基于极化特征的雷达目标识别技术∗
2016-01-10宋新景
宋新景
(1.中国电子科技集团公司第三十八研究所,安徽合肥230088;2.孔径阵列与空间探测安徽省重点实验室,安徽合肥230088;3.智能情报处理重点实验室,安徽合肥230088)
0 引言
雷达作为重要的电子信息设备,自诞生起就在战争中发挥了极其重要的作用。但随着进攻武器装备的发展,只具有探测和跟踪功能的雷达已经不能满足信息化战争的需要,迫切要求雷达不仅要具有探测和跟踪功能,而且还要具有目标识别功能。雷达目标识别在防空预警系统、海情监控系统、弹道导弹防御系统等技术领域发挥出了很大威力。
雷达目标识别的基本原理是利用目标在雷达远区所产生散射场的特征,获得用于目标识别的信息,包括回波信号的幅度、相位、频谱和极化等目标特征信息。对获取的目标信息进行特征提取,与已知目标的特性进行比较,从而达到目标识别的目的。
雷达回波的极化特征是继幅度、相位和多普勒频移之后的另一个重要特征。雷达目标在受到电磁波的辐射时,其散射的电磁波的极化状态,一般都不再与入射的电磁波的极化状态相同,因而雷达目标起着一个极化变换器的作用,且这种作用由目标的形状、结构和材料决定任何目标都有其特定的极化变换作用,故可以利用目标回波中的极化现象来识别目标。
1 基于极化特征的目标识别方法
1.1 国内外研究现状
从公开文献上看,当前国内外研究得比较多的是极化SAR图像目标识别,主要用于遥感等,取得了较成功的研究。目前国内具有极化能力的雷达较少,主要是成本较高,但随着科技的发展以及工艺的改进,相信具有全极化测量能力的极化雷达会得到进一步的应用。
1.2 极化特征识别研究方法概述
极化特征是与目标形状本质有密切联系的特征,目标的形状、尺寸、结构和取向决定了对照射电磁波的极化变换作用。
利用极化信息进行雷达目标识别的方法[1],主要分为:
1)根据极化散射矩阵来识别目标是利用极化信息识别目标的基本方法;
2)根据从目标极化散射矩阵中导出的目标极化参数集来识别目标;
