具有相关噪声和不确定观测系统的全局最优Kalman滤波
2015-12-31陈东彦余永龙胡军
哈尔滨理工大学学报 2015年4期
陈东彦+余永龙+胡军
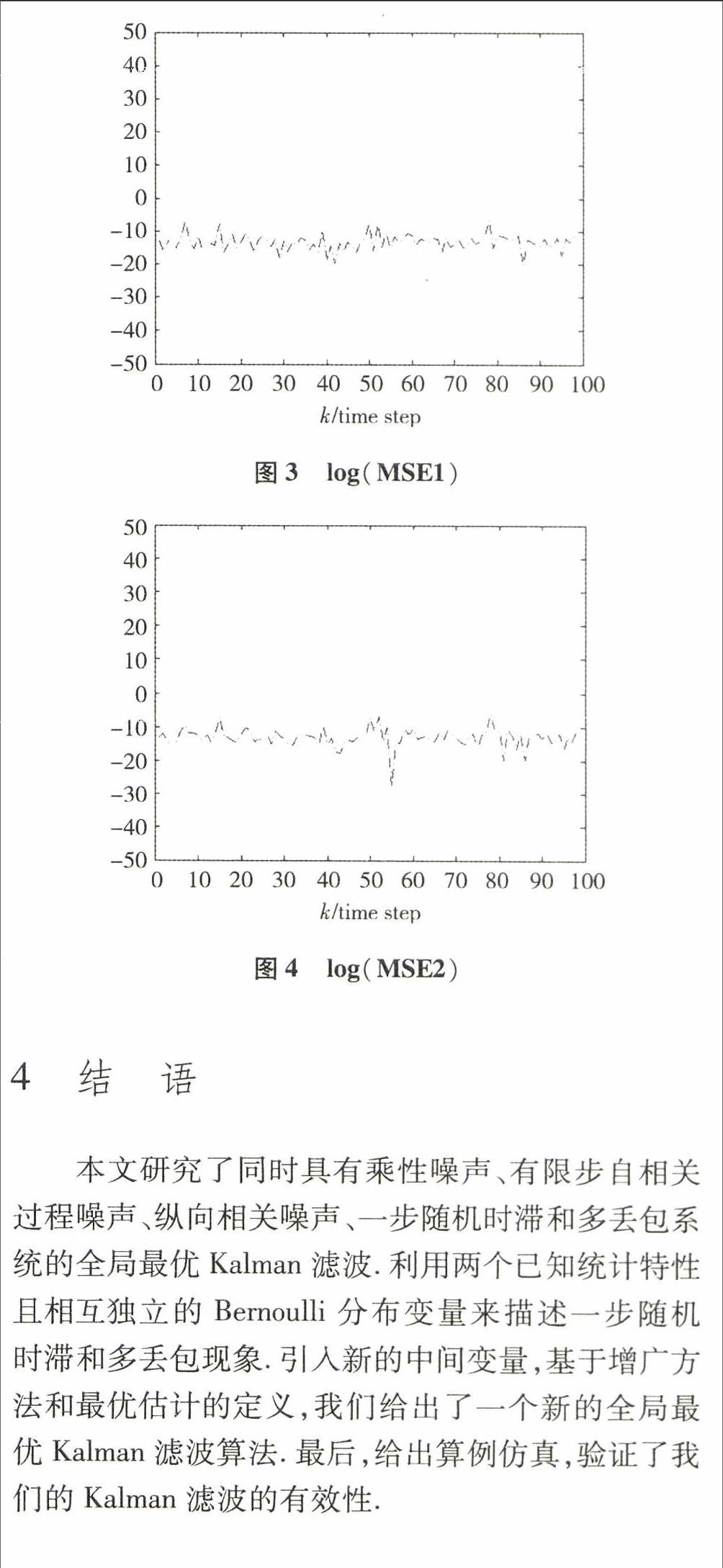
摘要:研究了具有不同源噪声和不确定观测的离散线性随机系统的全局最优Kalman滤波问题,乘性噪声是用来描述系统的随机扰动,相关噪声包括了有限步自相关过程噪声和纵向相关噪声,不确定观测包括了一步随机时滞和多丢包,由Kmnecker delta函数来描述有限步自相关过程噪声和纵向相关噪声,通过两个已知统计特性且相互独立的Bemoulli分布变量来描述一步随机时滞和多丢包现象,基于最优估计的定义,在最小均方误差意义下设计出全局最优Kalman滤波,最后,算例仿真验证滤波方法的有效性。endprint