基于LQG/LTR的电动助力转向系统控制研究
2016-01-12冯能莲石盛奇陈龙科北京工业大学环境与能源工程学院北京004安徽农业大学工学院安徽合肥30036
潘 阳,冯能莲*,王 军,石盛奇,陈龙科( .北京工业大学环境与能源工程学院,北京 004; .安徽农业大学工学院,安徽合肥 30036)
基于LQG/LTR的电动助力转向系统控制研究
潘阳1,冯能莲1*,王军2,石盛奇2,陈龙科1
( 1.北京工业大学环境与能源工程学院,北京100124; 2.安徽农业大学工学院,安徽合肥230036)
摘要:针对电动助力转向系统中可能存在的路面随机激励、转矩传感器测量所引起的干扰和噪声问题,利用CarSim/Simulink联合仿真软件平台,建立具有EPS的整车动力学模型,基于LQG/LTR设计EPS的控制策略,并对系统进行稳定性分析。结果表明:基于LQG/LTR控制的EPS能使驾驶员获得助力轻便性及满意转向路感,保证系统的稳定性,能有效抑制系统的干扰噪声。
关键词:EPS; LQG/LTR控制; CarSim/Simulink联合仿真
电动助力转向系统( Electric Power Steering System,EPS)依靠电动机提供助力,助力大小受电子控制单元( ECU)控制[1],能克服传统液压助力转向系统的不足,解决转向轻便性和路感的矛盾,在中小型轿车上得到广泛应用。目前对EPS控制的研究大多是基于提高EPS稳定性与车辆操纵稳定性两个方面。文献[2-3]建立EPS模型并进行系统性能分析及优化控制;文献[4-6]采用H∞反馈控制来实现控制目标;文献[7-9]采用LQG控制算法,设计最优控制器使EPS系统有较强的鲁棒性,提高汽车的操纵性能;文献[10]通过施加方向盘补偿转矩进而提高车辆稳定性;文献[11]利用CarSim软件联合Matlab/Simulink开发EPS系统仿真模型对EPS的控制策略进行研究。
