基于改进Smith预估补偿及自适应Fuzzy-PID控制的NCS研究
2016-01-08徐星星,张春,何慧云等
基于改进Smith预估补偿及自适应Fuzzy-PID控制的NCS研究
徐星星,张春,何慧云,陈林
(安徽工程大学 电气工程学院, 安徽省检测技术与自动化装置重点实验室, 安徽 芜湖 241000)
[摘要]在具有网络时延和被控对象自身时延的网络控制系统中,针对传统Smith预估补偿器需要被控对象的精确数学模型,对传统Smith预估补偿器进行改进,提出在预估器主反馈通道上加入一阶惯性滤波环节,用于解决被控对象与预估器模型参数失配问题。同时引入自适应Fuzzy-PID控制器作为系统控制策略,设计了系统结构并进行了仿真研究。仿真结果表明改进后的系统能获得更好的动态性能和适应性能。
[关键词]网络时延;Smith预估补偿器;一阶惯性滤波环节;自适应
[文章编号]1673-2944(2015)05-0020-06
[中图分类号]TP273
收稿日期:2015-05-30
基金项目:安徽省自然科学基金资助项目(1208085MF115)
作者简介:徐星星(1990—),女,江苏省宿迁市人,安徽工程大学硕士研究生,主要研究方向为网络控制系统;[通信作者]张春(1972—),男,安徽省安庆市人,安徽工程大学教授,硕士,主要研究方向为网络控制系统及智能控制。
网络控制系统(Networked Control System,NCS)是一种通过共享通信网络来交换空间分布的控制器、估计器、执行器和传感器等多个节点之间信息的分布式闭环控制系统,广泛地应用于工业生产过程中。NCS降低了布线的复杂性,提高了系统的可靠性,增加了系统的可扩展性[1]。但是,由于有网络协议和通信带宽的约束,节点之间必然会存在竞争通信资源的情况,所以信息在传输过程中产生时延就在所难免。然而,存在的时延不仅会降低系统的动态特性,甚至可能导致系统的不可控性。