3)根据目标的最佳极化或极化叉来识别目标;
4)对高分辨雷达,通过极化重构与已知目标数据库对比获得识别结果;
5)将极化信息与已有的成像识别技术相结合,进行目标识别;
6)将极化信息与冲激响应结合起来,利用目标瞬态极化响应进行目标识别。
1.3 极化散射矩阵
在极化识别方向,极化散射矩阵[2]的概念提出较早,即利用二维复散射矩阵表示特定姿态和辐射源频率下的目标散射特性。
极化特征通常由极化散射矩阵获取。极化散射矩阵表征了目标对极化波的散射特性,与目标的形状、大小、材料、结构、姿态、雷达频率等因素有关,包含了丰富的目标信息。
散射矩阵中的元素通常为复数,表示成一个与雷达散射截面(以功率度量)相关的电场分量,其值取决于收发极化状态、目标的视角以及散射特性。在雷达视角及入射频率一定的条件下,一个目标确定一个散射矩阵,表示形式如下:

式中,Ei和Es分别为入射波和散射波的极化状态。下标“1”和“2”表示一组正交极化分量。第一个下标表示接收天线的极化方式,第二个下标表示发射信号的极化方式。用S1=S11+S22和S2=S11-S22分别表示散射矩阵[S]的迹和反迹。
采用水平线极化和垂直线极化分时发射的形式实现双极化操作,其极化散射矩阵可表示为
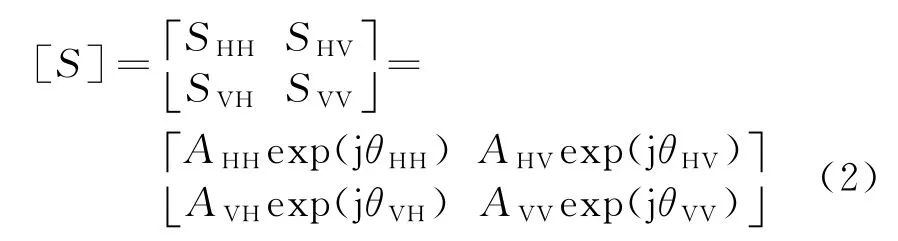
式中,A为回波幅度,θ为回波相位。对于互易性目标,可以近似地认为SHV≈SVH。
极化散射矩阵表征目标在给定取向上的散射特性,与目标的姿态角及收发天线选取的极化基有关。目标姿态坐标系如图1所示。坐标系XYZ的原点O选取在目标的几何中心上,选择Z轴沿雷达视线方向,目标的姿态变化可以分解为绕3个轴的转动。目标绕雷达视线的旋转称为俯仰,用φ度量;绕另两个垂直于视线轴的旋转分别称为横滚和偏航,分别用ρ和η度量。φ,ρ,η统称为欧拉角,任一个欧拉角的改变都会使目标极化散射矩阵随之改变。
对于雷达观测者,极化基的改变或目标绕雷达视线旋转都不增加新的目标极化信息。因此,寻找与目标绕视线旋转和极化基无关的目标特征可消除三维姿态变化中的一维变化。