本文利用CarSim/ Simulink构建EPS的联合仿真模型,建立EPS的LQG/LTR最优控制策略,以期获得良好的转向助力效果及转向稳定性。
1联合仿真模型
如图1所示,在MATLAB/Simulink中搭建转向轴助力式EPS系统及控制器模型,利用CarSim软件平台构建车辆模型,并进行CarSim/Simulink联合仿真模型接口设计。
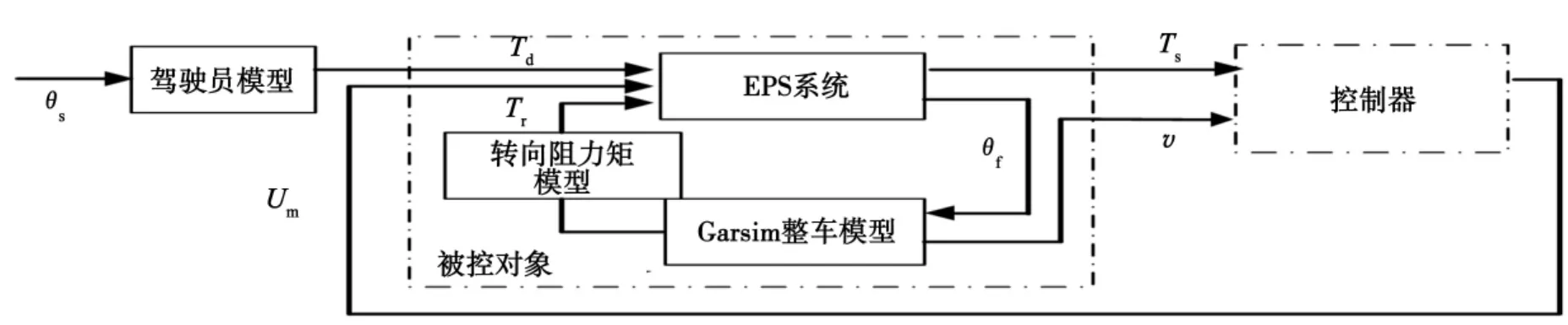
图1 CarSim/Simulink联合仿真结构框图
1.1 EPS系统模型
EPS主要包括转向盘总成、转向执行机构、转向器总成。传感器测得Td信号以及v信号,根据控制器电动机提供助力的大小与方向,实现助力转向[12]。利用Matlab/Simulink构建图2所示的转向轴助力式电动助力转向系统模型。
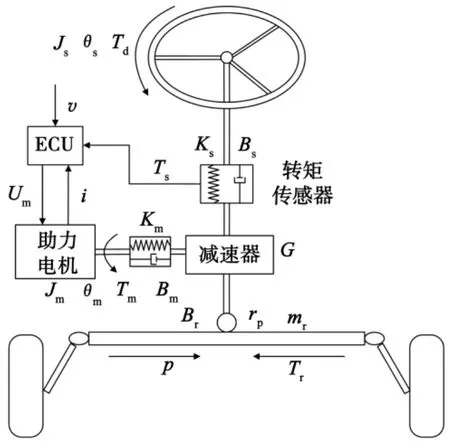
图2电动助力转向系统模型
转向盘与转向轴、齿轮-齿条、助力电机动力学方程分别为:
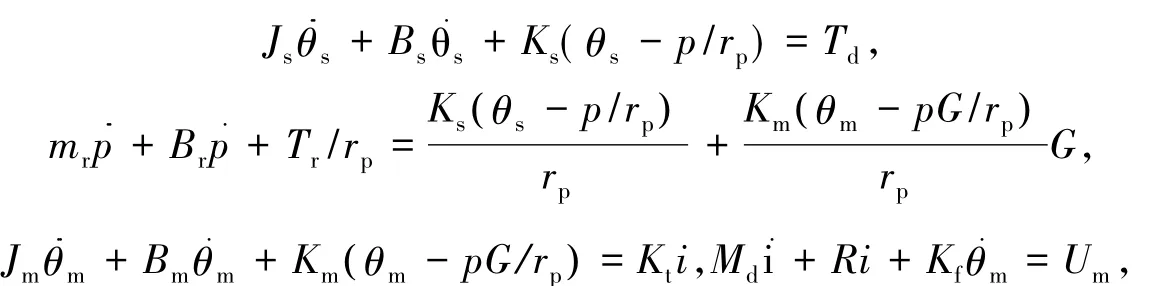
式中Md、R、Kf、Kt分别为助力电机力矩、电感、电枢电阻、反电势系数、转矩系数。
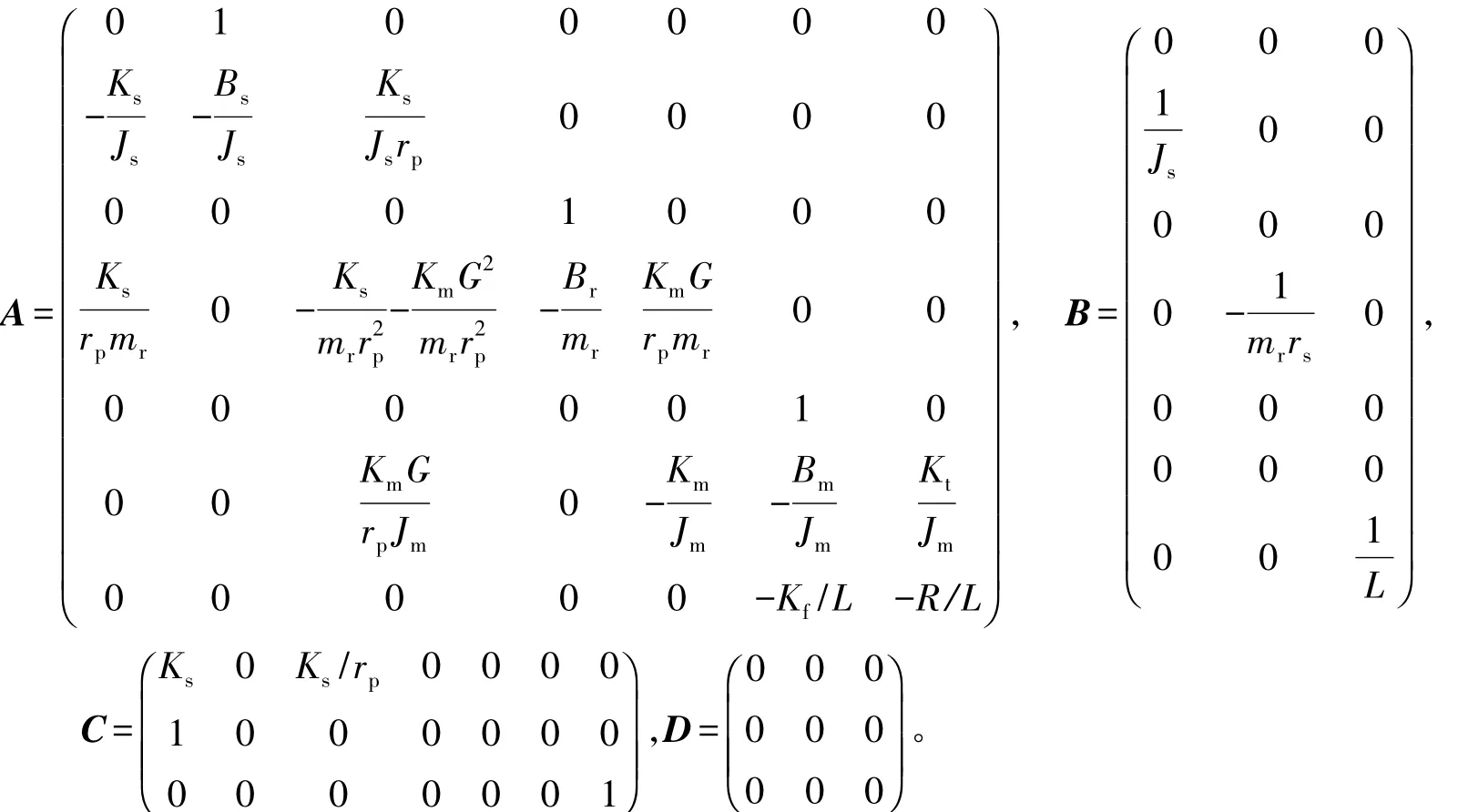
取:状态变量X =[θsθ.sp p.θmθ.mi]T,控制输入量U =[ TdTrUm]T,输出量Y =[Tsθsi]T,得到EPS的状态空间表达式为:
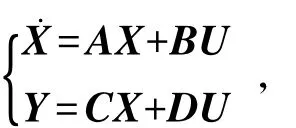
式中A、B、C、D分别为描述状态空间表达式的系数矩阵、输入矩阵、输出矩阵、前馈矩阵,1.2转向阻力矩模型
车辆行驶时,EPS所受到的转向阻力矩主要为回正力矩[10-11],有

式中: Tτx为侧向力引起的回正力矩,Tτx=Fxε,其中Fx为转向轮纵向力,ε为主销侧偏距; Tτy为纵向力引起的回正力矩,Tτy=Fy( tm+tp),其中Fy为转向轮侧向力,tm为轮胎拖距,tp主销后倾角拖距;τ为车轮后倾角;σ为主销内倾角;γ为车轮外倾角; Q为内外轮载荷偏移量; D为主销内移量。
