陀螺罗经性能测试方法研究
2015-12-31陈晓丽
陈晓丽
(解放军92941部队,辽宁葫芦岛 125000)
0 引言
电罗经又称陀螺罗经,它能自动、连续地提供舰船的航向信号,并通过航向发送装置将航向信号传递到舰船需要航向信号的各个部位。从而满足舰船导航及武备系统的要求,是舰船必不可少的精密导航设备,被称为舰船的“眼睛”。全套设备由主罗经、分罗经和附属仪器三部分组成,核心部件是主罗经内的陀螺球。陀螺球是提供航向信号基准的敏感部件,是确保电罗经产品精度、性能指标的首要关键部件。
1 陀螺罗经的基本原理
陀螺不旋转时,其轴线可以任意改变。当其高速旋转而又没有受到外力影响时,它就不会改
变轴线的方向,维持空间一定的指向,这种特性,称为陀螺的定轴性。当旋转的陀螺受到某种外力作用时,它又按一定的规律不断地改变其轴线的空间指向,这叫陀螺的进动性。
电罗经正是应用了陀螺仪的定轴性和进动性,使其旋转轴线精确跟踪地球子午面,并且始终准确地指向地理北极,这样,无论船舶航行到哪里,都可以依此确定航向。
2 陀螺罗经的主要特性
2.1 陀螺罗经主轴的等幅摆动
通过对自由陀螺仪施加控制力矩制成的陀螺罗经,罗经主轴只具有自动找北的能力而不能稳定指北,其自动找北的运动轨迹是呈扁平的椭圆轨迹。
这一椭圆运动轨迹的中心位于子午面内,椭圆的两长半轴相等,两短半轴也相等,因此椭圆运动轨迹是等幅椭圆。
罗经主轴作等幅椭圆运动(自由摆动)一周所需要的时间,称为陀螺罗经的自由摆动周期(period of free-oscillation)T0。
自由摆动周期T0的大小:

式中,ωecosφ为地球自转角速度ωe的水平分量。
陀螺罗经的自由摆动周期与罗经的结构参数(H、M)和纬度有关。
T0等于84.4 min时,称为陀螺罗经的理想自由摆动周期,这时若船舶机动航行,船上的陀螺罗经将不产生第一类冲击误差。
理想自由摆动周期所对应的纬度称为陀螺罗经的设计纬度(chosen latitude)(φ0),设计纬度是设计罗经时所选取的一特殊纬度。
2.2 陀螺罗经阻尼曲线
启动时间,是陀螺罗经主轴在控制力矩和阻尼力矩的作用下,由指示任意方向到稳定指北所需要的时间。阻尼运动,是在启动时间内,陀螺罗经主轴的运 动,轨迹是一种逆时针收敛螺旋线。阻尼曲线(damping curve) (如图1所示),启动罗经时,由于船舶航向固定不动,记录器记录的航启动陀螺罗经所需要的时间除了与阻尼周期TD和阻尼因数ƒ有关外,还与启动罗经时其主轴的初始方位角α0有关。罗经启动时间的长短只随船舶所在的纬度和主轴的初始方位角变化。陀螺罗经都采用启动时减小罗经主轴的初始方位角(和初始高度角),进行快速启动。在阻尼迹线就是罗经主轴的阻尼运动轨迹(如图 2所示)。
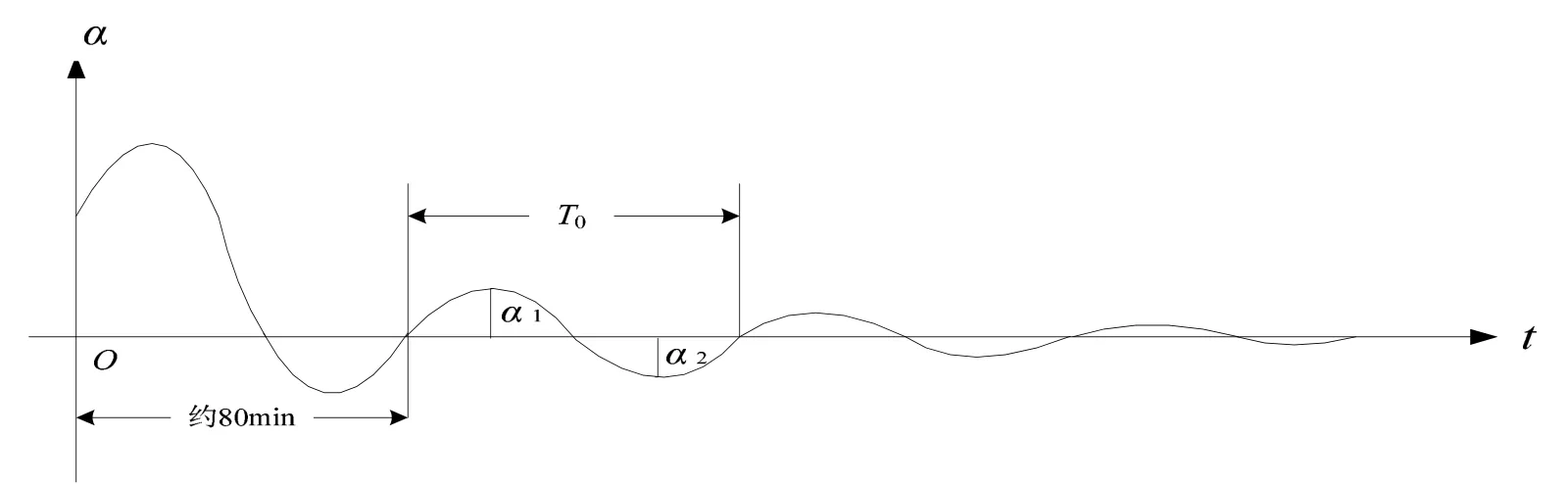
图1 陀螺罗经的阻尼曲线

