陀螺全站仪基线场建立及仪器常数测定
2016-01-06喻永平孟兆新
喻永平,孟兆新
(1.广州市城市规划勘测设计研究院,广东广州510060;2.黑龙江省康桥工程技术服务有限公司,黑龙江哈尔滨150090)
陀螺全站仪基线场建立及仪器常数测定
喻永平1,孟兆新2
(1.广州市城市规划勘测设计研究院,广东广州510060;2.黑龙江省康桥工程技术服务有限公司,黑龙江哈尔滨150090)

陀螺全站仪是一种将陀螺仪和全站仪合成一体的用于定向测量的仪器,利用陀螺仪两个物理特性(定轴性和进动性)及地球自转对它的影响,能够在纬度70度范围内的任何地方迅速得出真北方向或任意目标的真方位角。陀螺全站仪被广泛应用在隧道内或其它封闭环境条件下的方向测定,包括建筑、导航、测绘、矿山、地铁、森林及海洋等部门的定向测量。
陀螺全站仪是一种精密仪器,受到仪器自身结构以及外界环境等影响,需要定期进行仪器常数的测定,保证陀螺仪测量精度。国内已经正式发布了《陀螺经纬仪检定规程》 CH/T 4016-2010,本文结合陀螺全站仪特点,建立了陀螺仪基线场,可定期进行陀螺仪仪器常数的测定。
1陀螺全站仪基线场建立内容和要求
陀螺全站仪是一种精密仪器,陀螺全站仪受环境影响较大,为了测定陀螺全站仪常数和检核陀螺北方向测量的精度,需要定期进行仪器常数的测定。陀螺仪基线场建立内容包括:
1)设置稳定的仪器检校平台,包括测站点和观测点设置要稳定可靠;
2)方位角基线检校场网型优化设计;
3)方位角基线检校场的测定;
4)陀螺仪常数周期性测定。
方位角基线检校场建立要求如下:
1)测站点和观测点要求。测站点要求稳定,最好为强制对中装置;观测点目标要稳定、清晰,距测站点在300~500 m左右。
2)方位角基线检校场网型设计。方位角基线检校场网型须可靠,确保精度。
3)方位角检校场的精度。陀螺全站仪一次定向标准偏差优于±8 s,要求方位角检验场的测量精度为±3 s。
陀螺仪基线场的建立综合考虑上述要求,进行场地选取、基线场网图优化设计以及方位角检校场的测定。
2陀螺全站仪基线场建立过程
2.1 陀螺仪基线场网图设计与优化
在综合考虑测站点和观测点要求、方位角检校场精度和便于陀螺仪仪器常数测定的前提下,经实地踏勘,选取了室内点作为测站点,室外300~500 m距离的稳定目标点作为观测点,选点示意图如图1所示。

