高速自旋目标ISAR成像的代数重构方法∗
2016-01-10
(北京跟踪与通信技术研究所,北京100094)
0 引言
逆合成孔径成像雷达(ISAR)成像是雷达目标识别的主要手段之一,通过这项技术获得的高分辨图像是判断目标结构的重要依据。但真实的空间目标在运动中常常存在自旋等微动现象,这种现象会对雷达回波产生多普勒频率展宽和距离单元徙动等调制作用。因此,距离多普勒算法(RD)和距离瞬时多普勒算法(RID)等常规ISAR成像方法不仅不能实现对目标的聚焦成像,同时还会在图像中产生沿方位向的微多普勒干扰带,掩盖了图像中的其他信息。许多情况下,为保证成像质量而采用的分离微多普勒信号的做法会导致小尺寸微动目标重要信息的丢失。因此,如何有效地处理雷达回波中的微动信息,是雷达成像技术应用在空间目标探测中亟需解决的一个难题。
微动是指目标或目标上的独立结构存在的振动、自旋、进动等物理现象[1-2],这种现象对平动的多普勒频率产生的调制作用称之为微多普勒效应。通常,微多普勒效应会对雷达回波信号的分析造成干扰。但是另一方面,目标的微动信息又能成为目标识别和分类的重要依据,因此,近年来针对微动目标的雷达信号处理技术受到了极大关注。美国海军实验室的Chen首先系统地提出了微动的概念并详细分析了由微动造成的雷达回波中的微多普勒效应[3];其后Suresh和Thayaparan等人提出了基于时频分析技术的微动周期的估计方法[4];针对微动现象对ISAR成像造成的不良影响,国防科技大学的刘进等人提出用Hough变换的方法去除微多普勒效应以提高成像质量[5];2011年,西安电子科技大学的白雪茹等提出了针对自旋目标成像的实数逆Radon变换法(RIRT)和复数逆Radon变换法(CIRT)[6],并应用于实测数据得到了AN-26运输机的螺旋桨图。
逆Radon变换原是医学CT成像中的一类方法[7],运算速度快,但是对数据完备性和信噪比要求较高。代数重构方法是CT成像中的另一类方法,具有抗稀疏性和抗噪性强的优点[8]。本文中根据宽带雷达回波在距离慢时间域上的表达式和微动中的自旋模型,将代数重构算法推广到ISAR成像领域,提出了广义代数重构算法(Generalized Algebraic Reconstruction Technique,GART)。GART主要包括建立线性方程组和迭代求解两个步骤。针对不同的应用场景,根据是否考虑回波相位信息又可以分为实数GART和复数GART两种形式。GART具有对模型参数敏感的特点,结合时频分析技术可以用来对自旋周期进行精确估计。本文用仿真和实测数据验证了GART的性能,获得了用常规ISAR成像方法无法得到的目标精细结构,并且提高了目标自旋周期的估计精度。
1 信号模型
在ISAR雷达成像中,微动现象对雷达脉冲回波的调制作用在距离慢时间域上表现为两个方面:距离向上距离单元的徙动和方位向上多普勒频率的展宽。为了建立关于目标图像的线性方程组,首先要对这些调制作用进行详细分析。
设宽带雷达发射线性调频体制(LFM)的信号,表达式如下:

式中,Tp表示脉冲宽度,f0表示中心频率,K表示调频率。
图1所示是自旋目标和雷达的位置关系示意图,图中点O是目标的旋转中心,旋转的角速度为w,点A是目标上的一个旋转半径为r0的散射点,且r0远小于目标到雷达的距离R0。

图1 自旋目标示意图
按照文献[8]中的推导步骤,自旋目标的雷达回波经过去调频接收和脉冲压缩后,信号在距离慢时间域上的表达式为

式(2)所表示的即为高分辨距离像(HRRP)序列,对于每一个慢时间的HRRP,它的实包络为sinc函数,且对应的极大值点位于:

因此,散射点A对应的距离像上的点随慢时间在各个距离单元之间移动。
在方位向上,点A的多普勒相位表现为一个随时间变化的函数:

