority 由图6可见,当TDTC越接近于0,驾驶员的选择通过行为越容易发生错误,引发交通事故的可能性就越大;越偏离0驾驶员选择通过行为发生错误的概率越小,引发事故的可能性就越小。可以看到,并不是所有的驾驶员将TDTC=0作为是否选择通过的分界点,对于不同的驾驶员,其选择通过行为也表现出一定的差异性。本文用临界冲突时间差(CTDTC)表示驾驶员的选择通过行为,其含义为:对于机动车,当TDTC 非机动车选择通过比例图与正态分布概率分布函数曲线(图中虚线)拟合良好,根据比例图的涵义,可以先假设CTDTC~N(μ,σ2),根据分布函数形态估计出μ=0,σ=0.4。然而,该假设是否合理需要进行假设检验,由于不存在样本的具体数值,只有样本的分布函数形态,因此对该假设进行K-S检验。 设F0(CTDTC)为N(0,0.42)的概率分布函数,F(CTDTC)为实际的临界TDTC概率分布函数。在TDTC∈(-1.2,1.2)内抽取50个样本构成F(CTDTC)进行检验。原假设与备择假设分别为 本测试选择显著性水平α=0.05,查表得到拒绝临界值D(50,0.05)=0.189,根据样本求得的D=0.174<0.189,因此不能拒绝原假设,即可以认为CTDTC~N(0,0.42)。 由此得到驾驶员选择通过行为发生错误的概率Pw与TDTC之间的关系如下。 (4) 式中:F(TDTC)为N(μ,σ2)的概率分布函数。 (5) 当驾驶员选择通过行为发生错误的概率Pw>5%时即不可忽略,令Pw(TDTC)=0.05求得TDTC=±0.66s,即当TDTC∈(-0.66,0.66)时,驾驶员选择通过行为发生错误的概率Pw>5%。因此,最终得到机非严重冲突的判定条件为: 2.4结果验证 为了验证该结果的有效性,选取上海市3个交叉口进行验证试验,选取的交叉口地点和相应的摄像机拍摄画面,见图7。 图7 验证实验交叉口选择 Fig. 7 Selected intersections for the verified test 选择的3个实验地点各具有一定的特点,其中:图7(a)交叉口的非机动车车流量较大,并且缺少相应的交通管制,非机动车易出现违规行为;图7(b)交叉口为2相位交叉口,非机动车流量相对较小;图7(c)交叉口机动车非机动车流量均较大,并且交叉口尺寸较大。每个交叉口视频选择30min进行人工观测,实验员根据传统的人工冲突观测手段标记出机非严重冲突和非严重冲突的样本(冲突车辆是否有明显减速、轨迹改变行为,距离较近等),之后利用本文提供的方法对冲突样本进行TDTC测量,得到3个实验点的机非冲突累计频率与TDTC的关系见图8。 图8 机非冲突累计频率与TDTC的关系图 Fig.8 Vehicles and non-motor vehicles′ conflicts cumulative frequency 可以看到,TDTC为0.66s时,实验人员观测的非严重冲突的累计频率接近15%,严重冲突的累计频率接近85%,这一比例也符合传统的累计频率法对严重冲突和非严重冲突判别的要求,因此笔者提供的机非严重冲突划分方法具有一定的有效性。 3 结束语 基于已有的冲突时间差的概念做了进一步的研究,提出了临界冲突时间差的概念,用其表示机非冲突中驾驶员的选择通过行为,并以此为介入点,得到了机非严重冲突判断的标准。本文的创新之处为在严重冲突判别标准的制定中考虑了驾驶员的主观决策行为,建立了驾驶员选择通过行为与冲突时间差之间的关系。通过视频处理手段获取了较为精准实验数据,提出了临界冲突时间差的概念,通过假设检验证明其服从正态分布,最终得到TDTC<0.66s为机非严重冲突的判别条件。 由于我国的非机动车保有量极大,非机动车引发的交通事故较多,而交通事故中最为主要的因素是“人”的因素,因此笔者提出的机非严重冲突判别方法具有一定的实际应用价值,对交叉口的安全评价和非机动车组织方法设计有一定的帮助。本文的不足之处在于实验数据都来源于上海市的交叉口,该结论是否适用于是其他城市的交叉口还有待进一步检验。另外,根据实验观察的结果和相关研究表明,车辆的速度会对选择通过行为产生一定的影响[18],因此下一步应当研究如何用车速对机非严重冲突判别方法进行修正,使结果更加精确。 参考文献 [1] LIU X, SHEN D, HUANG J. Analysis of bicycle accidents and recommended countermeasures in Beijing, China[J]. Transportation Research Record, 1995(1487): 75-83. [2]项乔军, 陆键, 卢川,等. 道路交通冲突分析技术及应用[M]. 北京:科学出版社, 2008. XIANG Qiaojun, LU Jian, LU Chuan, et al. Road traffic conflict analysis technique and application [M]. Beijing:Science Press, 2008. (in Chinese) [3]CHIN H C, QUEK S T. Measurement of traffic conflicts[J]. Safety Science, 1997, 26(3): 169-185. [4]SAYED T, ZEIN S. Traffic conflict standards for intersections[J].Transportation Planning and Technology, 1999, 22(4): 309-323. [5]OH J, KIM E, KIM M, et al. Development of conflict techniques for left-turn and cross-traffic at protected left-turn signalized intersections[J]. Safety Science, 2010, 48(4): 460-468. [6]张苏. 中国交通冲突技术[M]. 成都:西南交通大学出版社, 1998. ZHANG Su. Chinese traffic conflict technique [M]. Chengdu:Southwest Jiaotong University Press, 1998. (in Chinese) [7]卢川, 项乔君, 张国强, 等. 公路平交口交通冲突严重性的判定[J]. 