基于PCHD模型和滑模控制的表贴式永磁同步电机控制系统设计
2016-01-06苏良昱
基于PCHD模型和滑模控制的表贴式永磁同步电机控制系统设计*
苏良昱
(许昌学院,河南 许昌461000)
摘要:为提高表贴式永磁同步电机(SPMSM)系统的稳定性、抗干扰能力和鲁棒性,基于PCHD原理建立了表贴式永磁同步电机的数学模型。基于滑模控制理论,提出了一种表贴式永磁同步电机的速度调整和估计算法,并设计了速度滑模控制器;同时利用滑模观测器估计电机速度;最后采用MATLAB进行了仿真分析。仿真结果表明: 电机估计转速与给定转速能够较好地吻合,电机速度跟踪性能较好,基于该速度调节和估计策略的控制系统具有较好的抗干扰性能。
关键词:表贴式永磁同步电机; PCHD; 滑模控制器; 滑模观测器
基金项目:* 2015年许昌市科技发展计划项目(1502093)
通讯作者:苏良昱
中图分类号:TM 301.2文献标志码: A
收稿日期:2015-04-28
SPMSM Control System Design Based on PCHD
Model and Sliding Mode Control
SULiangyu
(Xuchang University, Xuchang 461000, China)
Abstract:In order to improve the stability, anti-interference and robustness of surface permanent magnet synchronous motor (SPMSM), the mathematical model of surface permanent magnet synchronous motor was established based on PCHD theory. The