火控雷达自动水柱测偏技术实现与分析
2015-12-31陈卫华邹士迁陈利锋
陈卫华,邹士迁,陈利锋
(解放军92941部队,葫芦岛 125001)
0 引言
根据弹着水柱落点偏差进行对海射击校正,是当代大中口径舰炮武器系统普遍采用的一种手段,而弹着水柱的落点测量通常由舰炮火控雷达完成。传统的测量方法为人工检测法:雷达天线在方位一定范围内扇扫,操作手通过B式平面显示器观测,并利用摸球提取水柱相对目标的方位和距离偏差。为保证强弱信号的同步提取,雷达接收通道上通常增设专用的对数通道。随着舰炮武器射击精度不断提升,弹着落点散布越来越小,在雷达跟踪波束内实现水柱的落点测量成为可能。传统的人工检测方法虽然直观,但检测精度与操作手的操作水平、心理素质、精神状态等密切相关;而专用接收通道的设置也势必增加雷达结构上的复杂性。那么如何克服传统检测的弊端呢?自动水柱测偏成为一种选择。
所谓自动水柱测偏,是指雷达在跟踪目标(舰船)的同时,对其跟踪波束内、一定距离范围内的弹着水柱,实现全自动地检测与跟踪,并实时输出弹着水柱相对目标(舰船)的方位和距离偏差等瞬时量测信息。本文针对单脉冲机械扫描体制的舰炮火控雷达实现自动水柱测偏所采用的主要关键技术进行了深入探讨,并就其自动测偏有效性及适用性进行了分析。
1 自动水柱测偏原理
单脉冲机扫火控雷达自动水柱测偏采用了多目标实时跟踪技术,具体为:对海工作模式下,雷达收到“水柱测量”指示后,在跟踪目标(舰船)的同时,在目标(舰船)跟踪波门前后一定距离范围内,各布置一定数量的水柱检测波门,检测波门的数量n由发射脉冲宽度、雷达波束宽度和水柱测量范围等指标确定。
当水柱检测波门内检测到可能水柱目标时,雷达的距离环和速度环对该可能目标进行跟踪,经数据分析判断通过后,输出其相对舰船目标的方位与距离偏差。同时雷达信息处理中心根据目标(舰船)与水柱相对位置,以及水柱出现时间顺序,编制多目标批次、序号,完成多目标时序控制及参数处理。当水柱的信噪比低于程序设定值或水柱持续时间超过设定值时,则自动撤消对其跟踪。
2 自动水柱测偏技术难点
单脉冲机扫火控雷达要实现自动水柱测偏,必须针对水柱目标的特殊性,多目标自动检测的复杂性等,克服以下技术难题。
2.1 同一线性通道下的多目标检测
水柱目标由弹丸入水爆炸形成一定面积水幕产生,瞬时出现、变化迅速、持续时间短暂,且深受风速、风向、海情等条件影响,回波强度统计值通常低于同等距离的大中型舰船。受此影响,传统雷达系统多采用对数接收机来减少舰船与水柱回波之间的强度差异。单脉冲机扫火控雷达要在不增设专用接收通道前提下实现水柱的自动测量,势必要解决水柱与舰船目标共用线性通道问题,即舰船大信号抑制水柱小信号,以致水柱检测困难问题。
2.2 多目标检测下的目标稳定跟踪
单脉冲机扫火控雷达作为一种连续闭环跟踪体制雷达,通常只跟踪一批目标,而自动水柱测偏,要求雷达在跟踪目标舰船的同时,完成对多批水柱的测量。显然,在多批次水柱频繁更替检测中,保持对目标舰船的稳定跟踪是至关重要的。而水柱目标的特殊性,也决定了目标与水柱共用线性通道时,目标跟踪参数控制必须独立,否则可能造成目标舰船跟踪环路的不稳定。
2.3 水柱虚警
所谓水柱虚警,是指雷达回波中不包含弹着水柱而检测出弹着水柱的情况,即虚假的水柱被提取出来。这些假水柱可能是海杂波产生的,也可能是机内噪声造成的,无论是何种原因造成的虚警,都可能给指挥员的指挥决策带来重大影响。
2.4 水柱判定和输出准则