合肥工业大学学报: 自然科学版, 2008, 31(5): 683-686. LU Chuan, XIANG Qiaojun, ZHANG Guoqiang, et al. Determination of the severity of traffic conflict at highway intersections[J]. Journal of Hefei University of Technology: Natural Science Edition, 2008, 31(5): 683-686. (in Chinese) [8]刘淼淼, 鲁光泉, 王云鹏, 等. 交叉口交通冲突严重程度量化方法[J]. 交通运输工程学报, 2012, 12(3): 120-126. LIU Miaomiao, LU Guangquan, WANG Yunpeng, et al. Quantitative method of traffic conflict severity at intersection[J]. Journal of Traffic and Transportation Engineering, 2012, 12(3): 120-126 (in Chinese) [9]郭伟伟, 曲昭伟, 王殿海. 交通冲突判别模型[J].吉林大学学报:工学版, 2011, 41(1): 35-40. GUO Weiwei, QU Zhaowei, WANG Dianhai. Traffic conflict discrimination model[J]. Journal of Jilin University:Engineering and Technology Edition, 2011, 41(1): 35-40. (in Chinese) [10]LAURESHYN A, SVENSSON Å, HYDEN C. Evaluation of traffic safety, based on micro-level behavioural data: Theoretical framework and first implementation[J]. Accident Analysis & Prevention, 2010, 42(6): 1637-1646. [11] 张盈盈, 刘帅, 邱志军, 等. 行人车辆冲突参数分析与安全评价[J]. 哈尔滨工业大学学报, 2012, 12(44): 123-128. ZHANG Yingying, LIU Shuai, QIU Zhijun, et al. Pedestrian-vehicle conflict parameter analysis and safety evaluation[J]. Journal of Harbin Institute of Technology, 2012, 12(44): 123-128. (in Chinese) [12]TAYLOR D, MAHMASSANI H. Bicyclist and motorist gap acceptance behavior in mixed-traffic[C]. Proceeding of the 78thAnnual Meeting of the Transportation Research Board, Washington D.C.:United States Nationd Research Councial, 1998. [13]景春光. 平面交叉口机非冲突机理及其应用研究[D]. 长春: 吉林大学, 2005. JING Chunguang. Research on the theory and application of vehicle-bicycle conflict at intersections[D]. Changchun: Jilin University, 2005. (in Chinese) [14]曾炎盛. 城市信号控制交叉口机非冲突机理研究[D]. 天津:天津大学, 2012. ZENG Yansheng. Study on the mechanism of vehicle-bicycle conflict at urban signalized intersections[D]. Tianjin: Tianjin University, 2012. (in Chinese) [15]曾炎盛,马寿峰,钟石泉,等. 基于视频检测的交通冲突判别方法和模型[J]. 交通信息与安全,2012, 30(4): 11-14, 61. ZENG Yansheng, MA Shoufeng, ZHONG Shiquan, et al. A video detection-based traffic conflict classification model[J]. Journal of Transport Information and Safety, 2012, 30(4): 11-14, 61. (in Chinese) [16]张方方. 基于视频的平面交叉口机动车交通冲突检测技术研究[D]. 上海: 同济大学, 2008. ZHANG Fangfang. Study on a computer vision system for detecting traffic conflict between vehicles at intersections[D]. Shanghai: Tongji University, 2008. (in Chinese) [17]肖永剑, 杨建国, 王兆安. 基于占先度的驾驶员冲突避碰决策模型[J]. 交通运输工程学报, 2009, 9(5): 116-120. XIAO Yongjian, YANG Jianguo, WANG Zhaoan, et al. Driver′s conflict avoidance decision model based on preemptive level [J]. Journal of Traffic and Transportation Engineering, 2009, 9(5): 116-120. (in Chinese) [18]黄迪, 钱大琳, 赵春龙. 平交口右转机动车穿越直行自行车行为研究[J]. 北京交通大学学报: 自然科学版, 2006, 30(3): 23-26. HUANG Di, QIAN Dalin, ZHAO chunlong. Study on behavior of right turning motor crossing through bicycles at grade intersection[J]. Journal of Beijing Jiaotong University: Natural Science Edition, 2006, 30(3): 23-26. (in Chinese)