近年来,国内外学者对网络控制系统时延预估补偿进行了大量的研究,其中,常采用的有Dahlin算法和Smith算法。Dahlin算法是为消除余差,同时对纯滞后进行补偿而设计的合适数字控制器[2]。Smith算法是由Smith O.J.M.提出并被广泛应用于特定的工业场合[3]。虽然如此,Smith算法在控制系统应用中还是有很大的局限性,所以很多学者针对其存在的不足提出了相关改进方案。文献[4]提出一种新型的单神经元Smith预估控制算法。文献[5]采用低阶模型来解决Smith预估模型的不匹配问题,从而能够获得良好的动态响应性。文献[6-8]给出了一种新型的Smith预估模型,并指出在此模型下不需要知道被控对象的精确数学模型,就可以将网络时延从闭环系统中移出,提高系统的稳定性。文献[9]提出了一种基于迭代模型的Smith预估控制系统,指出通过一定次数的“迭代”就可得到精确的预估模型。文献[10]将基于Smith预估器的模糊PID控制系统应用于电加热炉体散热补偿,并验证该系统具有很好的鲁棒性。文献[11]Smith预估补偿算法被应用于Fuzzy-PID控制器的3个参数在线自动整定中。
本文针对传统Smith预估补偿器需要掌握被控对象精确的数学模型,对传统Smith预估补偿器进行改进,用于缓解预估模型不匹配带来的影响,同时引入自适应Fuzzy-PID控制器作为系统控制策略,并分别针对模型完全匹配和模型完全失配情况进行仿真研究。
1问题描述
1.1 传统双Smith预估补偿的NCS
NCS的典型结构如图1所示[2],其中,C(s)是控制器的传递函数,G(s)是被控对象的传递函数,τsc是传感器到控制器的网络传输时延,τca是控制器到执行器的网络传输时延。系统闭环传递函数为
(1)
式中的分母包含时延,而时延将会大大降低网络控制系统的稳定性。
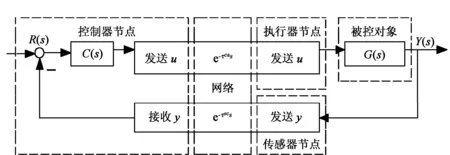
图1 网络控制系统结构图
假设已知包含纯滞后的被控对象为G(s)e-τs,且其预估模型为Gm(s)e-τms ,则基于双Smith预估补偿的NCS如图2所示[7]。系统闭环传递函数为
(2)
当τm=τ,Gm(s)=G(s)时,被控对象预估模型等价于实际模型,式(2)可改写为
(3)
从式(3)可看出,分母中已不包含任何的时延指数项,即在闭环传递函数中所有的时滞因子已被消除。从而可得NCS的等效控制系统,如图3所示。