1.3 CarSim整车模型
CarSim通过配置汽车各系统相应参数,获得高自由度、高精度的整车动力学模型[13]。对车体尺寸、悬架及轮胎特性进行参数设置。整车主要参数为:整车质量1 580 kg,质心高度590 mm,质心距前轴距离为1 237 mm,质心距后轴距离为1 300 mm,轮距1 420 mm,轴距2 537 mm。
1.4 EPS系统模型与CarSim整车动力学模型接口设计
为了实现CarSim与Matlab/Simulink的联合仿真,需要对CarSim车辆模型与Simulink的输入输出接口进行设置。将CarSim中已设置参数的车辆模型转换为CarSim S-Function,输出参数包括左右前轮侧向力与纵向力、纵向加速度、侧向加速度、横摆角速度、转向盘转角及车速,CarSim车辆动力学模型虚拟试验值作为转向阻力矩模型及EPS系统模型的输入参数。
2 EPS控制系统
2.1系统数学模型
由于路面随机扰动、传感器的测量噪声等影响,实际EPS系统具有一定的不确定性。为了有效抑制各种干扰对系统的影响,使系统保持良好的稳定性。设计EPS系统模型为
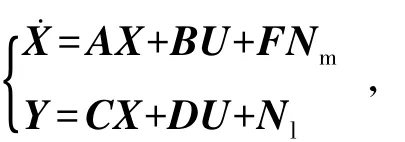
式中: Nm、Nl分别为随机模型噪声矩阵及量测噪声矩阵; F为模型噪声矩阵系数。
Nm、Nl是相互独立且均值为零的高斯白噪声信号,统计特性[7]为E{ Nm} = E{ Nl} = E{ NmNlT} = E{ NlNmT} =0; E{ NmNmT} =O≥0; E{ NlNlT} =O'≥0。O、O'分别为Nm与Nl的协方差。
2.2电动助力转向系统的LQG/LTR
1) LQG控制器设计
