一种浮空器压力调节综合控制系统设计
2016-01-11吴有恒,谭百贺
一种浮空器压力调节综合控制系统设计
吴有恒,谭百贺
(中国电子科技集团公司第三十八研究所 浮空平台部, 安徽 合肥 230031)
摘要:针对现有浮空器压力控制系统设计的不足,结合浮空器的使用环境,提出了一种基于双机冗余热备份、嵌入式CPU、高精度实时数据采集与处理的压力调节控制装置解决方案。首先建立了浮空器的压差数学模型;接着,以该模型为基础,进行压力调节控制系统设计,包括多余度压力控制系统设计、仲裁融合应急处理设计、压力自控设计。最后,采用该种设计的系留气球的空中试验结果表明,该压力系统控制能够根据气球所处不同的工作状态,融合传感网络状态信息,自主选择自控程序入口,较好的对气球气囊压力进行了有效调节与控制,保证了气球的安全。
关键词:浮空器;压力控制;双机冗余
收稿日期:2014-07-20
作者简介:吴有恒(1980-),男,湖北武穴人,工程师,主要从事浮空器电讯总体设计工作。
中图分类号:V245.4文献标识码:A
浮空器是指轻于空气的飞行器,包括飞艇和系留气球等。为了获得足够的静浮力来克服自身重量,浮空器一般设计有具有一定体积的气囊并在气囊内充入密度小于环境空气的气体,如氦气等。为了使搭载的任务载荷能升到指定的空中,浮空器的体积要求一般比较庞大。为了保证浮空器气囊膨胀成型、并保持刚度和承载力,浮空器充入各气囊内的气体压力与大地环境大气压力要有一定的超压,而由于囊体材料的强度关系,这种超压不能过大。在飞行的过程中,由于温度、高度等外界因素会在不断的变化,其内部气囊的气体压力以及外部大气压也会随着外界条件的变化而剧烈变化。因此,为了保持囊体外形及飞行器的安全,必须对浮空器的气囊压力进行有效调节与控制,使气囊与外界环境的差压始终控制在一定的范围之内[1]。
压力调节综合控制系统正是为了解决这一问题而提出,其是一个多传感器输入、多执行机构输出的复杂系统[2],在设计时,既要考虑系统运行平台、传感器选型、输入输出接口设计等电性能指标,更重要的是必须考虑安全性设计、可靠性设计等,同时根据浮空器的特点,还要兼顾考虑程序远程下载、功能扩展等多方面因素,其有效可靠运行是浮空器能否正常平稳安全放飞的前提和保障,是浮空器系统中一个十分重要的组成部分。不过,目前常规的设计都是基于功能单一、实时性差、模块化开发不够的硬件开发平台,这种设计,冗余度不够,抗干扰能力不强,长时间工作稳定性不高,难以满足浮空器日益需要精准可靠控制的复杂度要求。本文针对现有浮空器压力调节控制系统设计的不足,在分析了浮空器气囊差压数学模型的基础上,提出了一种基于双机冗余热备份、嵌入式CPU、高精度实时数据采集与处理及模块化设计的压力调节控制解决方案。
1浮空器的差压数学建模
1.1差压分布数学模型
差压即浮空器气囊内外气体的压力之差:
DP=Pin-Pout
(1)
其中,Pin为气囊内部压力,Pout为气囊外部压力,在重力场中,气囊内外气体的压力均随高度变化,则差压的分布也随高度的变化而变化。不考虑气囊本身的重量,气体压力沿囊体高度方向的变化为:
dP=-ρgdh
(2)
式中ρ为气密度,g为重力加速度,h为气囊囊体壁上下高度差,根据完全气体状态方程,(2)式又可以写作:
(3)
式中R为气体常数, T为温度。将(2)或(3)式沿高度方向对气囊内外气体分别积分,再根据(1)式即可求得气囊内的差压分布。
1.2差压-温度数学建模