图2 基于Smith预估器的网络控制系统结构图 图3 等效控制系统结构图

但是,在实际的NCS中,由于大多被控对象都是处在不断的变化过程中,得到被控对象的精确数学模型几乎是不可能的,所以想要建立被控对象的精确数学模型就存在相当的难度,而又要满足被控对象完全匹配的条件就更是难上加难,则上文提到的网络控制系统结构的作用就会大大的减弱,甚至有可能失去其存在的价值。
1.2 改进双 Smith预估补偿的 NCS
为了解决传统的Smith预估补偿器必须知道被控对象的精确数学模型这一问题,本文对传统Smith预估补偿器进行优化,将原来的主反馈通道上的单位1变换成一阶惯性环节,用以将预估系统模型不完全匹配甚至完全不匹配时造成的影响降低到最小。改进的双Smith预估补偿的NCS结构如图4所示。改进的双Smith预估补偿的NCS闭环传递函数为
(4)
当G(s)=Gm(s),τ=τm时,式(4)的特征方程分母中同样不含有时延的指数项,从而时滞不会给控制效果带来任何影响。然而,当G(s)≠Gm(s),且τ≠τm时,1/(tfs+1)相当于一阶惯性的滤波环节,对不匹配的预估器模型起到了一定的缓冲作用,改变了特征方程的根,即使极点位置被改变。如果tf=0,那么图4所示系统结构就与基于传统Smith预估补偿器的网络控制系统结构相同,所以一阶惯性滤波环节能对模型不匹配的情况起到很好的补偿作用。
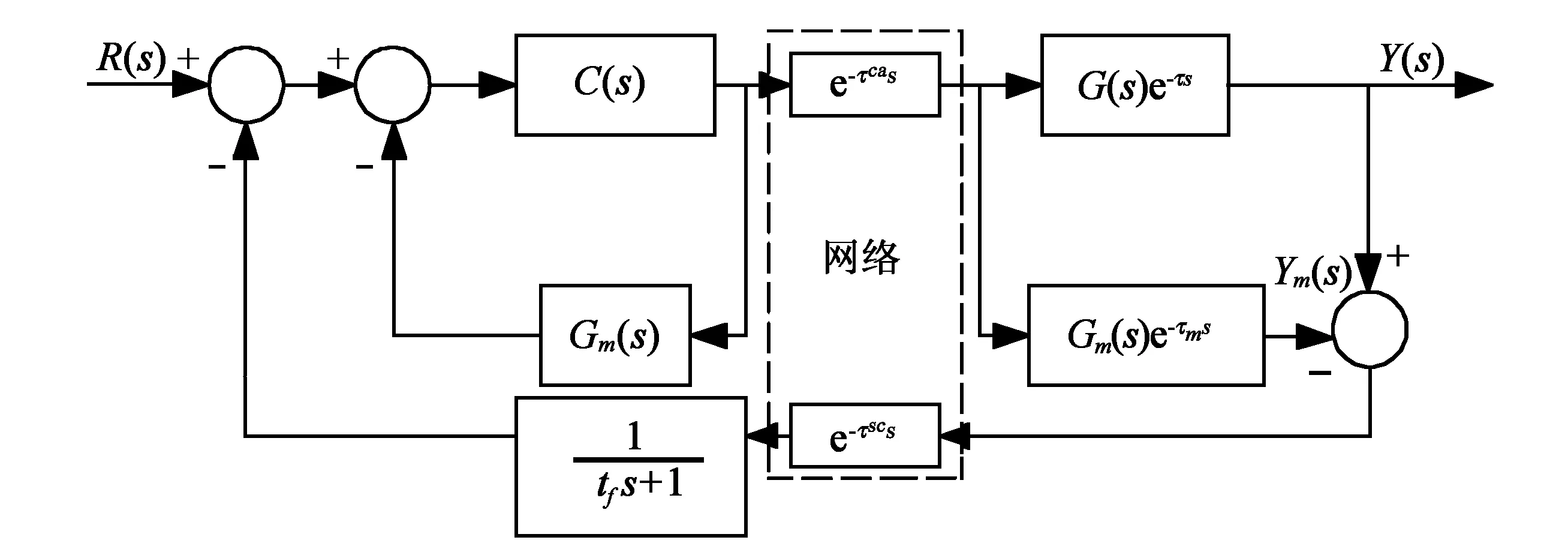
图4 基于改进Smith预估补偿器的网络控制系统结构图
从图4可看出,控制器输出的实际值与预估补偿器输出值的差,经过反馈通道的一阶惯性滤波环节运算后得到的结果作为控制器的输入,将预估模型不匹配所带来的影响减少到最小,提高了NCS的动态响应性和鲁棒性。
2自适应Fuzzy-PID控制器的设计
为利用模糊推理的方法实现对PID参数的在线自动整定,在PID整定出的参数基础上运用模糊控制器对kp,ki,kd三个参数进行自动修正,使其更具智能化。设△kp,△ki,△kd为模糊控制器的输出,kp′,ki′,kd′为PID整定给出的基值,则PID控制器参数kp,ki,kd为