图1 基线场选点示意图
基线场网图经反复优化设计,确定在我院楼顶西面设置过渡点GX12,利用院楼顶1个四等GPS点(规划院北)和旧楼9楼顶的观测墩点(强制观测墩GX9,为四等GPS点精度)作为已知点进行测量,并且测量了2个CORS点作为已知点,确定如图2所示观测网。
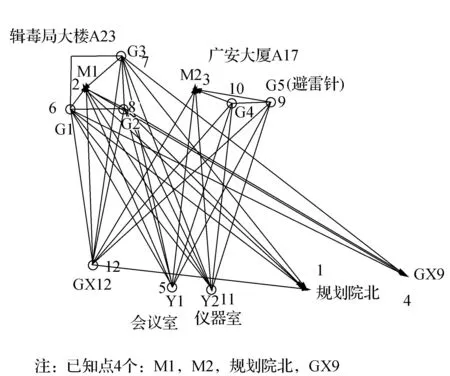
图2 基线场观测图
在图2中,确定7个测站的方向测量值和15个距离测量值。
7个测站的观测方向:
规划院北至G2,G3,G1,M1,GX12;
M1至规划院北,Y2,Y1,GX12,G1,G3,G2,GX9;
M2至规划院北,Y2,Y1,GX12,G5,G4;
GX9至G2,G3,G1,M1;
Y1至G2,G3,M2,G4,G5,G1,M1;
Y2至G2,G3,M2,G4,G5,G1,M1;
GX12至M1,G2,G3,M2,G4,G5,规划院北,G1。
15个距离测量值:
M1至Y2,Y1,G1,G3,G2;
M2至Y2,Y1,G5,G4,GX12;
G1至G2,G1至G3,G2至G3,规划院北至GX12,GX9至GX12。
2.2 方位角检校场外业测量及数据处理
1)M1,M2点CORS测量。利用天宝R8仪器和我院已有的CORS测量系统,在该2点上进行精密RTK测量,确定M1和M2点坐标。
2)强制观测墩点(GX9)测量。采用GPS静态测量,在GX9点上用GPS静态测量4 h,与3个GZCORS基准站点构网解算GX9点的坐标。该点三维约束平差后,3个GZCORS基准站和楼顶GX9点所构成的网最弱边相对精度为3.18 ppm,其边长为7 129.135 8 m(WUSH-GX9);GX9平面位置精度为±2.60 cm,大地高精度为±4.74 cm,成果满足四等网要求。
3)边角测量。方位基线测量网采用了我院最新购置的TM30精密测量仪器进行了边角测量,角度测量2测回,边长测量2测回。
边长G1至G2,G1至G3,G2至G3采用殷钢尺进行丈量。
2.3 方位基线测量网的平差计算
对于基线方位测量网,以M1,M2,规划院33楼顶的RTK检测点(规划院北GB)、楼顶的强制观测墩点(GX9)作为起算点进行平差计算,采用ADJNET网平差软件进行平差计算,平差验后方向值方差 MD0=±1.66 s,最弱点(Y1、Y2)中误差为:MX=±0.34 cm,MY=±0.31 cm,M=±0.46 cm。满足了方位角检验场±3 s测量精度的要求。