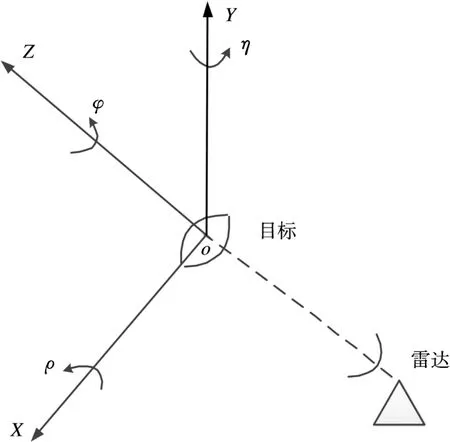
图1 目标姿态的分解
1.4 极化不变量
采用极化不变量[3]表征目标的极化散射特性由Brickel提出,由于该量值不受法拉第旋转(极化平面的旋转)或目标绕视线旋转以及天线极化的某些误差的影响,在目标识别中有着良好的应用。
极化不变量完整地确定了在给定取向下目标的后向散射特性,表征了雷达从视线方向上观察目标所能获得的最大目标信息[4]。
极化不变量不随俯仰角φ和雷达极化基改变,包括散射矩阵行列式的值、功率矩阵的迹、去极化系数、本征极化方向角和本征极化椭圆率,简介如下:
1)散射矩阵行列式的值Δ

目标绕雷达视线旋转或雷达绕目标视线旋转时,散射矩阵行列式的值保持不变。
对于线目标,如金属丝,Δ=0;对各向同性目标,如金属球,Δ=A2(A为一实数);对于对称目标,Δ=S11S22。因此,不变量Δ粗略地反映了目标的粗细或“胖瘦”。
2)功率矩阵的迹P1
格雷夫斯(Graves)定义的功率散射矩阵为

式中,“∗”代表共轭,“T”代表转置。
功率矩阵的迹为绕雷达视线旋转不变的量,代表了一对正交极化天线所接收到的总功率。功率矩阵的迹P1可用散射矩阵的元素表示:

它表征了全极化下的目标RCS值,可大致反映目标回波能量的大小。
3)去极化系数D

S1与P1均为极化不变量,因此去极化系数D亦如此。D大致反映了目标散射中心的数量,对于一些孤立散射中心,D通常小于0.5;较大的值(0.5<D≤1)多对应多个散射中心的组合体目标。
4)本征极化方向角φd

式中,该特征反映了目标的极化方向。
5)本征极化椭圆率τd

总之,5个极化不变量完整地确定了在给定取向下目标的后向散射特性,表明雷达从视线方向观察目标所能获得的最大目标信息,不随目标绕视线旋转或雷达极化基改变而改变。具体地说,无须考虑雷达天线的极化就可以确定Δ,P1,D,φd和τd。Δ和P1大致反映了目标的大小和粗细;去极化系数D表明了目标散射中心的数量;而本征极化椭圆率τd是表征目标的对称性的一个物理量;本征极化方向角φd指示出雷达天线与本征极化椭圆轴之间的相对取向,表征了目标特定的俯仰姿态。