(5)
(6)
(7)
Fuzzy-PID是基于PID参数调整的原则,并在其参数被整定的基础上进行的调节,再结合系统工况和前人经验总结出△kp,△ki,△kd的模糊控制规则如表1—表3所示。
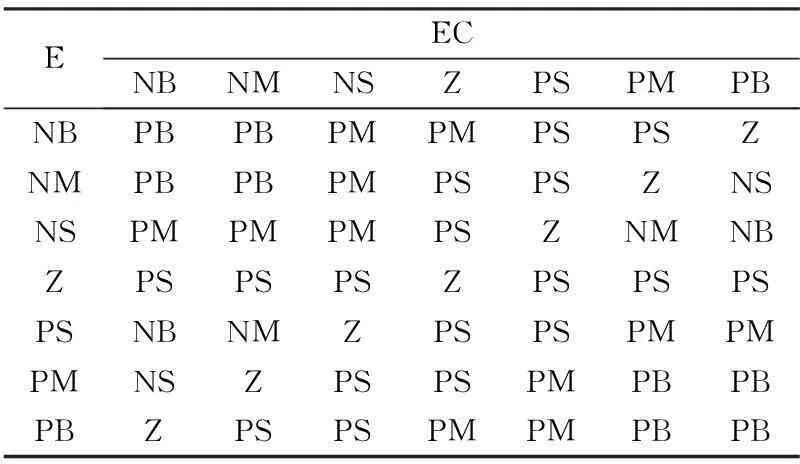
表1 △ k p控制规则表
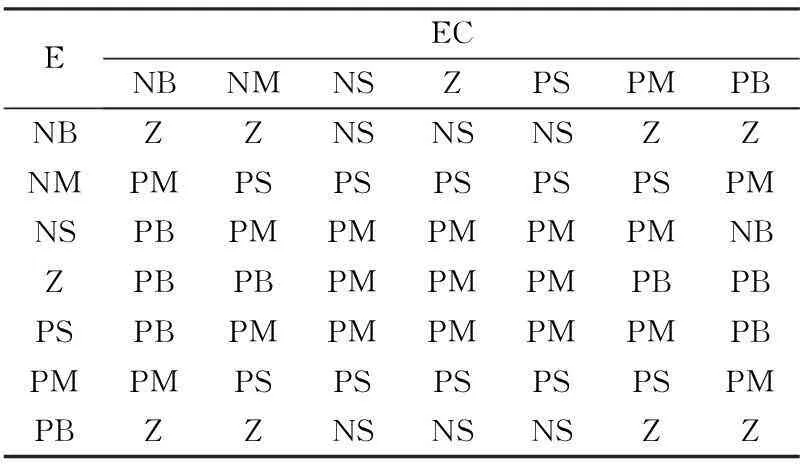
表2 △ k i控制规则表
3仿真研究
为验证基于改进Smith预估补偿及自适应Fuzzy-PID控制的网络控制系统性能,本文分别针对模型完全匹配和模型完全失配情况进行仿真研究。设被控对象、参考信号相同,整个系统不考虑干扰信号的存在,只考虑系统自身时滞,参考信号采用阶跃信号。

表3 △ k d控制规则表
3.1 完全匹配情况
预估模型满足Gm(s)e-τm=G(s)e-τs,Gm(s)=G(S),且τm=τ。
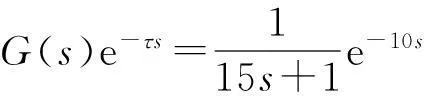
(a) 传统Smith预估补偿器情形 (b) 改进Smith预估补偿器情形 图5 基于传统PID控制器的系统输出响应
对比图5的(a)和(b)图可以看出基于传统PID控制器的网络控制系统中引入改进的Smith预估补偿器的效果不是很理想。但是对比图5和图6两组图形却不难看出,改进的Smith预估补偿器结合自适应Fuzzy-PID控制策略,系统的输出具有较好的动态性和快速响应性。特别是若在反馈通道加入一阶惯性环节,基于自适应Fuzzy-PID控制策略能显著改善系统性能,同时也很好地验证了改进Smith预估补偿器的优点。
3.2 完全不匹配情况
预估模型不满足Gm(s)e-τm≠G(s)e-τs,Gm(s)≠G(s)且τm≠τ。下面分两种情况进行仿真研究。
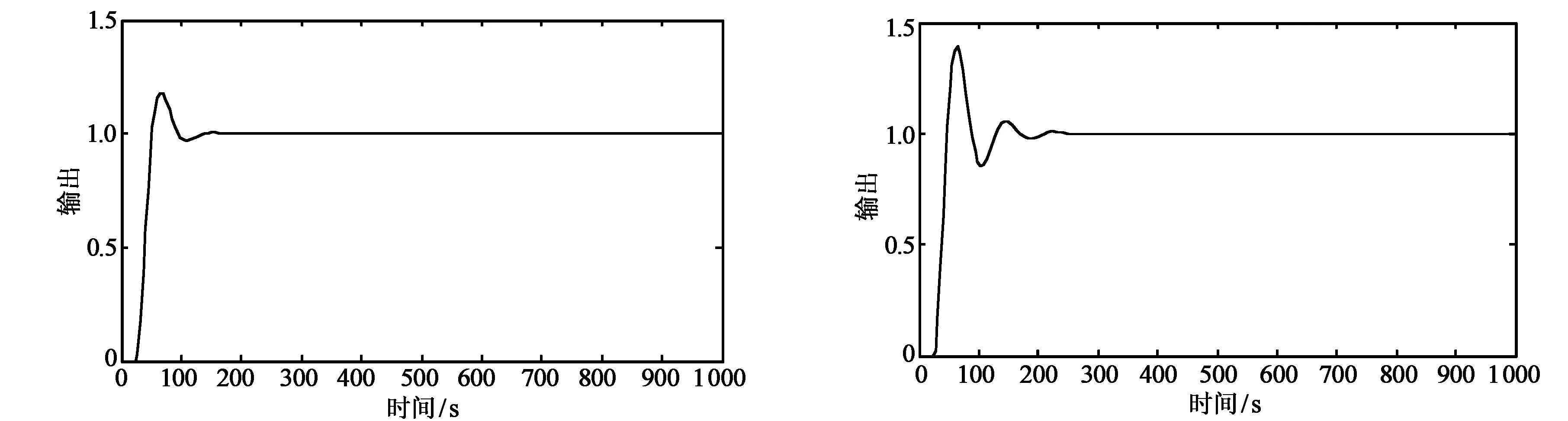
(1)除了时间常数、时滞常数、增益同时增加50%之外的其它参数设置都与完全匹配时相同。仿真结果如图7—图8所示。