2.4 基线方位夹角检测
采用TM30,TCA2003,T2,TOPCON3102,苏光J2和苏光2 s全站仪6种仪器对基线方位夹角进行了检测,每种仪器观测3测回,6种仪器已知点方位角测量值见表1、表2、表3所示。
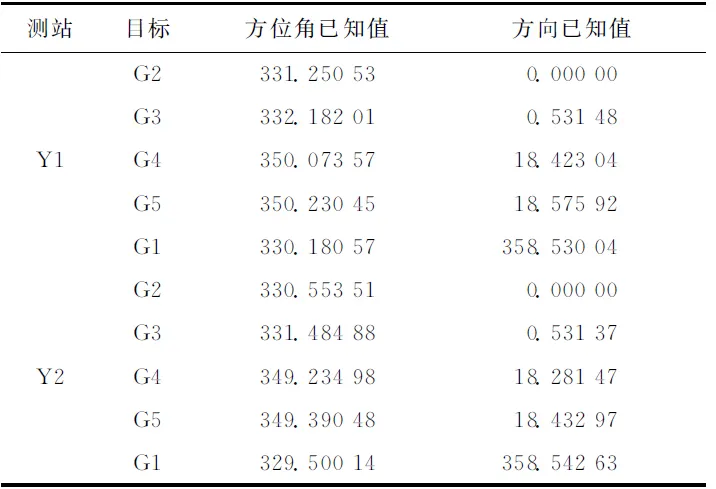
表1 已知点方向值

表2 TM30,TCA2003,T2 3种仪器测量值
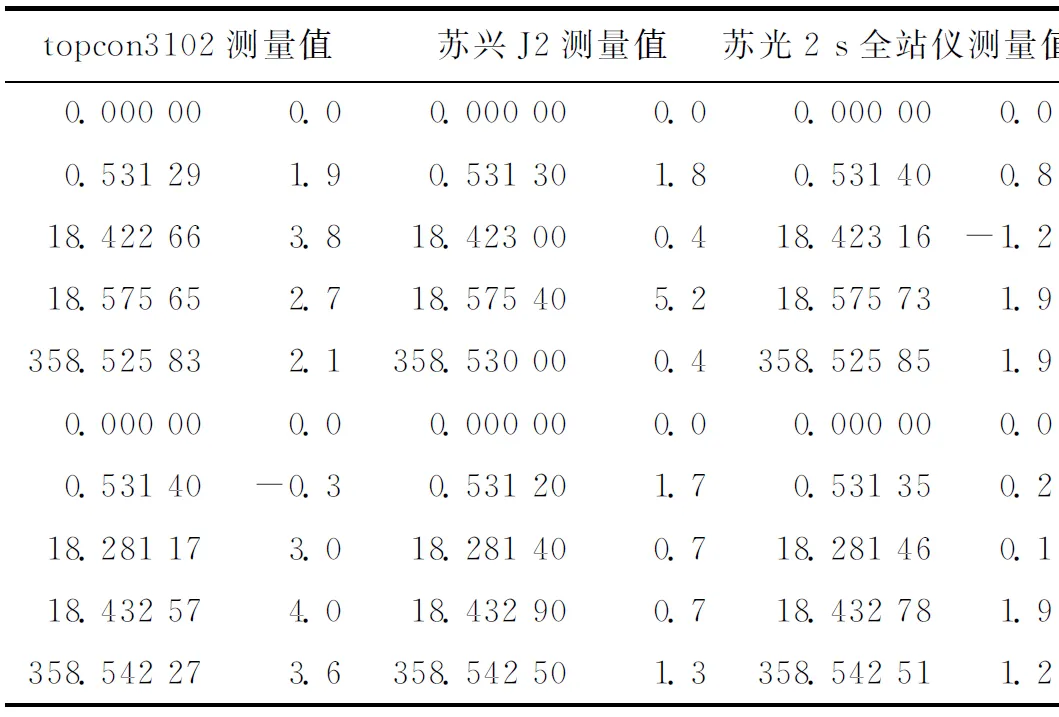
表3 topcon3102,苏兴J2、苏光2 s测量值
通过表1、表2、表3数据比较可以得知,6种仪器(TM30,TCA2003,T2,TOPCON3102,苏光J2和苏光2 s全站仪)测量的方向值与成果方向值较差值最大为+5.2 s(J2仪器),满足3 s精度的方位角的夹角检测要求(限差为2*1.414*3=8.5 s),其中TM30,TCA2003,T2,苏光2 s全站仪仪器测量的夹角符合较好,较差在±3.0 s以内。
3陀螺仪基线场应用
3.1 陀螺全站仪仪器常数测量原理
用陀螺仪测量的陀螺方位角为该点的真北方位,转换为坐标方位角αa要考虑仪器常数Δ和子午线收敛角γa。
(1)
式中:αa为坐标方位角,αTa为定向边陀螺方位角(真北方位),Δ为仪器常数,γa为子午线收敛角。
子午线收敛角为真北方位与坐标X轴的夹角γa=αTa-αa,点位在X轴右侧子午线收敛角为正值,点位在X轴左侧子午线收敛角为负值,见图3所示。
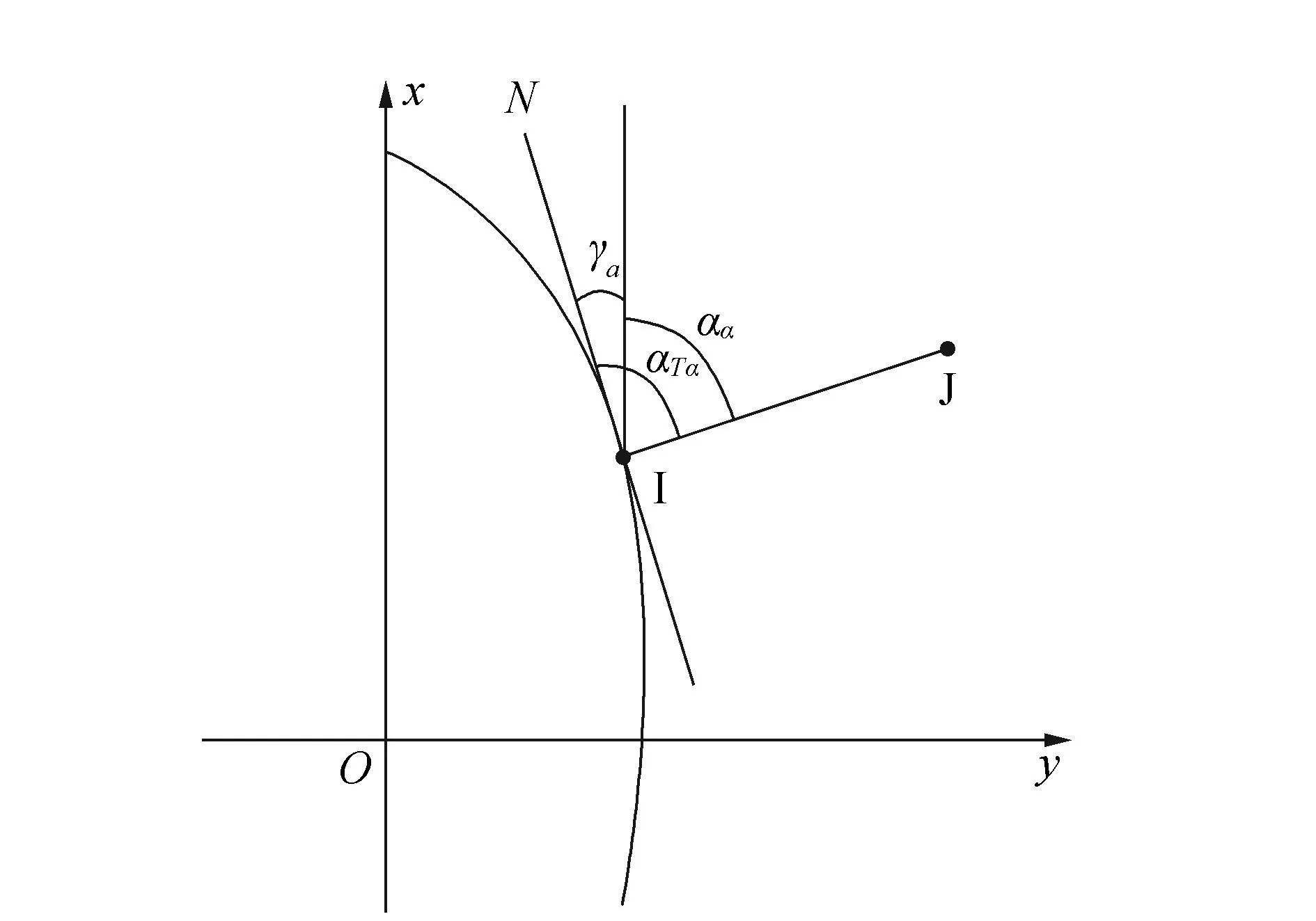
图3 子午线收敛角计算示意图
对式(1)进行变换,仪器常数计算式如下:
(2)
在I点上测出I→J边陀螺方位角αTa,根据I、J坐标计算I→J边坐标方位角αa和I点的子午线收敛角,按式(2)即可计算出仪器常数。
3.3 测量结果
为检验已建方位基线场的精度和可靠性,项目组对国内NTS-341T陀螺全站仪进行常数测定,共检测了5条基准方位角:Y1→G1,Y1→G2,Y1→G3,Y1→G4,Y1→G5。上、下午各观测一组数据(4测回),比较测定的仪器常数的符合性。
上午仪器常数的测定,最大最小值差4.4 s,常