五维极化不变量中,本征极化方向角和本征极化椭圆率与散射矩阵的本征问题相关[5]。本征极化为能使输出与输入相一致的输入极化,此时对应的散射矩阵称为目标本征极化散射矩阵[S]d,表示如下:

式中,λ1和λ2为本征值,可实现散射矩阵的对角线化形式。任何目标均具有本征极化方向角和本征极化椭圆率。当发射极化与目标本征极化相匹配时,目标回波极化的方向与发射极化方向一致或相差π。目标RCS的极大极小值分别对应于λ1和λ2。由于本征值不随目标绕雷达视线旋转或极化基的改变而改变,因此,本征极化方向角φd和本征极化椭圆率τd同样具有极化不变性。
2 仿真试验
本文采用电磁散射计算仿真数据进行分析,图2给出了本文电磁散射计算所用的3种目标的网格化结构模型,极化方式采用线极化H H,VV,HV,VH极化。
本节仿真利用的3个飞机目标的电磁模型尺寸信息如表1所示。其中,MTA为多用途大型运输机,Drone为无人机,L15为高级教练机。
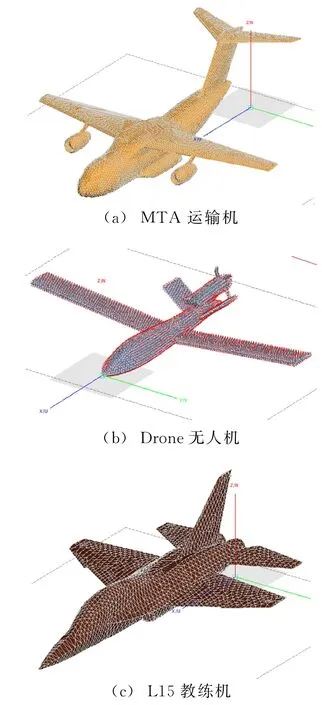
图2 极化分析飞机电磁模型
表1 3种机型的尺寸信息
利用电磁仿真软件Feko Suite 6.0产生已知目标电磁模型的回波数据。频率为50~75 MHz,频率步进为1 MHz;方位角为0~180°,角度步进为1°,0°对应于鼻锥,180°对应于机尾。极化方式设置为水平、垂直线极化;选择远区观察点,计算单站RCS;默认网格划分;采用多层快速多极子算法迭代产生目标的回波数据。
3 特征提取与识别
3.1 特征提取与分析
依据电磁计算仿真数据提取极化散射矩阵,并进而提取极化不变量特征,图3、图4分别给出3个飞机目标在方位角为0°和90°下的极化不变量特征,行列式的值Δ、功率矩阵的迹P1、去极化系数D、本征极化方向角φd、本征极化椭圆率τd。