(a) 基于传统Smith预估补偿器情形 (b) 基于改进Smith预估补偿器情形 图7 基于传统PID控制器的系统输出响应

(a) 基于传统Smith预估补偿器情形 (b) 基于改进Smith预估补偿器情形 图8 基于自适应Fuzzy-PID控制器的系统输出响应
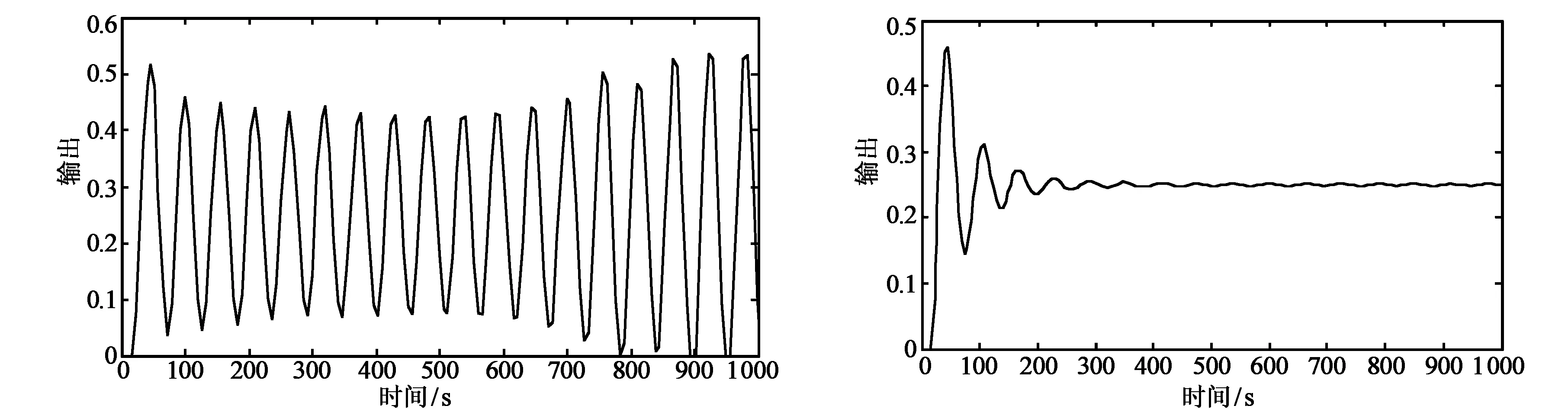
(2)除了时间常数、时滞常数、增益同时减少50%之外的其它参数设置都与完全匹配时相同。仿真结果如图9—图10所示。

(a) 基于传统Smith预估补偿器情形 (b) 基于改进Smith预估补偿器情形 图9 基于传统PID控制器的系统输出响应
(a) 基于传统Smith预估补偿器情形 (b) 基于改进Smith预估补偿器情形 图10 基于自适应Fuzzy-PID控制器的系统输出响应
从图7—图10可看出将传统Smith预估补偿器应用于时滞被控对象时,被控对象的延迟时间必须能够比较准确地把握,更重要的是预估模型的参数与实际模型的参数也必须要严格吻合,一旦发生偏差,系统的动态性能就会变差。在实际的网络控制系统中,若偏差过大,完全可能造成系统不可控(如图7和图9中的(a)图)。在采用传统PID控制器时,预估参数存在误差,从系统响应曲线可看出,系统的动态特性和可控性都将无法准确反映。比较图7—图10的所有(b)图,不难看出,NCS的反馈通道上加入一阶惯性环节能够很好地改善系统的动态特性和响应性能,增强了系统的可控性,采用自适应Fuzzy-PID控制效果更佳。
4结论
针对具有网络时延和被控对象自身时延的网络控制系统,为克服传统Smith预估补偿器需要被控对象的精确数学模型,对传统Smith预估补偿器进行改进,对系统设计了自适应Fuzzy-PID控制器,从而大大改善系统性能。同时可以看出,改进的Smith预估补偿器虽然在反馈通道中加入了滤波环节,但是原来设定的tf值是固定不变的,在实际运行的系统中可能不能很好地满足系统的性能指标,所以应根据实际的工况选择tf值。因此,对tf进行整定将是以后需要重点研究的内容。
[参考文献]
[1]刘安东.网络化系统的滚动时域控制与估计研究[D].杭州:浙江工业大学,2013.