式(4)即为文献[3]中提到的微多普勒效应,它导致了多普勒频率的展宽,从而造成图像中的散焦现象。
2 广义代数重构算法(GART)
代数重构算法是医学CT成像中的一种经典算法,其主要思想是利用X射线从不同角度穿过物体后的衰减率建立方程组,从而求解出物体中各点的透射率。但是在雷达领域,无线电波衰减率的稳定程度不足以用于建立方程,因此,本文中以高分辨距离像代替衰减率作为方程的常数项。
如图2(a)所示,图像矩阵表示为Psquare(N×N),设旋转中心位于Psquare(N×N)的中心,按照图2(b)所示,将Psquare(N×N)拉直为一个向量:

假设散射点A在Psquare上的坐标为(m,n),根据式(3)可知,经过tm时间的旋转,A点在距离像上对应的极值点位于如果距离向在快时间上的采样点数为M,则点A对应的距离单元序号为
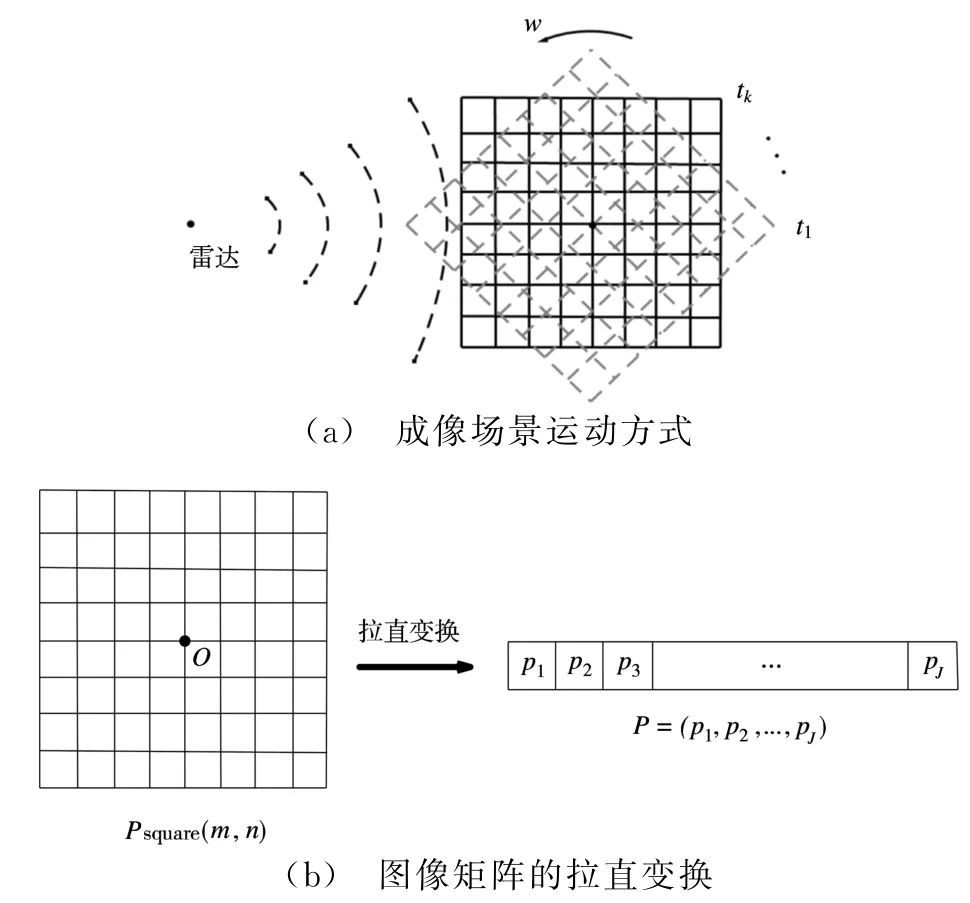
图2 GART算法原理示意图

式(3)和式(4)分别代表了回波在慢时间距离域上所包含的实包络和相位两部分信息,根据是否考虑相位信息,本文中将GART算法分为实数GART和复数GART。
2.1 实数广义代数重构算法
在不考虑相位的情况下,采用如下的方式对M行N2列的系数矩阵W(tslow)赋值。
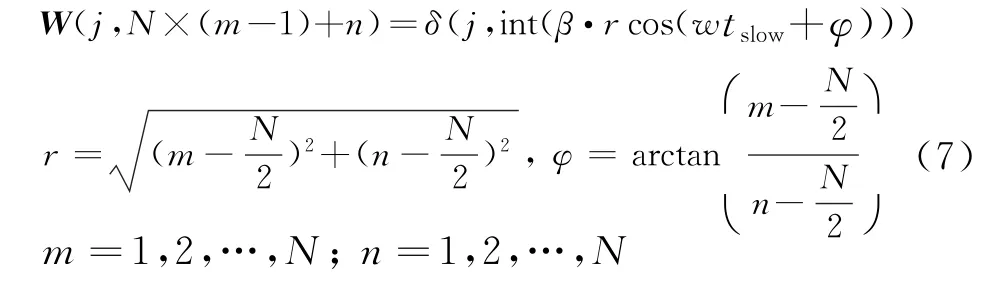
式中,δ为狄拉克函数:

从而,在距离慢时间域上建立了线性方程组:

式中,Y(tslow)表示tslow时刻的距离像,由于慢时间tslow取离散值t1,t2,…,t k,…,因此W(t k)和Y(t k)可以用W k和Y k表示。
求解图像向量P的方式有很多种,大量的有关CT成像的文献对ART方法的求解进行了深入研究,其目的是提高图像重构的质量和速度[8]。本文给出一种基于Kaczmarz迭代格式的序贯模块迭代求解方法(Sequential Modular Iterative,SMI)。
设P k-1是t k-1时刻得到的图像向量,它在距离慢时间域上的残差可以表示为

通过W k的广义逆(W k)-1将该残差投影到图像域上:

最终得到序贯模块迭代格式:

式中,λ为松弛因子,用于控制收敛速度。
2.2 复数广义代数重构算法
实数GART方法只利用了回波在距离慢时间域上的模值部分,它的相位中同样包含自旋目标的结构信息,如果加以利用,理论上就能提高图像的质量。因此,本文对实数GART算法加以修改,得到复数GART。
首先去掉式(9)中的绝对值,保留方程中的线性项的相位信息,同时需要对系数W ip进行如下修正:
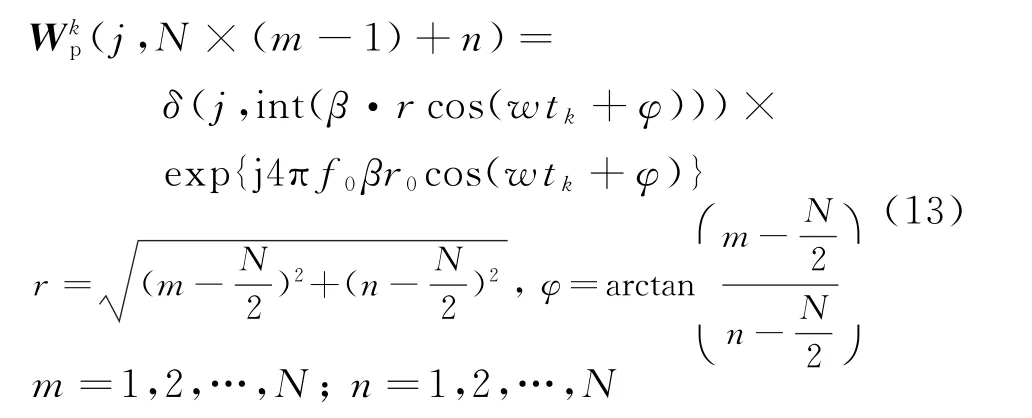
最终得到方程:

通过上述改进,Y k中散射点A对应的相位就会与系数矩阵W kp中的相位相互抵消,从而实现对点A的等相位积累;同时,杂波的相位因为不符合上述模型,故不能实现相干积累。因此,复数GART具有比实数GART更高的分辨率和抗噪能力。
需要说明的是,由于ISAR中雷达信号的载频较高,所以相邻两点间的相位差较大。比如f0=10 GHz,Tp=100μs,距离像采样点数为1 024的条件下,相邻两点的相位差为0.8π。这种条件下,仅一个点的位置偏差就会导致复数GART算法的失效。
插值是解决该问题的有效途径之一,通过插值可以降低相邻两点间的相位差,但是却以计算量成平方倍增长为代价。例如,需要进行80倍插值才能在上述条件下使相邻相位差小于0.01π,计算量增加6 400倍。因此,其计算量限制了复数GART不适用于对大目标大场景的成像处理。
实数GART和复数GART算法虽然有所差异,但是都处于GART方法的框架之内,基本流程相同,可以用图3表示。