由图3(a)、(b)和图4(a)、(b)可知,Δ和P1特征除了量值的不同,其量值的变化趋势是一致的。在90°方位下,MTA运输机的Δ和P1远远大于无人机和教练机,与它们的尺寸信息相对应。从图3(c)、图4(c)的D特征,在0°方位下,MTA的去极化系数特征0.6<D≤1,说明飞机目标是多散射中心目标,散射中心个数≥2,而Drone和L15在(0.3,0.6)范围内,小型飞机在0°视线范围只能观测到分散的散射中心。在90°方位下,3个飞机去极化特征都0.6<D≤1,说明散射中心随着方位角是变化的,并没有规律性。
由图3(d)、(e)和图4(d)、(e)可知,3类目标的φd和τd特征也具有较明显的差异,但在实际应用当中,大型极化雷达很难保证极化相位的测量精度,而这两个特征与相位关联较明显,因此本文对于这两个特征不作深入分析,也不作为本文分类识别所用特征。
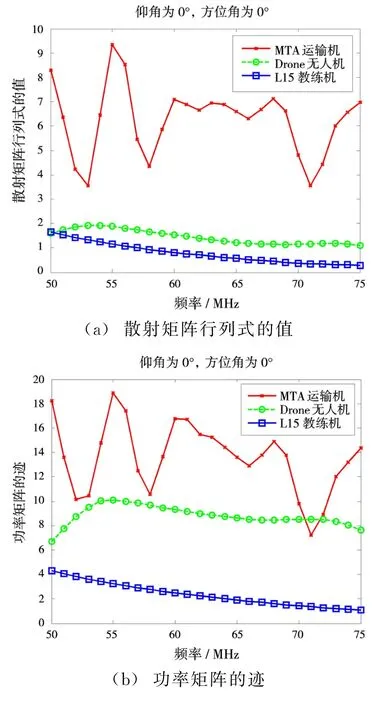
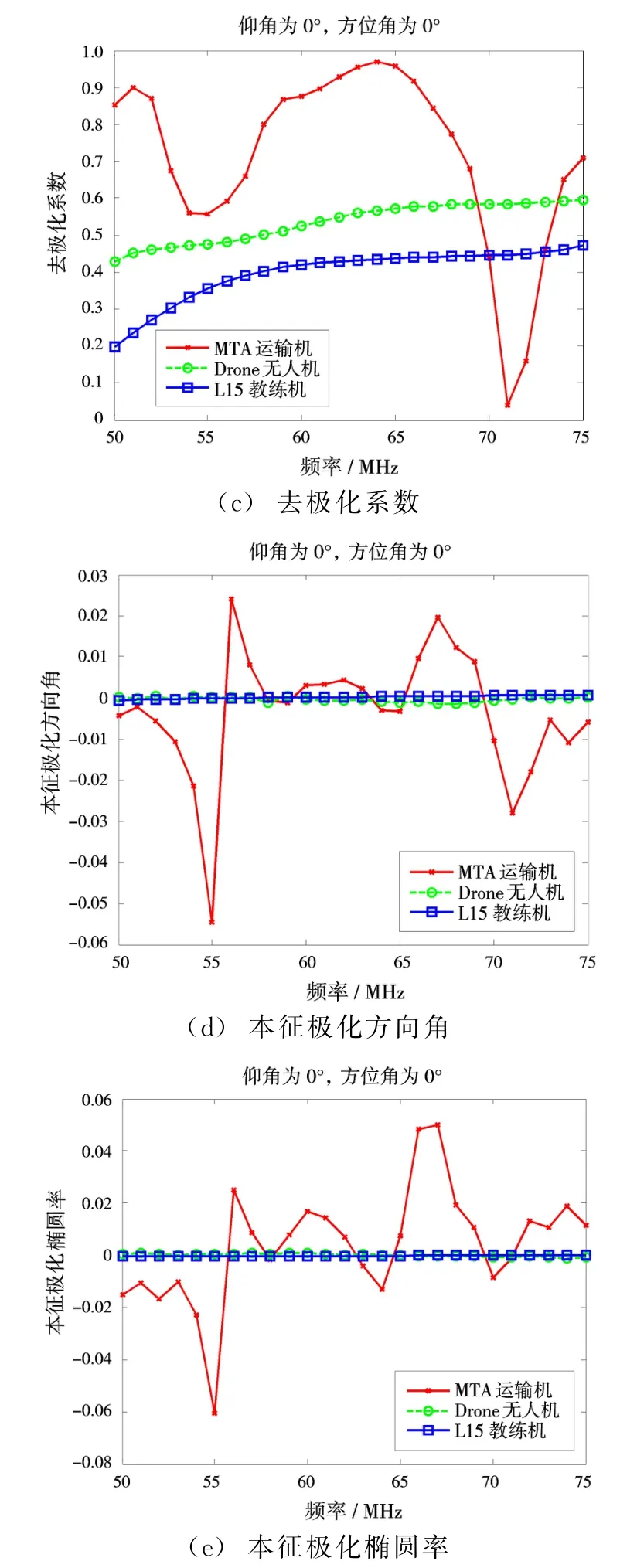
图3 方位角0°时极化不变量的频率分布曲线
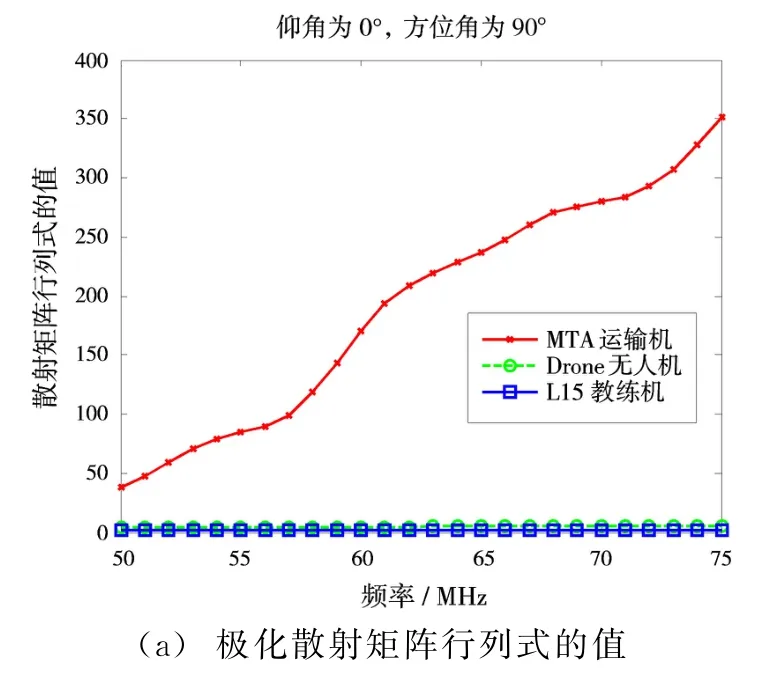
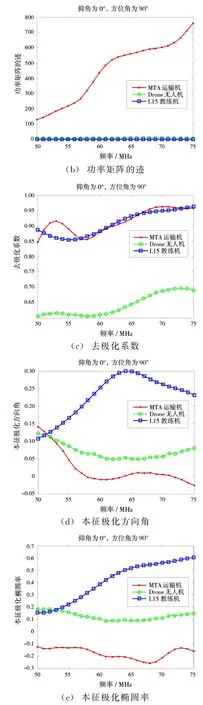
图4 方位角90°时极化不变量的频率分布曲线
3.2 识别结果及分析
图5给出了极化目标分类识别的流程图。根据前面公式可知,φd和τd特征容易受到相位的影响,而大型极化雷达很难保证极化相位测量精度,因此本文提出采用与幅度相关性较大的P1、D进行分类识别,而目标的几何外形特征主要取决于极化的幅度信息。
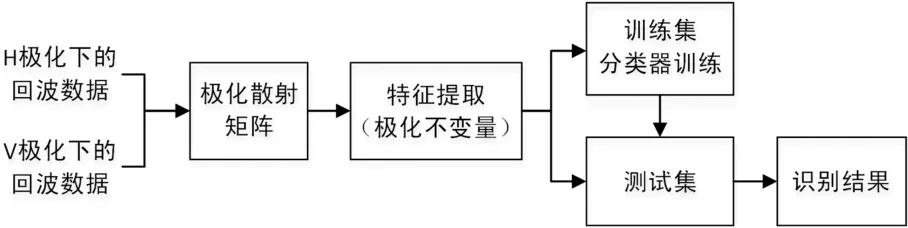
图5 极化目标分类识别流程图
特征提取后进行分类识别,本文采用SVM分类器,SVM分类器的优点泛化能力较强,收敛速度较快,且对小样本训练效果也较好。核函数采用高斯核函数。