自动水柱测偏要求雷达在无操作人员干预条件下独立完成对水柱目标的检测,也就是说,雷达的测量输出完全依赖于执行特定的检测判定输出程序,这就要求设计人员对水柱目标这种特殊的信号形式要有清晰而准确的认识,要明确与之关联的各种条件参量,从而确定出尽可能贴合实际的水柱自动判定准则和偏差输出准则,从而保证雷达自动测偏的精度。
3 自动水柱测偏技术实现与分析
3.1 多种增益控制模式相结合
同一线性通道下的多目标检测,需要解决舰船强信号抑制水柱弱信号的问题,具体来说,是处理好多目标增益控制问题。采取水柱增益与舰船增益分别独立控制的方式,则可消除舰船大信号对水柱小信号的抑制作用,从而保证同一线性通道下不同强度信号的同步检测。
如图1所示,目标舰船区域采用单目标跟踪时的自动增益控制(AGC)方式,由舰船回波强度决定目标区域增益控制范围;水柱检测区域则采取固定增益控制方式,控制值应与水柱回波强度相适应,具体参数值依据水柱的实际距离、海情、海况等参数综合确定。
3.2 目标跟踪参数独立控制
单脉冲机扫火控雷达要实现多目标检测条件下的目标舰船稳定跟踪,必须保持目标跟踪参数控制的独立性。而实现对特定目标在距离上的连续自动闭环跟踪是跟踪雷达实现角度连续自动跟踪和其他参数自动闭环跟踪的前提和基础。在雷达变系数距离估值方程中:
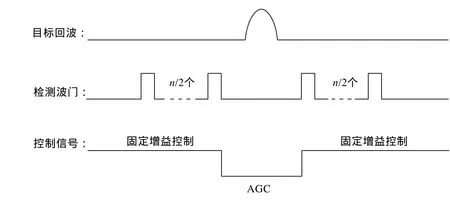
图1 增益控制模式示意图

式中,Rek为k时刻距离估值;Rpk为k时刻距离预测值;RΔ为距离测量误差值。
其中,α系数的取值随处理时间的增加而减小。环路伊始,为快速消除偏差,α的取值比较大,多在0.5~1之间。之后,为了环路的稳定性,α的取值逐渐减小,最后稳定在一个较小的值上。水柱出现之前,目标舰船已处于稳定跟踪状态,其α取值已经很小。水柱出现之后,水柱α系数取较大初值。此时,如果目标舰船与水柱共用同一α值,则舰船α值势必随水柱变化,从而影响目标舰船跟踪环路的稳定性。当舰炮连发射击时,α取值变化更加频繁,对目标舰船跟踪环路的影响也更大。因此,在自动水柱测偏条件下,单脉冲机扫火控雷达采用了目标α参数独立控制方式来保证目标跟踪环路的稳定性。
3.3 合理的水柱检测门限与多种降虚警数据处理手段相结合
水柱虚警率的高低在一定程度上取决于水柱的检测门限。然而,考虑到水柱的漏测率,又不可能通过一味提高检测门限的方法来减少水柱虚警。我们知道,水柱信号混杂于大量噪声信号当中,这些噪声包括机内噪声和海杂波,它们具有随机起伏的特性。同时,水柱信号受弹丸入水姿态、爆炸时刻,海情海况等条件的影响也是动态变化的。按照最佳信号检测理论,在预先不知道目标在一定条件下出现的概率,也很难确定一次漏测所造成的损失时,常采用奈曼-皮尔逊准则,而二级门限判决方法是一种实用且有效的雷达信号处理方法。考虑到水柱测偏功能使用应以尽可能减少虚警为原则,检测门限设计上采取了附加最低门限判断的二级门限判决方法。
如图2所示,第一门限采取最低检测门限r0与自适应门限r相结合的方式,即当实际噪声基底低于最低检测门限r0时,以最低检测门限r0为第一检测门限;当实际噪声基底大于最低检测门限,则以自适应门限r作为水柱第一检测门限。其中,最低检测门限r0是我们针对特定海情海况,通过测量无水柱杂波背景噪声基底的基础上确定的。第二门限值则按照k/N原则确定,即在水柱各检测单元对应的N个重复周期中,如果有k个量化脉冲超过各自的第一门限值,则判决为该检测单元信号存在。
确立合理检测门限的同时,数据分析处理环节也要采取必要的降虚警处理。譬如,弹丸击发至弹丸入水之前产生的虚警,即弹丸飞行时段的虚警,可以通过获取弹丸初速与目标距离,来估算弹丸击发到水柱出现的时长,并把该时长作为水柱数据禁止输出时间,来剔除此间虚警。