图2 陀螺罗经主轴运动轨迹
2.3 阻尼周期(damping period,TD)
陀螺罗经主轴作阻尼运动一周所需要的时间:

陀螺罗经的阻尼周期的大小与罗经结构参数H、M(Ky)、C(MD或Kz)和纬度有关;
2.4 阻尼因数(damping factor,ƒ)
陀螺罗经主轴作阻尼运动时,主轴偏离子午面以东(或以西)的方位角α最大值与相继偏离子午面以西(或以东)的方位角最大值之比:

陀螺罗经阻尼因数ƒ的大小由罗经结构参数决定,结构参数一定,其阻尼因数为定值。
各种陀螺罗经的阻尼因数ƒ可能不同,一般为2.5~4。阻尼因数ƒ也是决定陀螺罗经启动时间的因素之一。
2.5 启动时间
力矩的作用下,罗经主轴的方位角α和高度角θ不断减小,最终使方位角α为零,罗经主轴稳定指北。这种采用液体阻尼器获得阻尼力矩的罗经又称为液体阻尼器罗经。
陀螺罗经的启动过程,陀螺罗经在控制力矩作用下能够自动找北,在此基础上,在阻尼力矩作用下,经过一定的时间就能够稳定指北。
陀螺罗经的适用纬度一般为 80°以下,否则罗经指向精度降低或不能正常指向。
3 陀螺球性能测试平台设计
3.1 整体设计
根据上述分析陀螺罗经的主要性能指标,可以看出通过实时记录陀螺罗经的输出航向数据曲线,可以得到陀螺球的阻尼周期、阻尼因数、启动时间等参数。为此,结合试验室陀螺球摇摆台,设计陀螺球试验测试数据硬件平台,通过计算机采集航向数据、实时日历时间,利用计算机自动分析陀螺球的启动时间、阻尼周期、阻尼因数、摇摆试验特性数据等指标。
整体试验数据采集平台采用 LPC1768单片机为核心,使用轴角数字转换模块 ZSZ-14模块将航向模拟发送信号转换为数字信号,单片机将数据处理分析并存储,将数据采集陀螺球的试验数据实时分析,数字输出陀螺球的各项性能参数,实现无人干预条件下自动实现陀螺球的性能鉴定和参数采集,大大提高了陀螺球性能试验工作效率。整体硬件结构如图3所示。