假设气囊内外的气体温度沿高度方向呈线性分布:
Tin=Tin0-kinh
(4)
Tout=Tout0-kouth
(5)
其中Tin0、Tout0分别为气囊内外气体的温度,kin、kout分别为气囊内外气体的温度梯度。根据(3)式积分可分别求得气囊内外气体的压力分布:
(6)
(7)
其中DP0为气囊底部气体差压,Rin、Rout分别为气囊内外的气体常数。
将(6)、(7)式代入(1)式,得气囊内的差压分布为:
(8)
1.3差压-升空高度数学建模
对于总体积V一定的浮空器,在某一海拔高度处差压的变化会导致气囊内气体质量的变化。浮空器的总质量包括结构设备质量和气囊内的气体质量两部分。
浮空器在升空过程中,主气囊内浮升气体的摩尔量是保持不变的,气体总摩尔量的变化完全由副气囊中的空气来承担,根据气体状态方程,气体的质量变化可写作:
(9)
其中mb为副气囊空气质量,Rb为空气气体常数。
当气囊内气体的差压改变时,浮空器的总重量发生变化,进而将影响到浮空器的升空高度。
浮空器的重浮力平衡关系式为:
(10)
其中ρa、ρb和ρc分别为环境大气、副气囊空气和浮升气体密度,Vc为主气囊浮升气体体积,ms为结构设备质量。
引入完全气体状态方程,并设环境空气与副气囊空气的气体常数一致,浮升气体与副气囊空气的差压一致,可以得到环境大气密度与环境大气压力及气囊超压的关系式:
(11)
其中Ra和Rc分别为环境大气和浮升气体的气体常数,Pa为环境大气压力。
由于ρa与Pa均为海拔高度的函数,对于给定体积、结构质量等参数的浮空器,由(11)式即可求得升空高度与气囊超压的关系。
2压力调节控制系统设计
2.1多余度压力控制系统设计
压力调节设计就是根据外界环境的变化导致的气囊压力变化,适时通过控制各气囊风机、阀门的开关,实现气囊的压力控制,使之始终处于一个合理的差压范围内,保持囊体合适的刚度与强度。根据浮空器的实际工作特点,在任何时候都要确保压力调节控制系统的正常有效工作,因此,其设计重点是需要对各个功能环节进行充分合理的余度设计,对热备份工作的各余度单元进行完善的管理与仲裁,从而实现浮空器压力调节的综合控制。如图1所示,通过嵌入式双冗余热备份计算机进行差压数据的采集、处理、传输及执行机构的工作模式控制。在计算机的DOC中装入实时嵌入式操作系统VxWorks,利用Tornado开发工具,根据压力调节控制装置需要进行编程,并可根据需要随时进行远程动态加载和更新。在现场可编程门阵列FPGA的仲裁下使状态最优的计算机处于工作状态[3]。压力采集单元将采集好的数据按照4~20mA和RS485两种数据形式进行输出,4~20mA经过电流电压转换,再经过高速模数转换芯片转换为数字信号,经输入输出接口单元送到FPGA中的数据单元进行滤波存储;经485接口输出的压力数据通过串口Hub,将串口信号转换为网络信号,直接通过网络,由计算机读取进行软件滤波处理[4]。嵌入式计算机对多通道的压力数据源数据通过对比分析采用置信度高的源信息作为有效处理数据。计算机将采集到的气囊压力数据值与设定的压力控制值进行比较,当压力数值高于设定的压力值时,打开对应的气囊阀门,当压力数值低于设定的压力值时,打开对应的风机,直至气囊压力回到正常设定范围内,关闭风机或阀门[5]。当浮空器遭遇极端恶劣情况,双机都失效时,还可以通过FPGA中的应急自动处理核,通过定制的通信格式,实现对压力数据的采集和下传,接收地面上传指令对执行机构的控制操作。