speed adjustment and estimation algorithm of surface permanent magnet synchronous motor were proposed on the basis of sliding mode control theory. And the speed sliding mode controller was designed. The motor speed was estimated by a sliding mode observer. Finally simulation experiments were carried out by using MATLAB. The simulation results showed that the actual speed and estimated speed could fit well and the speed tracking performance was better. This speed set and estimated strategy of control system had good anti-interference performance.
Key words: surface permanent magnet synchronous motor(SPMSM); PCHD; sliding mode controller; sliding mode observer
0引言
表贴式永磁同步电机(Surface Permanent Magnet Synchronous Motor, SPMSM)具有结构紧凑、功率密度高、转矩惯性比高等优点,但是作为被控对象,其多变量、非线性、强耦合等特点导致在实际应用中存在许多问题[1-2]。目前,广泛使用的矢量控制和转矩控制两种控制方法,虽然能够获得较好的动态、静态性能,但是由于参数的变化、转矩的波动,系统的鲁棒性大大降低[3]。随着先进控制理论的发展,自适应控制[4-5]、滑模变结构控制[6-8]、无源控制[9-11]等方法逐渐出现在永磁同步电机(Permanent Magnet Synchronous Motor, PMSM)控制中。文献[12]基于PCHD原理,研究了PMSM建模和速度控制问题;文献[13]在无源控制的基础上,设计了开关磁阻电机控制器。针对SPMSM控制过程中存在的非线性问题,本文主要建立SPMSM PCHD数学模型并设计一种基于滑模控制理论的SPMSM控制系统,以提高系统的可靠性和鲁棒性。
1SPMSM PCHD数学模型
PCHD系统的形式一般可表示为
(1)
式中:J(x)——反对称矩阵,满足J(x)=-JT(x),其用于体现系统内部的互联结构;
R(x)——半正定对称矩阵,其光滑性决定于x,用于体现端口附加阻性结构;
g(x)——用于体现系统端口特性;
H(x)——用于体现系统存储能量。
若忽略系统粘性摩擦因数,d-q旋转坐标系下SPMSM的数学模型可表示为
(2)
系统的状态向量可表示为
=D[idiqωr]T
(3)

系统的输入、输出量可表示为
(4)
系统的干扰量可表示为
(5)
那么系统的状态空间方程为
(6)
定义SPMSM的哈密顿(Hamilton)函数为电能与机械动能之和,即
(7)
由式(1)~式(7)可得SPMSM的PCHD数学模型为
(8)
2滑模控制系统设计
SPMSMPCHD调速系统主要由外环速度反馈和内环电流反馈组成。外环速度反馈中,速度滑模控制器[14]生成q轴期望电流,用于内环反馈;而内环电流反馈,基于id=0控制模式,通过电流控制器[15]生成电压分量ud和uq。无源滑模控制系统结构如图1所示。