图2 二级门限判决示意图
3.4 合理的水柱判定准则及输出原则
水柱作为一种特殊的目标形式,其信噪比起伏有着区别于杂波信号的规律性,但是持续时间较短,起伏较快。因此,回波信噪比与回波持续时间成为自动水柱判定的重要准则。也就是说,当水柱检测单元中,回波信噪比超过既定检测门限,且该回波持续时间满足程序设定值时,才可以判定该回波为水柱回波。需要说明的是,水柱的持续时间并非一个固定值,它与弹丸入水姿态、海水深度、海情海况等多个参量相关,而判定程序中往往只能取一个经验统计值。当个别水柱持续时间长于程序设定值时,可能出现同一水柱二次检测问题。为此,确立了相邻水柱比对准则,即当后发水柱距离、角偏差信息与前发水柱一致或差别在一定范围内时,雷达认作一批水柱,不再输出,否则作为新水柱输出。
在偏差数据输出问题上,我们要清楚,雷达水柱测量的目的是获取弹丸落点,而非测量水柱本身,这就要考虑落点变化问题。受风速、风向等条件影响,水柱目标并非静态不动的,有可能在方位或距离上发生位移,从而引起落点测量偏差,如果将水柱偏差数据悉数输出,则可能影响指挥员的判断。为保证雷达输出的偏差数据与弹丸真实落点数据相匹配,确立了将雷达测量稳定后限定范围内水柱偏差数据统计作为水柱数据输出原则。
4 自动水柱测偏适用性分析
4.1 适用性验证分析
自动水柱测偏雷达可以在跟踪舰船目标的同时,对其跟踪波束内目标前后一定距离范围内的弹着水柱进行自动检测,克服了传统的多目标人工检测受人为因素影响大,水柱测量精度不易保证的缺点。实弹射击条件下的雷达水柱测量结果表明,雷达自动水柱测偏由雷达按既定程序自动完成,无需人工干预,检测速度快,弹着水柱落点测量精度高,系统主要作用区段内单发水柱检测概率大于90%。
文中水柱检测区域控制增益的选取,水柱检测门限的设定,均与雷达检测概率密切相关,而上述参数的确定取决于具体的海情海况条件。为保证雷达自动水柱测偏的适用性,需建立针对不同海域不同海情海况条件下的水柱增益控制数据库和水柱检测门限数据库。
4.2 局限性分析
目标(舰船)紧邻距离单元存在自动水柱检测盲区。该盲区受雷达发射脉宽,最小检测单元等条件限制。对于出现在雷达距离盲区内的水柱,雷达无法自动检测,只能通过火控台精A显及TV视频辅助观测,或辅以人工干预。
对于同一距离单元同时存在多个水柱的情况,受雷达最小可分辨单元限制,水柱回波为多个水柱的合成波,雷达无法区分,输出偏差为合成波偏差。雷达最小可分辨单元由天线波束宽度、发射脉冲宽度及多卜勒频带宽度决定的,可采用脉冲压缩技术加以改善。
5 结束语
本文探讨了自动水柱测偏在单脉冲机扫火控雷达上的技术实现,分析了自动水柱测偏的技术难点,深入探讨了雷达实现自动水柱测偏采取的关键技术,并结合射击测试,验证分析了雷达自动水柱测偏的有效性及适应性。实践证明,雷达自动水柱测偏克服了传统人工检测方法受人为因素影响大,测量精度不易保证等缺陷,提高了雷达的自动化工作水平及武器系统对海射击效率。该技术的实现与应用为火控雷达多目标检测提供了思路,对于相关领域的多目标检测也具有一定借鉴意义。
[1][美]Merrill I.Skolnik.雷达手册(第二版)[M].北京:电子工业出版社,2003.
[2]向敬成,张明友.雷达系统[M].北京:电子工业出版社,2001.
[3]王德纯,丁家会,程望东等.精密跟踪测量雷达技术[M]北京:电子工业出版社,2007.