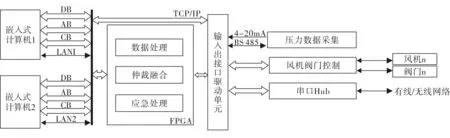
图1压力采集框图
2.2仲裁融合应急处理设计
双机冗余热备份的仲裁融合就是通过对两个测控计算机输入的状态信息进行判断[6]。根据故障状态的优先级进行逐级判定,优先级最高的就是两个计算机的工作状态,其次是主备机读取到的压力数据状态,再次是执行机构驱动控制状态,如果计算机主备机一个出现故障,仲裁单元通过切换装置,选择工作状态正常的计算机,当两计算机都正常工作时,优先选择主计算机;当两计算机意外都出现严重故障时,仲裁与融合单元立即切换到FPGA中的应急处理核,通过应急处理核中双口RAM中存储好的压力参数,按照预先编定的串行通信格式打包,再通过串口转网络的串口Hub,以网络数据包快速下传;同时地面控制指令也以编定好的格式上传到应急处理核中,应急处理核通过解读上传指令,再通过控制模块驱动相应的执行机构继电器,实现对风机、阀门的开关动作,使囊体压力始终处于可控之中,处理流程如下图2所示。
2.3压力自控设计
根据浮空器的工作特点,浮空器充气组装完成后,压力调节系统就必须处于工作状态,自控功能的稳定性与完善性直接影响到浮空器的使用与安全。调节系统的控制方法不是很复杂,从广义上来说,可以说是PID控制,通过比较气囊压差与设定值的关系来实现在不同区间浮空器压力的控制,具体算法不再赘述。其实现主要通过压力自控系统中的双嵌入式计算机中的自控软件来保证。计算机首先融合浮空器传感器网络及执行机构状态信息,综合分析判断系统工作状态,当气囊过压或执行机构故障,判断为何种故障,并直接启动系统报警装置。同时,根据浮空器的地面系留、收放速度、空中停泊不同工作状态,自主适应选择不同压力调节自控程序入口,在进入各工作状态后,根据不同空速,再次自主适应不同压力自控程序入口,实现对囊体压力外形保持及升力浮力调节的准确控制。
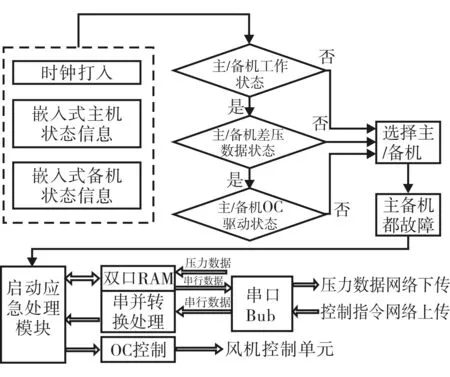
图2 应急处理流程图
3试验验证
图3为某空中试验系留气球在海拔高度为500米任务点自主执行任务过程中高度、温度、气囊差压的对比曲线。整个飞行过程由压力调节综合控制系统进行自主控制,无人工干预。该压力系统控制根据气球所处不同的工作状态,融合传感网络状态信息,自主选择自控程序入口,较好的对气球气囊压力进行了有效调节与控制,保证了气球的安全,图3(c)与所示实际控制效果与所设置的控制区间吻合。
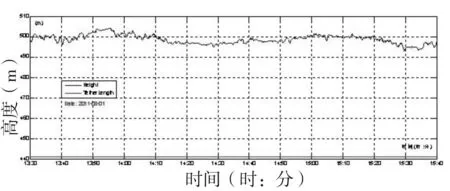
(a)飞行高度曲线
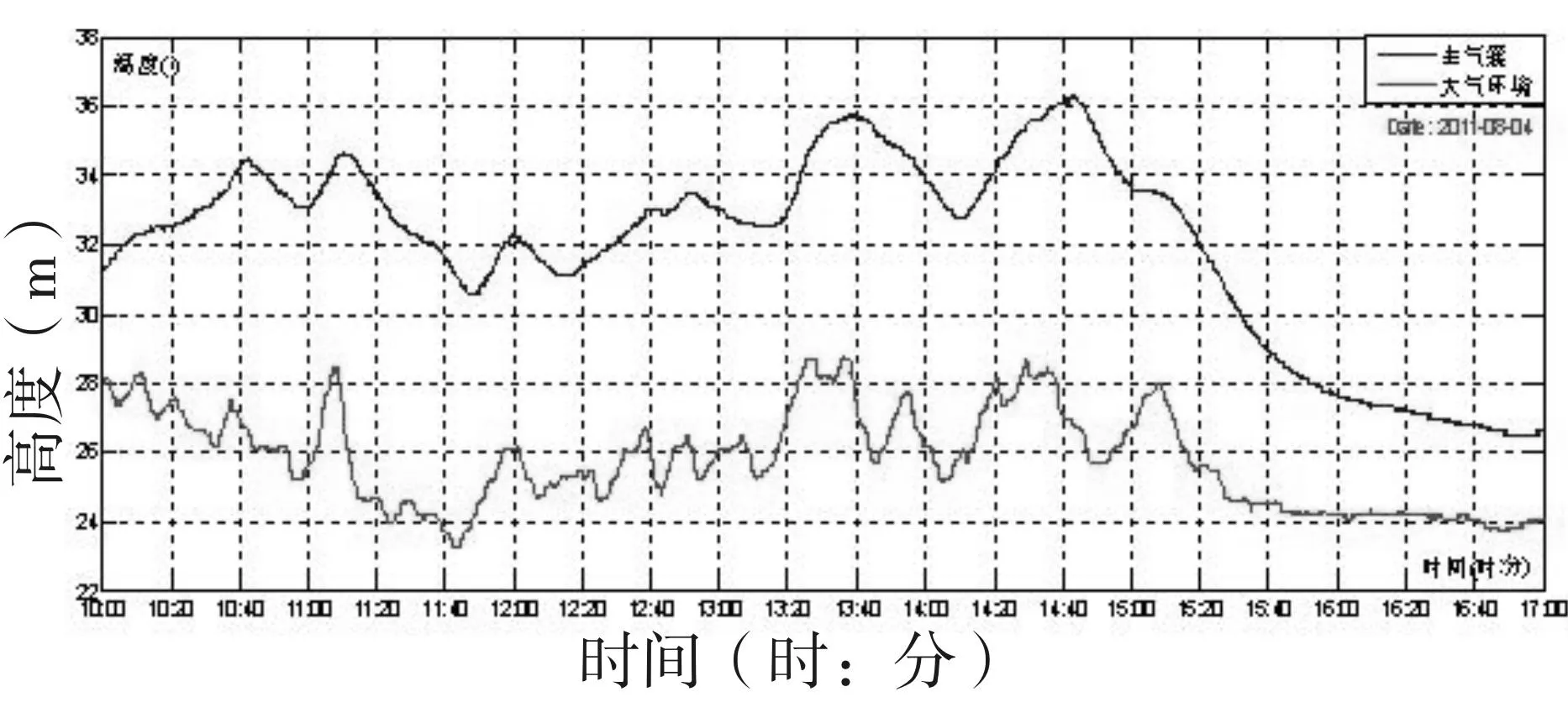
(b)滞空所处环境温度曲线

(c)气囊差压曲线
4结语
压力调节控制是浮空器系统中的一个十分重要的功能,关系到浮空器的性能和安全。本文提出的浮空器囊体外形保持及升力浮力调节的控制工程实现方法通过实际空中试验,可以看出能很好解决浮空器长时间工作,压力调节控制装置高可靠稳定运行的工程难题。
参考文献
[1] 李楷,李红刚.浮空飞行器压力调节控制系统工程研究[J].工程设计学报,2009,16(5):344-347.
[2] 钟华飞,屈卫东.飞艇压力控制系统的算法设计与仿真[J].微计算机信息,2008,24(12):3-5.
[3] 郭林,张涛,宋靖雁,等.基于FPGA 的双机容错仲裁器研究与设计[J].微计算机信息,2010,26(14):113-115.