考虑系统随机输入噪声与测量噪声的线性二次型最优控制称为线性二次型高斯控制即LQG控制[14]。电动助力转向系统的LQG控制以助力转向特性为控制目标,使得目标电流与实际电流的差值尽量小。此外,为便于控制实现,应使控制量最小,二次型性能指标J的表达式为:

式中: I为目标电流; Im为实际反馈电流; Qm为助力转向电流误差量加权系数; Rm为控制量加权系数。
LQG控制器是由滤波最优状态估计器和LQR最优控制器按回路反馈形式串联构成,如图3所示。
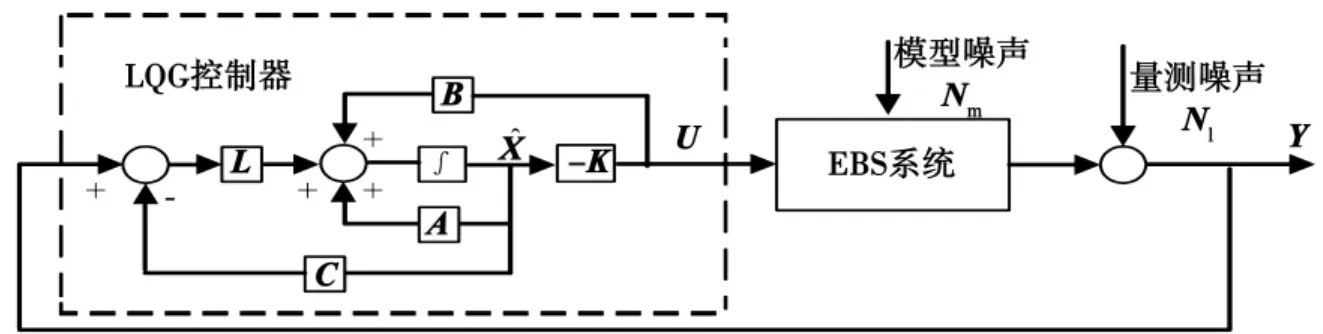
图3 EPS的LQG控制器结构
设X^为状态估计值,构造滤波最优状态估计器[15-16],有

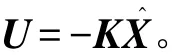
LQG的最优控制规律为:
2)回路传输恢复技术
由于LQG控制器稳定性较差,故需引入回路传输恢复技术( Loop Transfer Recovery,LTR)[17]。通过选择合适的卡尔曼滤波器最优反馈增益L,调节恢复增益q,使得LQG闭环控制系统的开环传递函数尽量逼近对应的LQR闭环系统的开环传递函数,即

式中: s为拉普拉斯变换自变量; In为拉普拉斯变换单位矩阵。
通过调节恢复增益q,LQG控制器的稳定性在被控对象的输入端得到了恢复。
3仿真结果及分析
转向盘转角正弦输入如图4所示,分别对原地无助力、车速分别为10、70 km/h时的转向助力控制进行仿真分析。
转向轻便性及路感仿真结果见图5。结果表明:原地无助力转向时转向盘转矩最大,此时转向最为沉重;当汽车行驶速度为10 km/h时,转向盘转矩明显降低,表明系统具有转向轻便性;随着车速增加,转向盘转矩逐步提高,保证了高速行驶下的转向路感。
图6是LQG/LTR控制器的Nyquist曲线。通过调节恢复增益q,使得LQG控制器闭环系统的开环传递函数逐渐逼近LQR控制器闭环系统的开环传递函数。图6中实线为LQR的Nyquist曲线,虚线1、2分别为q=10、q=1012时LQG的Nyquist曲线。由图6可以看出,当q=1012时,LQG控制器的开环传递函数最接近LQR控制器的开环传递函数曲线,并且曲线不包围复数平面上的点(-1,0j)点,表明所设计的LQG/LTR控制器具有较好的稳定性。