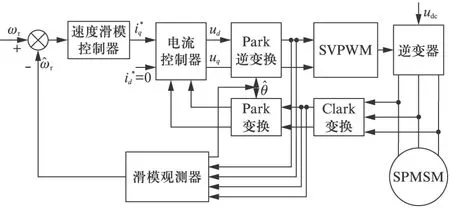
图1 SPMSM滑模控制系统结构
2.1速度滑模控制器设计
系统状态变量可以定义为
(9)
那么SPMSM状态方程可表示为
(10)
为保证系统平滑地达到稳定状态,切换函数可定义为
s=cx4+x5
(11)
式中:c>0。
同样,速度滑模控制器的输出可定义为
u=ε1x4+ε2x5
(12)

(13)
(14)
解方程式(14)得
(15)
式中:c0——常数,若t→∞,x4沿指数曲线趋于零。所以系统可以平滑地实现转速跟踪,进而达到稳定状态。
2.2滑模观测器设计
在α-β静止坐标系下,PMSM数学模型可表示为
(16)
Eα=-ψfωrsinθr;Eβ=ψfωrcosθr。
式中: uα、uβ——PMSM电压分量;
iα、iβ——PMSM电流分量。
若设计滑模观测器,则数学模型可修改为
(17)

切换函数可设计为
(18)
对式(18)求导可得
(19)
为估计滑模观测器的转子速度以及验证滑模观测器的收敛情况,选取李雅普诺夫函数[17]为
(20)
若转子速度为常数,对式(20)求导可得
(21)
将式(19)代入式(21)可得
(22)

(23)
(24)
(25)
式中:αi、βi——均为正数。
上述滑模观测器的模型如图2所示。
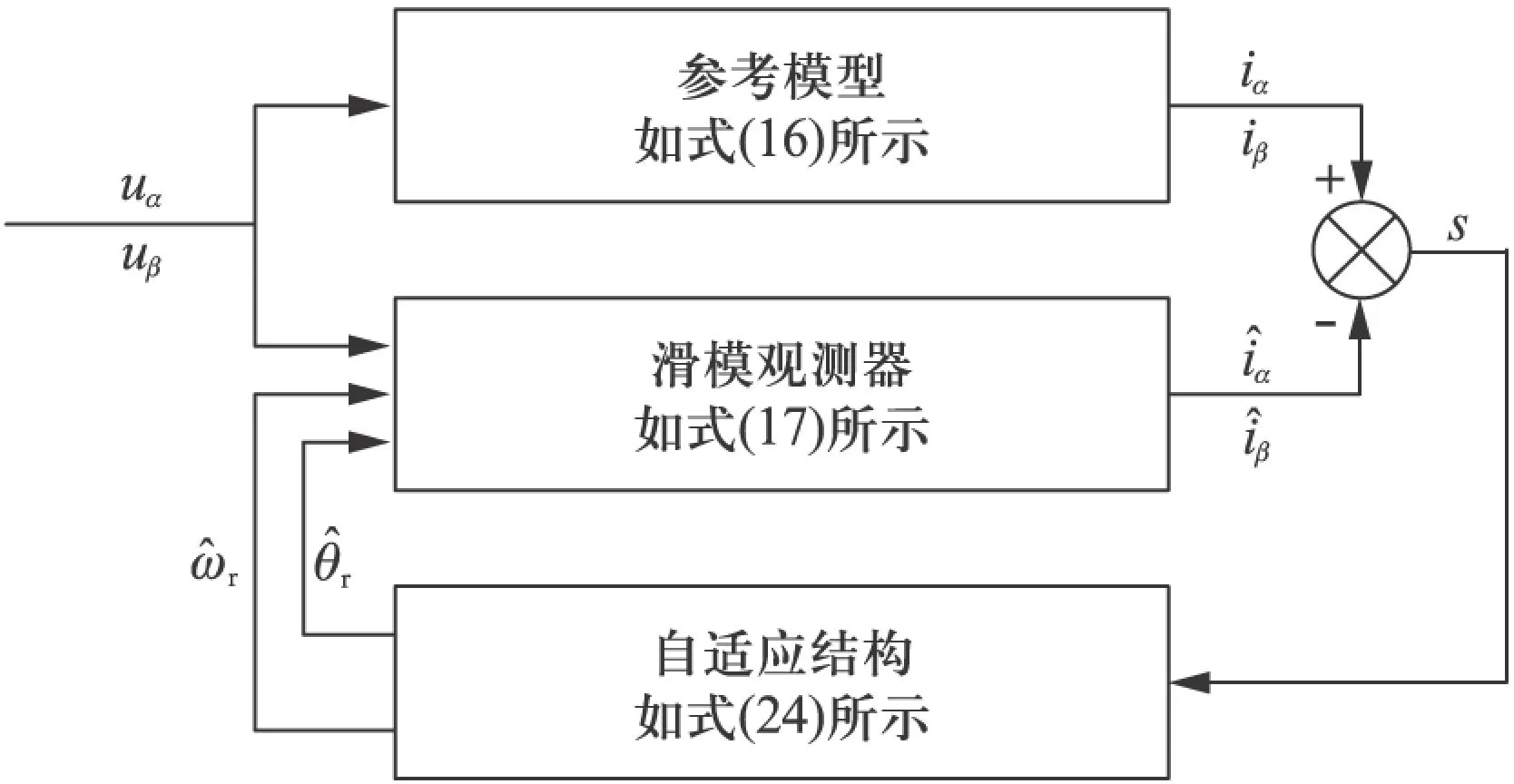
图2 滑模观测器模型
3仿真分析
为验证上述SPMSM PCHD建模方法和滑模控制系统的有效性和可行性,本文采用MATLAB仿真软件进行了仿真分析。SPMSM的主要参数如表1所示;滑模控制系统的主要参数如表2所示。

表1 SPMSM主要参数

表2 滑模控制系统主要参数
首先,在给定转速为100rad/s的情况下,空载时,比较SPMSM的给定转速和估计转速,转速曲线如图3所示。