由图3(a)、(b)和图4(a)、(b)可知,行列式的值和功率矩阵的迹特征变化较一致,在特征选择时选择一个特征进分类器,这里选取功率矩阵的迹P1,加上去极化系数特征D构成两维特征向量。特征分布二维图如图6所示。
从图6可以看出,在不同方位下,这两类特征不同目标之间的差别较大,具有一定的同类聚合性和异类之间的分离性。通过设计不同分类界面。考虑到在实际识别过程中,目标方位角度的细分,或引起运算速度降低,因此在分类过程,以10°为间隔设计分类器,目标姿态会由于各种因素的干扰而呈现出较随机的变化,因此在特征提取过程中,开了一个3°的方位窗口,在方位窗口内对特征量进行平滑。
在分类识别过程中,对获取的仿真数据,一半数据作为训练集,剩余一半作为测试集。识别结果如表2所示。
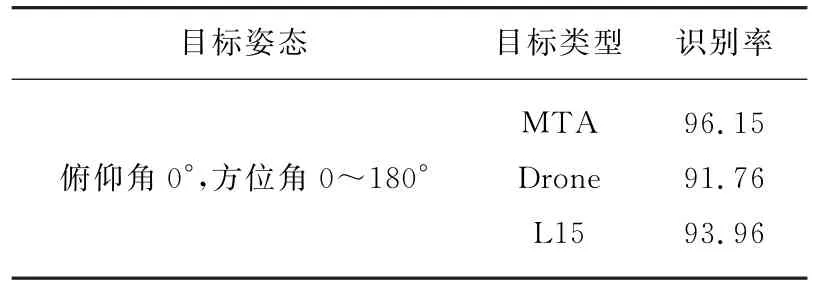
表2 基于P1、D特征的目标分类识别结果
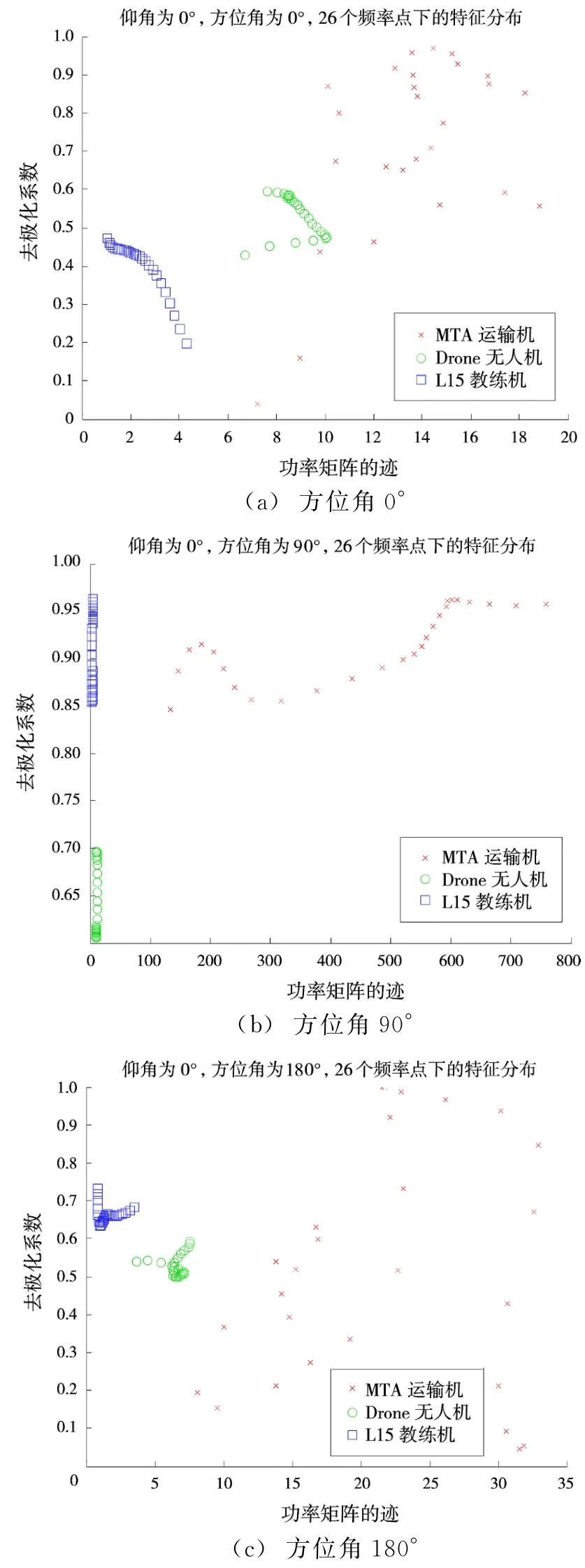
图6 极化特征二维分布图
4 结束语
本文在电磁计算飞机模型仿真数据基础上对极化不变量特征进行提取,利用SVM分类器,对其中两种特征进行分类识别,分类试验结果验证了极化特征的有效性。对于飞机外形存在较大差异的3种飞机,基于功率矩阵的迹和去极化系数有较好的分类识别效果,为区分大中小飞机提供了一种解决方法。
[1]伍光新.谐振区雷达目标特征提取与目标识别研究[D].哈尔滨:哈尔滨工业大学,2008:6-7.
[2]王福友,罗钉,刘宏伟.基于极化不变量特征的雷达目标识别技术[J].雷达科学与技术,2013,11(2):165-172.
[3]闫昆.全极化雷达高分辨距离像目标识别方法研究[D].西安:西安电子科技大学,2013:15-30.
[4]肖顺平,王雪松,庄钊文.基于极化不变量的飞机目标识别[J].红外与毫米波学报,1996,15(6):439-444.
[5]黄培康,殷红成,许小剑.雷达目标特性[M].北京:电子工业出版社,2005:16-18.