图3 GART的算法流程图
如式(7)和式(13)所示,在建立方程时需要利用自旋周期的估计值,当估计值越接近真实值时,成像质量越好。根据此特性,GART算法可以用于对自旋周期的粗估计值进行修正,其步骤如下:
步骤1:利用时频分析技术得到自旋周期的粗估计值T;
步骤2:在T附近的一个区间内进行遍历成像;
步骤3:计算每幅图像的质量指标,如对比度、熵、像素最大值等;
步骤4:综合分析图像质量,最佳质量图像对应的周期最接近真实自旋周期。
3 仿真与应用
3.1 仿真验证
假设雷达中心频率为10 GHz,带宽为600 MHz,脉冲重复频率为100 Hz,接收信噪比为10 dB,成像场景距雷达10 km。目标上存在4个散射点,坐标分别为(9,0),(-9,0),(0,6),(0,-6)且关于场景中心O以w=4πrad/s的速度旋转。由于成像场景较大,采用实数GART算法即可,成像结果如图4所示。
其他条件不变,重新设定散射点坐标为(0.3,0),(-0.3,0),(0,0.2),使得场景缩小30倍,且不再旋转对称。用实数GART和复数GART分别成像,其结果如图5和表1所示。可见在添加相位信息之后图像的质量和分辨率都有了极大提高,但是运算量也明显增加。
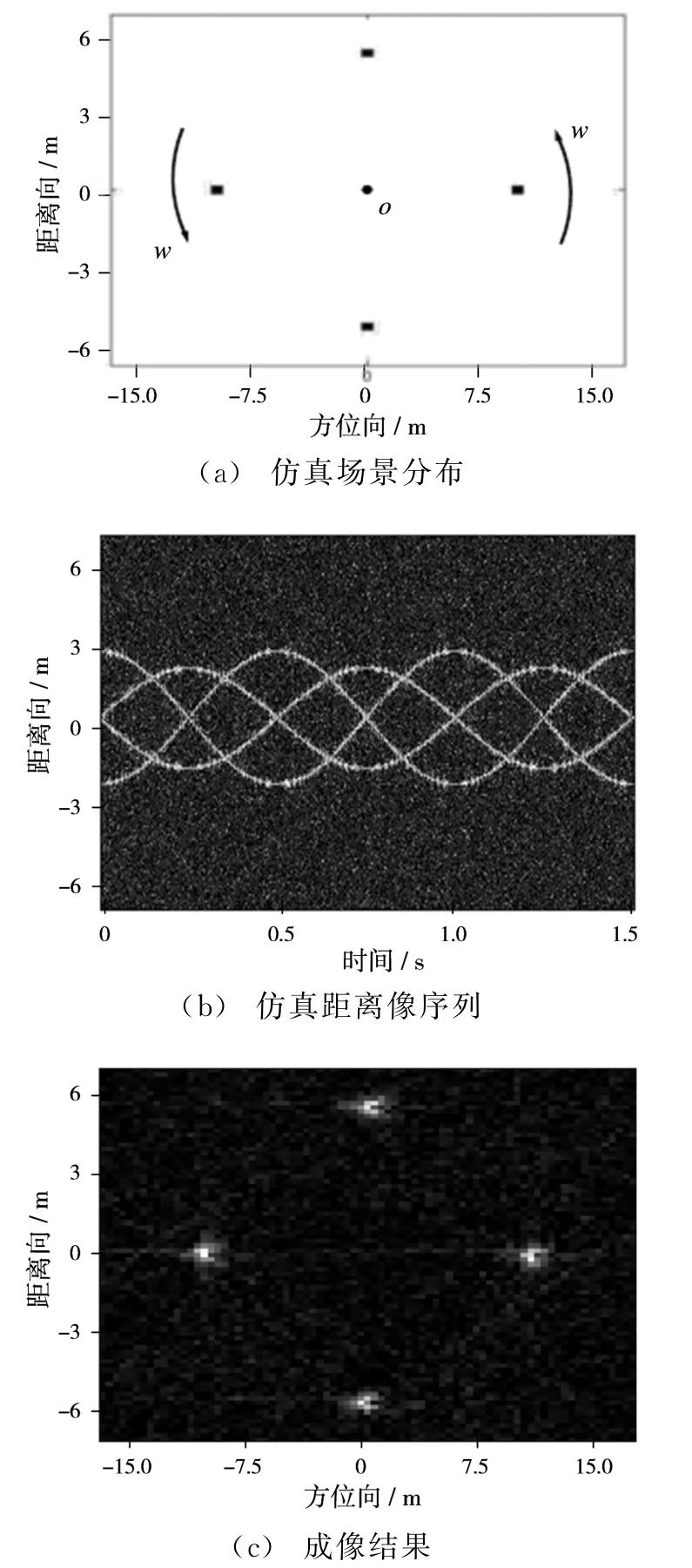
图4 实数GART成像结果
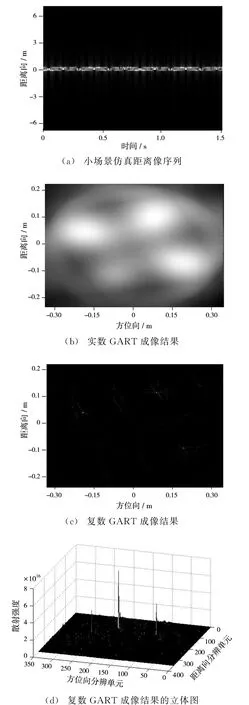
图5 小场景成像结果
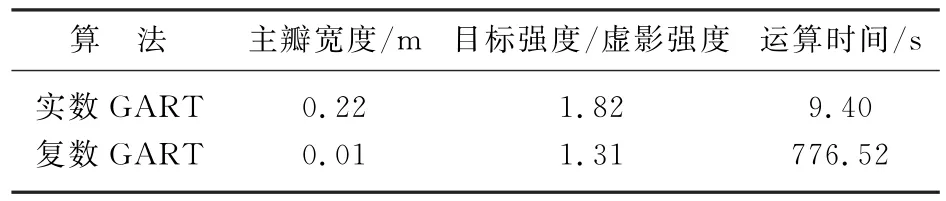
表1 小场景条件下算法性能比较
3.2 飞机实测数据处理
第一段实测数据是AN-26运输机的宽带回波信号,AN-26的两个机翼上各有一个4叶螺旋桨,直径约为3 m,雷达的距离像分辨率为0.375 m,因此该螺旋桨属于大目标,可以用实数GART对其进行处理,结果如图6所示。
图6(a)是距离多普勒算法成像结果,图中有两条明显的方位向干扰带,这是螺旋桨的自旋造成的微多普勒效应。采用Chirplet方法将高频的运动信息从原信号中分离[9-10],并对其中的距离单元进行时频分析得到时频分布(图6(b)),可以粗略估计出自旋周期约为0.045 s,再用2.3节中的方法进行精修正,从成像的熵曲线(图6(c))和对比度曲线(图6(d))得出自旋频率为0.0475 s,用同样的方法可以估计出另一个螺旋桨的自旋频率为0.047 7 s。该飞机两个螺旋桨的成像结果如图7所示。从图中可以清晰地看出,飞机发动机的螺旋桨是四页片结构的,这将为目标识别提供更多有用的信息。