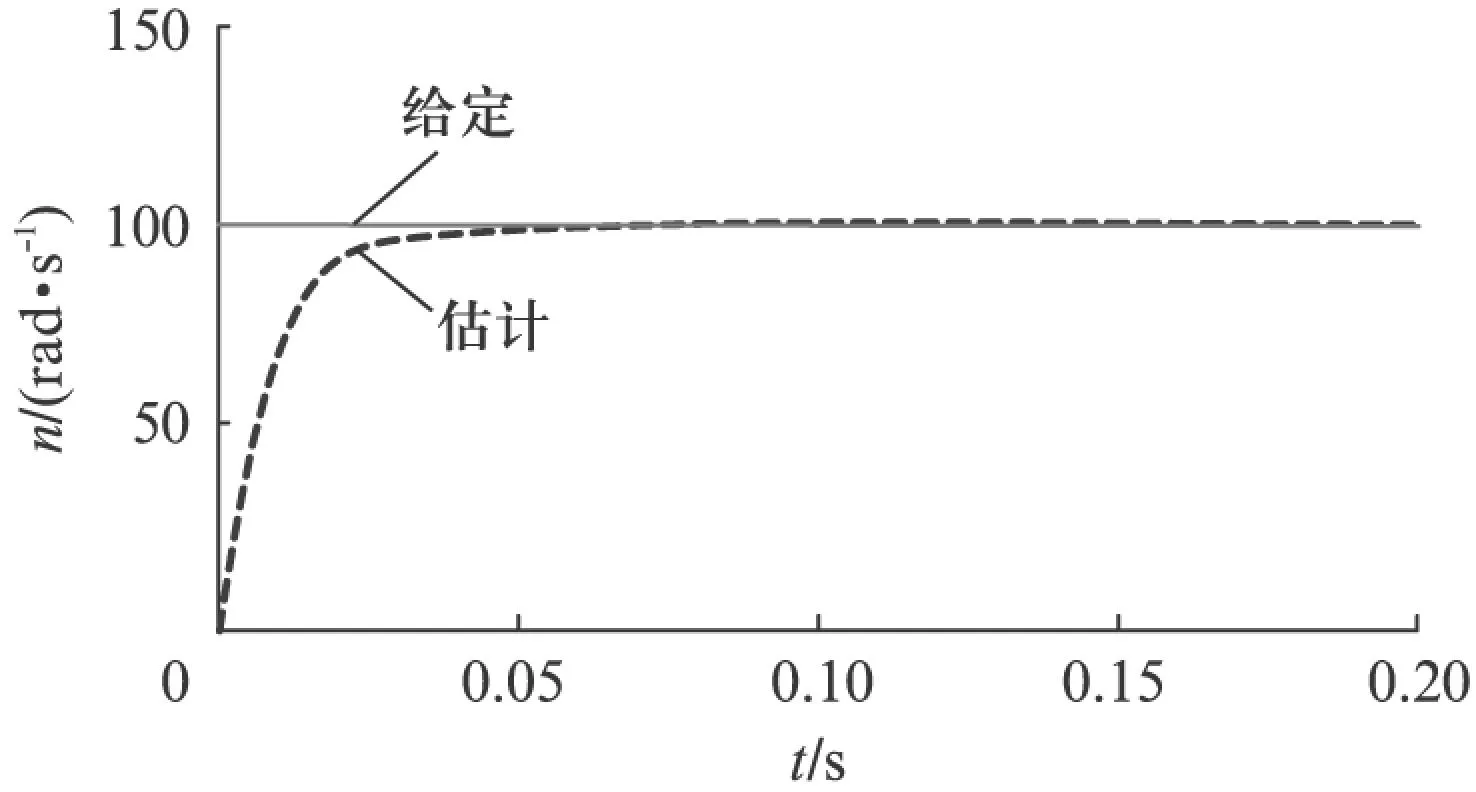
图3 空载时估计转速曲线
其次,测试参数变化和负载转矩扰动对系统的影响。电机给定转速仍为100rad/s,在0.08s时突加负载转矩20N·m,在0.16s时去掉此负载;同时将电机的电阻增加2倍,转动惯量增加2倍,比较SPMSM的给定转速和估计转速,转速曲线如图4所示。
由仿真结果可知,采用本文所述PCHD数学模型和速度滑模控制器,电机速度跟踪性能较好,估计转速与给定转速能够较好地吻合;当负载转矩扰动出现时,给定转速和估计转速仍能保证较高的吻合度,扰动出现和消失瞬间转速波动较小;参数的变化对速度的平滑性影响较小。仿真结果表明: 基于该速度调节和估计策略的控制系统具有较好的抗干扰性能。
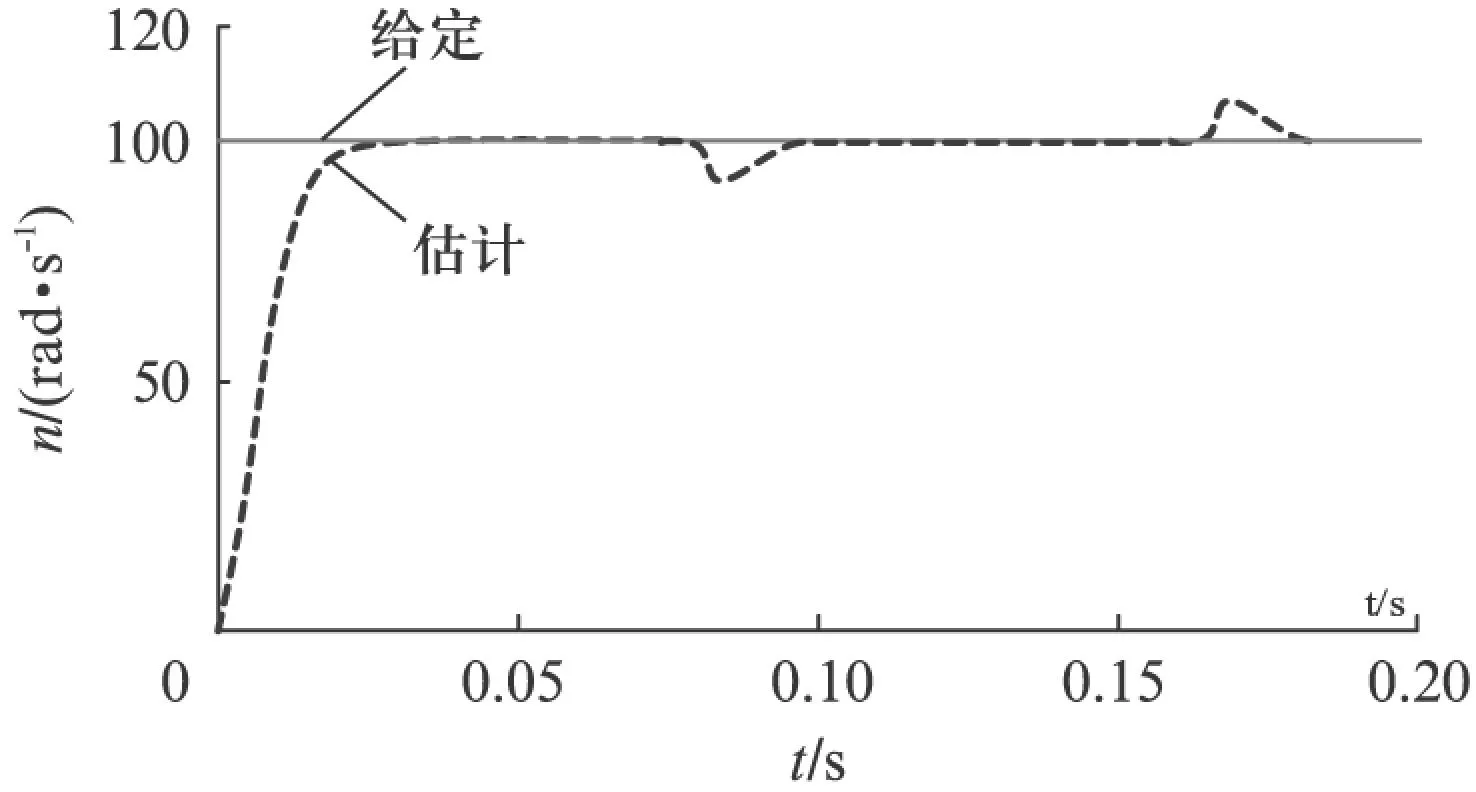
图4 负载突变时估计转速曲线
4结语
针对SPMSM多变量、非线性、强耦合等特性,为满足系统的稳定性、抗干扰能力和鲁棒性,基于滑模控制理论,提出了一种SPMSM的控制系统。设计了速度滑模控制器用于速度反馈控制;同时设计了一种滑模观测器用于电机转速的估计,并进行了仿真分析。由仿真结果可知,基于PCHD模型和滑模控制的SPMSM控制系统具有较好的速度跟踪性能,可以减小负载转矩扰动、参数变化等因素对系统的影响,提高了系统的抗干扰性能。本文所述控制系统对PMSM的控制理论和实际应用研究具有一定的借鉴意义。
【参考文献】
[1]郑泽东,李永东.永磁同步电机控制系统综述[J].伺服控制,2009,1(1): 22-25.
[2]陈荣.交流永磁同步伺服系统的现状与发展[J].电气时代,2005,9(9): 104-107.
[3]李永东,张猛.高性能交流永磁同步电机控制系统现状[J].伺服控制,2008,1(1): 34-37.