[4] 李家星.传感器数据并行实时采集监控系统的设计[J].微计算机信息,2010,26(13):101-103.
[5] 段晓超,谭剑波.系留气球压力调节系统的建模和设计[J].现代电子技术,2009 (11): 110-112.
[6] 刘勇,夏佩伦,张亦楠.舰艇控制系统中多机冗余的实现方法技术分析[J].微计算机信息,2010, 26(28):65-67.
[责任编辑、校对:周千]
Design of Pressure Integrated Control System of an Aerostat
WUYou-heng,TANBai-he
(No.38 Research Institute of CETC, Hefei 230031,China)
Abstract:To solve the problems in the existing pressure control system of aerostat, the corresponding pressure control solution is put forward in consideration of the analysis of mathematical model about the air bag super pressure effects due to the variations of height and temperature based on dual-computer hot redundancy, embedded CPU, high-precision real-time data collecting and processing, as well as the operation environment of the aerostat. Firstly the difference model is built. Then based on the model, the pressure integrated system is designed, including the design of redundancy pressure integrated control system, the design of arbitrate amalgamation lash-up operation and the design of pressure auto-control. Lastly, the results of aerostat air test which utilize this design show that the pressure integrated control system could introject the status messages of sensor net, auto choose the entrance of auto control program according to the different operation status, and the pressure of aerostat cell is adjusted and controlled effectively which assure the safety of aerostat.
Key words:aerostat;pressure control;dual-computer redundancy