数平均值-60.1 s;下午仪器常数的测定,最大最小值差7.2 s,常数平均值-62.0 s。上、下午测定的仪器常数互差为1.9 s,说明陀螺仪测量稳定,基线方位精度高。
该陀螺仪常数为上、下午测量的平均值-61.0 s,仪器常数测定精度为±2.5 s。
4结论与建议
本文完成了室内方位角基线场建立和陀螺仪的仪器常数测量,其中室内方位角基线场有2个测点(Y1和Y2),10个基线方位,方位精度为±3 s,满足设计要求,通过对陀螺全站仪进行仪器常数测定,仪器常数为-61.0 s,仪器常数测定精度为±2.5 s。
陀螺仪基线场建立和仪器常数测定是工程测量中经常需要面对的问题。本文结合我院陀螺全站仪特点,在参考《陀螺经纬仪检定规程》基础上,建立了陀螺仪基线场,可定期进行陀螺仪仪器常数的测定,保证陀螺仪测量精度。该方法可为国内其他拥有陀螺全站仪的生产单位提供参考。
参考文献:
[1]高福聚.陀螺经纬仪定向精度分析[J].测绘工程,1995,4(3):14-19.
[2]张学庄.提高陀螺经纬仪定向效率的方法[J].测绘工程,2006,15(1):1-5.
[3]王佩贤,程飞,马国强.陀螺定向中仪器常数的适用范围[J].测绘科学,2015,40(3):112-114.
[4]沈志明,张则宇,刘智超.Gyromat 2000陀螺经纬仪的应用[J].海洋测绘,2006,26(5):68-70.
[5]杨志强,李光春,石震.Gyromat 2000高精度陀螺全站仪在长江隧道贯通中的应用[C]//中国公路学会隧道工程分会,陕西省交通厅.2007年全国公路隧道学术会议论文集.重庆:重庆大学出版社,2007.
[6]张明,陈亚楠.陀螺经纬仪定向精度的分析[J].矿山测量,2006(6):43-44.
[7]马强.基于加测陀螺定向边的井下支导线升级改造[J].测绘工程,2015,24(5):57-62.
[8]袁曼飞,靳洁,刘钰.基于Sage-Husa自适应Kalman滤波的磁悬浮陀螺转子信号处理[J].测绘与空间地理信息,2015,38(4):59-60.
[责任编辑:王文福]
摘要:陀螺全站仪是一种精密仪器,在工程测量中有广泛应用。文中通过布设陀螺仪基线场,利用TM30高精度测量机器人测定基线场边长和角度,并进行网平差计算,获取该基线场方位角精度,可定期进行陀螺仪仪器常数的测定,为国内其他拥有陀螺全站仪的生产单位提供参考。
关键词:陀螺全站仪;基线方位角;仪器常数;子午线收敛角
The baseline field establishing and instrument constant measuring of gyro total stationYU Yong-ping1,MEN Zhao-xin2
(1.Guangzhou Urban Planning & Design Survey Research Institute,Guangzhou 510060,China; 2.Heilongjiang Kangqiao Engineering Technology and Service Co.Ltd.,Harbin 150090,China)
Abstract:Gyroscope is a precision instrument.This paper sets up a gyroscope baseline field,which measures the baseline field edges and angles by using TM30 high precision measurement of the robot.And the network adjustment computation is used to obtain the baseline field azimuth accuracy,which can be the regular gyro instrument constant measuring,and provide a reference for other domestic with gyro total station instrument production unit.
Key words:gyro station;baseline azimuth instrument constant;meridian convergence
作者简介:喻永平(1979-),男,汉族,博士,研究员,研究方向:GNSS技术和精密工程测量
收稿日期:2014-09-25;修回日期:2015-04-06
中图分类号:P258;P24
文献标识码:A
文章编号:1006-7949(2015)12-0072-03