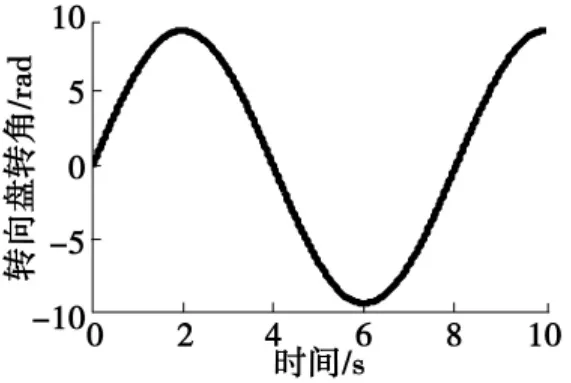
图4转向盘转角输入
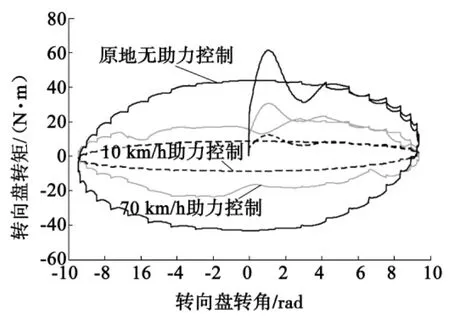
图5转向盘转角-转矩关系曲线

图6 LQG/LTR控制器的Nyquist曲线
有、无LQG/LTR控制时分别对电动助力转向系统进行仿真试验,研究EPS系统对路面干扰和传感器噪声的响应,进而分析系统对干扰噪声的抑制效果。
仿真时间为1 s,路面随机干扰信号对转向轴转矩的脉冲响应见图7。由图7可以看出,有LQG/LTR控制时,EPS系统在受到路面随机干扰时转向轴测量转矩所受到的扰动响应很小,表明EPS抗干扰性增强,具有较好的鲁棒性。
传感器噪声对转向轴测量转矩的阶跃响应见图8,可以看出LQG/LTR控制EPS的转向轴测量转矩对于传感器噪声的扰动所产生的响应很小,表明LQG/LTR控制方法能较好地抑制传感器随机噪声对转向系统力矩的影响,从而使驾驶员较好的获取路面信息,优化转向路感。
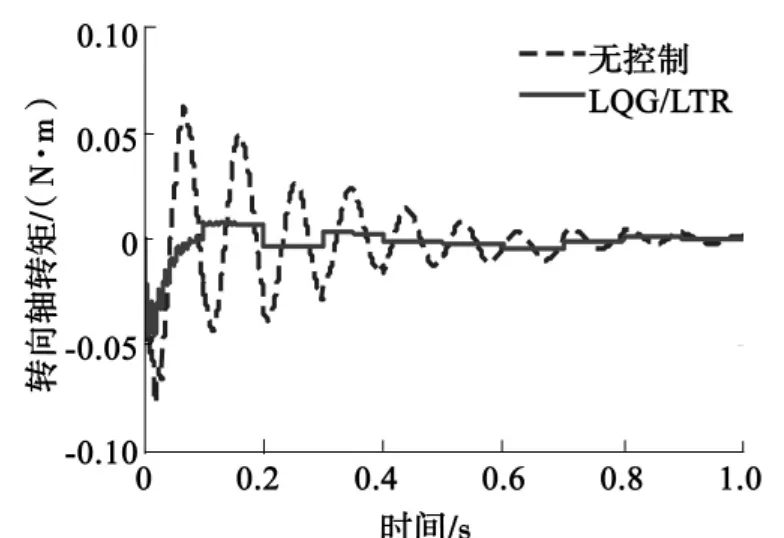
图7路面随机干扰信号对转向轴转矩的脉冲响应
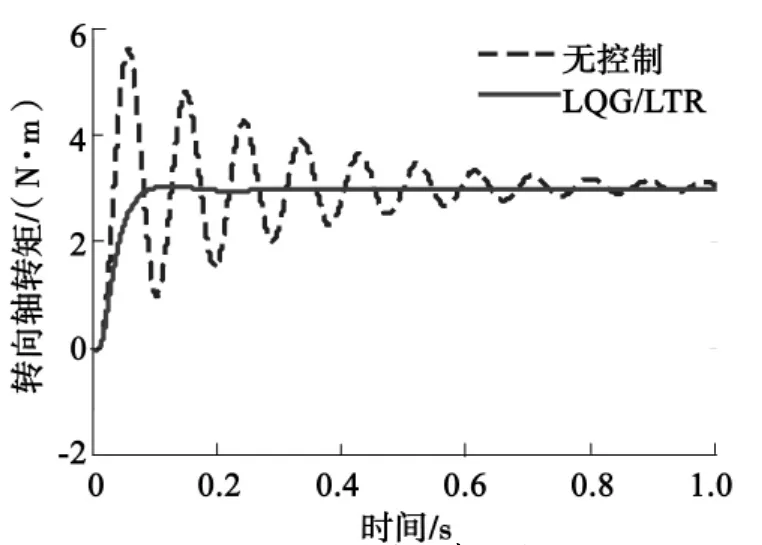
图8转向轴测量噪声的阶跃响应
4 结论
1)基于CarSim/Simulink联合仿真软件平台所建立的EPS仿真模型,能有效协调转向轻便性与路感关系的矛盾。2)针对电动助力转向系统中存在的路面随机干扰与传感器噪声,设计的LQG/LTR控制器能够较好地抑制路面随机信号和传感器噪声对系统的干扰作用,保证系统具有较好的稳定性。
参考文献:
[1]林逸,施国标,邹常丰,等.电动助力转向助力控制策略的研究[J].汽车技术,2003( 3) : 8-11.