[4]MARCH P, TURNER M. C. Anti-windup compen-sator designs for nonsalient permanent-magnet synch-ronous motor speed regulators [J]. IEEE Transac-tions on Industry Applications, 2009,45(5): 1598-1609.
[5]张兴华.永磁同步电机的模型参考自适应反步控制[J].控制与决策,2008,23(3): 341-345.
[6]方斯琛,周波.滑模控制的永磁同步电机伺服系统一体化设计[J].中国电机工程学报,2009,29(3): 96-101.
[7]LAI C K, KUO K S. A novel motor drive design for incremental motion system via sliding-mode control method [J]. IEEE Trans on Industrial Electronics, 2005,52(5): 499-507.
[8]黄佳佳,周波,李丹.滑模控制永磁同步电机位置伺服系统抖振[J].电工技术学报,2009,24(11): 41-47.
[9]ANGELO C D, BOSSIO G, GARCIA G O, et al. Speed control of PMSMS with interconnection and damping assignment or feedback linearization comm-ents about their performance [C]∥ IEEE ISIE, Montreal, Canada, 2006: 2182-2187.
[10]TSAI H C, CHU C C. Nonlinear STATCOM controller using passivity-based sliding mode control [C]∥ IEEE APCCAS, Singapore, 2006: 1996-1999.
[11]GUO Y, XI Z, CHENG D. Speed regulation of permanent magnet synchronous motor via feedback dissipative Hamiltonian realization [J]. IET Control Theory & Application, 2007,1(18): 281-190.
[12]于海生,赵克友.基于端口受控耗散哈密顿方法的PMSM最大转矩/电流控制[J].中国电机工程学报,2006,26(8): 82-87.
[13]杨金明,汪小平,赵世伟.开关磁阻平面电机的鲁棒控制[J].中国电机工程学报,2008,28(30): 104-108.
[14]郑剑飞,冯勇,陆启良.永磁同步电机的高阶终端滑模控制方法[J].控制理论与应用,2009,26(6): 697-700.
[15]李伟,游林儒,毛宗源.基于无源性的永磁电机无速度传感器控制[J].控制理论与应用,2002,19(3): 402-406.
[16]WANG Y H, ZHANG X Z, YUAN X F, et al. Position-sensorless hybrid sliding-mode control of electric vehicles with brushless de motor [J]. IEEE Transactions on Vehicular Technology, 2011,60(2): 421-432.
[17]FOO G H B, RAHMAN M F. Direct torque control of an ipm-synchronous motor drive at very low speed using a sliding-mode stator flux observer [J]. IEEE Transactions on Power Electronics, 2010,25(4): 933-942.

[期刊简介]
《电机与控制应用》(原《中小型电机》)创刊于1959年,是经国家新闻出版总署批准注册,由上海电器科学研究所(集团)有限公司主办的具有专业权威的电工技术类科技期刊。
期刊定位于电机、控制和应用三大板块,以中小型电机为基础,拓展新型的高效节能和微特电机技术,以新能源技术和智能控制技术引领和提升传统的电机制造技术为方向,以电机系统节能为目标开拓电机相关应用,全面报道国内外的最新技术、产品研发、检测、标准及相关的行业信息。
本刊每月10日出版,国内外公开发行,邮发代号4-199。在半个多世纪的岁月中,该杂志为我国中小型电机行业的技术进步与发展做出了巨大的贡献,在中国电机及其应用领域享有很高的影响。
依托集团公司雄厚的技术实力和广泛的行业资源,《电机与控制应用》正朝着专业化品牌媒体的方向不断开拓创新,在全国科技期刊界拥有广泛的知名度,是“中国学术期刊综合评价数据库来源期刊”、“中国科学引文数据库来源期刊”、“中国学术期刊(光盘版)全文收录期刊”,得到了业内人士的普遍认可,备受广大读者的推崇和信赖,多次被评为中文核心期刊、中国科技核心期刊、全国优秀科技期刊。