图3 陀螺球试验测试平台数据采集硬件结构图
3.2 硬件平台设计
陀螺球试验平台数据采集与控制的硬件平台,以ARM单片机LPC17683和自整角机轴角采集模块ZSZ为核心以及其他辅助电路组成。LPC1700系列ARM是基于第二代ARM Cortex-M3内核的微控制器,是为嵌入式系统应用而设计的高性能、低功耗的 32位微处理器,适用于仪器仪表、工业通讯、电机控制、灯光控制、报警系统等领域。其操作频率高达120 MHz,采用3级流水线和哈佛结构,带独立的本地指令和数据总线以及用于外设的低性能的第三条总线,使得代码执行速度高达1.25MIPS/MHz,并包含1个支持随机跳转的内部预取指单元。LPC1700系列ARM增加了一个专用的Flash存储器加速模块,使得在Flash中运行代码能够达到较理想的性能。
ZSZ自整角机/数字转换模块是一种采用跟踪转换技术和模块化结构的数字化器件,它应用二阶伺服回路,输出与TTL电平兼容的并行自然二进制码,测量精度达到0.01°,兼容性好。ZSZ自整角机/数字转换器与PCL-730 I/O模块配合,经计算机对信号的采集、处理,得到相应的角度数值,使数字化技术在角位置测量中得到应用。
采用 ZSZ自整角机/数字转换模块研制适用于角位置测试的“SJW型角位置测试系统”,直接将感应同步器(自整角机)输出的三线自整角机信号用ZSZ自整角机/数字转换器接收,经ZSZ转换模块转换成10~16位与TTL电平兼容的并行自然二进制码,且在数字输出端包含三态锁存器,再经 I/O接口模块读取 TTL电平,计算机进行实时数据处理、显示、通讯,实现实时性、高精度、大数据量的信号采集。对陀螺球输出航向信号的分析,要满足其数据采集的精度和实时性要求,必须使用分辨率高、转换速度快的转换器,测试系统中选用ZSZ自整角机/数字转换器作为航向信号采集和处理的核心器件。
自整角机的电压信号接到S1、S2、S3,通过微型变压器后转化为正余弦形式输出电压,其中:

这里θ是自整角机的轴角,E0sinωt是激磁电流电压。假设可逆计数器现时代码为φ,则:

这些信号经误差放大后得到:

由相敏检波、积分器、压控振荡器和可逆计数器组成的闭环系统可使 s in(θ-φ)为零(即θ=φ),当这个过程完成时,可逆计数器的数字量φ值就等于自整角机的轴角θ值,也就完成了对θ角的数字化过程。自整角机轴角数字转换原理图如图4所示,ZSZ模块外围电路如图5所示。

图4 自整角机轴角数字转换原理图

图5 ZSZ轴角数字转换外围电路图
3.3 软件设计
系统主程序是以嵌入式操作系统 uC/OS-IIV 2.86为核心,在LPC1768硬件平台上的移植,设计轴角数字转换程序、航向数据处理、数据对外发送、数据存储、RTC时间处理等子任务。利用嵌入式操作系统对各个子任务进行调度执行,实时对航向数据进行采集,可以有效发挥LPC1768的强大处理能力,提高了数据处理效率。最终航向数据发送格式采用NMEA0183格式,通过RS485总线将航向数据对外发送。
航向数据处理子任务是整个软件系统最为核心的子程序,也是实现陀螺球性能自动鉴定的核心程序,本程序实时对所采集到的当前航向信息进行分析,查找航向峰值点时间、阻尼周期、航向变化规律、纵倾摇摆时航向变化等数据,通过对航向数据的实时分析得出陀螺球的性能指标,实现自动鉴定4陀螺球试验数据的功能。
4 结论
本文通过分析陀螺罗经的主要原理以及主要性能,结合理论分析数据总结得到了陀螺球性能测试的理论基础和测试指标,最终提出了一种基于32位单片机LPC1768的计算平台,将陀螺球试验平台数据实时采集,并对数据进行实时分析、存储,最终根据所采集到的陀螺球性能测试数据得到陀螺球的启动时间、阻尼周期、阻尼系数、摇摆振动试验数据等性能指标,最终将所得到的试验数据通过液晶显示模块显示,并可以数字输出所试验的陀螺球的性能指标。通过该陀螺球测试平台的设计,大大提高了陀螺球性能测试水平,提高了测试数据的精度,并对测试数据可以实现历史追溯跟踪,最终实现了陀螺球试验平台的自动化检测。
[1]陆永平,岑文远.感应同步器及其系统[M].北京:国防工业出版社,1985.
[2]浦昭邦,王保光.测控仪器设计[M].北京:机械工业出版社,2001.
[3]LPC1768 Data Sheet [M].NXP,2009.
[4]妖天任,孙洪.现代信号处理[M].武汉:华中科技大学出版社,1999.