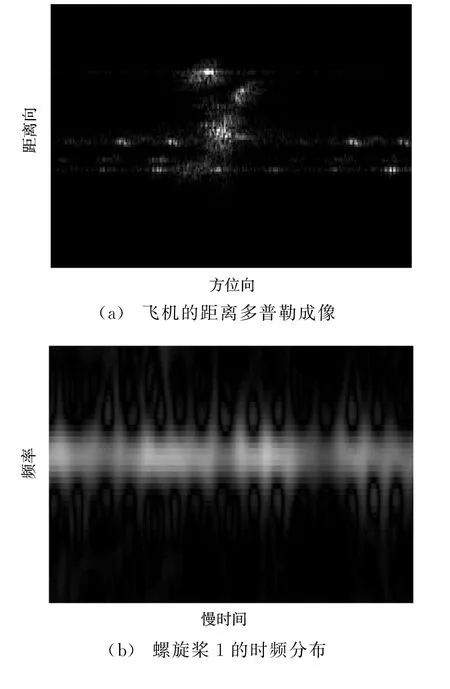
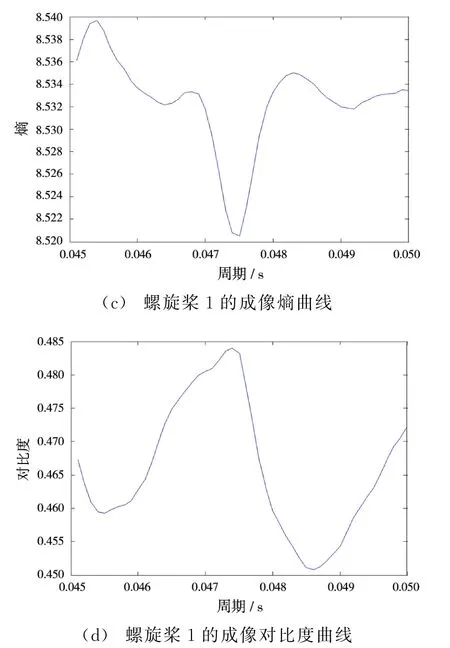
图6 AN-26运输机成像结果及螺旋桨旋转频率分析
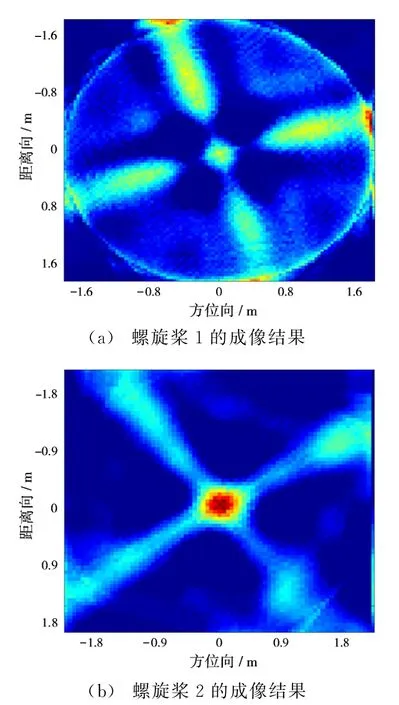
图7 AN-26运输机螺旋桨成像结果
4 结束语
本文提出了针对自旋目标宽带成像的GRAT算法框架,在这个框架下给出了只考虑模值的实数GART算法和增加了相位信息的复数GART算法。其中实数GART算法运算速度快,适用于螺旋桨等较大的目标,而复数GART则具有分辨率高、抗噪性强的特点,可以用于微小自旋目标的成像。仿真和实测数据表明,GART是一种有效的自旋目标成像方法,可以用于目标结构的估计和自旋周期的精确修正。
GART算法提供的代数方法框架,有着广泛的工程应用前景。一方面,通过GART算法可以获得高速自旋目标的结构细节,为目标识别提供更多依据;另一方面,代数方法比解方法更容易与EM算法、OS算法、压缩感知等现代计算方法相结合,以提高图像重构的质量和效率。
[1]李星星,姚汉英,孙文峰,等.时间-距离像消隐情况下弹道目标平动补偿[J].雷达科学与技术,2014,12(2):195-205.LI Xingxing,YAO Hanying,SUN Wenfeng,et al.Translational Motion Compensation of Ballistic Target in the Case of Time-Range Profile Blanking[J].Radar Science and Technology,2014,12(2):195-205.(in Chinese)
[2]张豪,李松,罗迎,等.弹道目标进动频率精确提取方法研究[J].计算机仿真,2015,32(8):22-26.
[3]CHEN V C.Advances in Applications of Radar Micro-Doppler Signatures[C]∥2014 IEEE Conference on Antenna Measurements&Applications(CAMA),Antibes Juan-Les-Pins:IEEE,2014:1-4.