[2]张俊,罗大庸.网络控制系统的Smith预估时滞补偿方法[J].哈尔滨理工大学学报,2012,17(5):34-38.
[3]张连会.基于Smith预估器的模糊PID温度控制算法研究[D].黑龙江:哈尔滨工业大学,2012.
[4]黄越洋,石元博,张茜.基于神经网络Smith预估器的预测控制[J].计算机仿真,2009,26(2):187-189.
[5]薛薇,高建强,贾红艳.基于Smith预估的FNNC_PI复合控制器研究[J].自动化仪表,2006,27(10):30-32.
[6]DU Feng,DU Wen-cai.Wireless Networked Control Systems with Generalized Predictive Control and Novel Smith Predictor[R].International Conference on Control,Automation & Systems Engineering,2009:640-643.
[7]DU Feng,QIAN Qing-quan.Networked Control Systems Based on Generalized Predictive Control and Modified Smith Predictor[R].2008 7th World Congress on Intelligent Control and Automation,2008:7859-7863.
[8]杜锋,钱清泉.基于改进Smith预估补偿的网络控制系统研究[J].系统工程与电子技术,2009,31(3):661-665.
[9]齐朝阳,郑恩让,侯再恩.迭代模型Smith预估控制:算法和稳定性[J].控制工程,2015,22(1):133-138.
[10]王晓娜,左晓菲,张辉.Smith模糊PID匀速升温控制策略研究[J].自动化仪表,2015,36(1):87-90.
[11]邢键峰,纪志成.基于模糊PID的Smith预估碱液温控系统[J].控制系统,2014,43(7):43-47.
[12]关荣根,葛锁良.神经网络分数阶PID在网络控制系统中的应用[J].合肥工业大学学报:自然科学版,2015,38(2):172-174.
[13]孙立强,郑恩让.时滞系统的双自由度Smith模糊PID控制器设计与仿真[J].化工自动化及仪表,2014,41(5):486-523.
[14]杨志刚,钱俊磊.基于PID神经网络的电热炉Smith预估温度控制[J].工业控制与应用,2013,32(4):10-13.
[15]解英杰,尤洋,谢慕君.Smith-Fuzzy-PID在集成供热控制系统中的应用[J].计算机测量与控制,2014,22(9):2823-2825.
[责任编辑:谢 平]
Study on the improved Smith predictor combined with the adaptive Fuzzy-PID controller of the NCS
XU Xing-xing,ZHANG Chun,HE Hui-yun,CHEN Lin
(College of Electrical Engineering, Anhui Polytechnic University, Anhui Key Laboratory of Detection Technology and Automation Devices,Wuhu 241000, China)
Abstract:Traditional Smith predictor must be supported by the precise mathematical model of controlled object in the networked control system with delay of network and controlled object. In order to remedy the deficiency, the traditional Smith predictor was improved by adding a first-order inertial filter in the feedback channel of predictor to solve the issue of parameter mismatch in the controlled object and the predictor. Adaptive Fuzzy-PID controller was used as the system controller. As the simulation results showed, the improved controller possesses good dynamic performance and adaptability.
Key words:delay of network control system;Smith predictor;first-order inertial filter;adaptive