[2]BADAWY Aly,ZURASKI Jeff,FARHAD Bolourchi,et al.Modeling and analysis of an electric power steering system[C].Detroit: SAE Paper,1999.
[3]范璐,周兵.低附着路面电动助力转向系统助力控制研究[J].汽车工程,2014,36( 7) : 862-866.
[4]赵治国,余卓平,孙泽昌,等.电动助力转向系统H_∞鲁棒控制研究[J].汽车工程,2005,26( 6) : 730-735.
[5]王启瑞,陈无畏,黄森仁,等.汽车电动转向系统的H∞控制研究[J].汽车工程,2004,26( 5) : 609-612.
[6]赵树恩,李玉玲,刘文文.融合主动转向功能的电动助力转向系统H_∞控制[J].机械科学与技术,2014,33( 8) : 1233-1237.
[7]胡爱军,施国标,林逸.电动助力转向系统LQG/LTR控制[J].农业机械学报,2009,40( 5) : 12-15.
[8]高士香.汽车电动助力转向系统LQG最优控制研究[D].淄博:山东理工大学,2009.
[9]赵万忠,李怿骏,于蕾艳,等.融合助力转向功能的新型主动转向系统LQG控制策略[J].中国机械工程,2014,25( 3) : 417-421.
[10]石振振.电动助力转向系统控制技术及性能仿真研究[D].长沙:湖南大学,2013.
[11]余志生.汽车理论[M].北京:机械工业出版社,2009.
[12]ULSOY A G,PENG H,AKMAKCI M.Automotive control systems[M].UK: Cambridge University Press,2012.
[13]张志林,蒋德云,冯能莲,等.电动汽车动力性及转向制动的稳定性分析[J].山东交通学院学报,2013,21( 4) : 6-11.
[14]胡寿松,王执铨,胡维礼.最优控制理论与系统[M].2版.北京:科学出版社,2005.
[15]DOYLE J C.Guaranteed margins for LQG regulators[J].IEEE Transaction on Automatic Control,1978,23( 8) : 756-757.
[16]吴麒,王诗宓.自动控制原理(上册)[M].2版.北京:清华大学出版社,2006: 303-307.
[17]ATHANS M.A tutorial on LQG/LTR method[R].Seattle: American Control Conference,1986.
(责任编辑:杨秀红)
Study of Stability Control for Electric Power Steering System Based on LQG/LTR
PAN Yang1,FENG Nenglian1*,WANG Jun2,SHI Shengqi2,CHEN Longke1
( 1.College of Environmental and Energy Engineering,Beijing University of Technology,Beijing 100124,China; 2.School of Technology,Anhui Agricultural University,Hefei 230036,China)
Abstract :In this paper,it is aimed at the possible disturbance and the noise problems caused by the road
random excitation and the torque sensor measurement in the electric power steering system to construct the vehicle dynamic model that consists of the EPS system in the application of the CarSim/Simulink co-simulation software,design the EPS control strategy based on the LQG/LTR and analyze the system stability.The result shows that the EPS system controlled by the LQG/LTR can provide the driver with the steering portability and satisfactory steering feel,improve the system stability and restrain the interfering noise in the system effectively.
Key words:electric power steering; LQG/LTR control; CarSim/Simulink co-simulation
作者简介:潘阳( 1989—),女,河南开封人,硕士研究生,主要研究方向为电动汽车与新能源汽车; *冯能莲( 1962—),男,安徽宣城人,教授,主要研究方向为清洁汽车(电动汽车及LPC汽车)与智能车辆开发.
基金项目:国家自然科学基金项目( 51075010) ;北京市教委科技重点项目( KZ200910005007)
收稿日期:2015-04-30
DOI:10.3969/j.issn.1672-0032.2015.02.001
文章编号:1672-0032( 2015) 02-0001-05
文献标志码:A
中图分类号:U463.4