[4]SURESH P,THAYAPARAN T,OBULESU T,et al.Extracting Micro-Doppler Radar Signatures from Rotating Targets Using Fourier-Bessel Transform and Time-Frequency Analysis[J].IEEE Trans on Geoscience and Remote Sensing,2014,52(6):3204-3210.
[5]刘进.微动目标雷达信号参数估计与物理特征提取[D].长沙:国防科学技术大学,2010.
[6]BAI X R,ZHOU F,XING M D,et al.High Resolution ISAR Imaging of Targets with Rotating Parts[J].IEEE Trans on Aerospace and Electronic Systems,2011,47(4):2530-2543.
[7]ANDERSEN A H.Algebraic Reconstruction in CT from Limited Views[J].IEEE Trans on Medical Imaging,1989,8(1):50-55.
[8]WANG G,JIANG M.Ordered-Subset Simultaneous Algebraic Reconstruction Techniques(OS-SART)[J].Journal of X-Ray Science and Technology,2004,12(3):169-177.
[9]LI J,LING H.Application of Adaptive Chirplet Representation for ISAR Feature Extraction from Targets with Rotating Parts[J].IEE Proceedings-Radar,Sonar and Navigation,2003,150(4):284-291.
[10]蔡洪,杨宁国,宋宏伟,等.自适应Chirplet信号分解用于ISAR目标三维转动检测[J].光电工程,2013,40(1):1-9.
