印度卫星导航系统发展及现状研究
2015-12-31叶礼邦闫京海乔会东耿宏峰
叶礼邦,闫京海,乔会东,耿宏峰
(中国洛阳电子装备试验中心,洛阳 471003)
0 引言1
卫星导航系统是关系到国计民生的重要设施,在军事、科研、经济和日常生活中发挥着重要作用,各国都在加大对卫星导航系统的开发力度[1]。印度为摆脱在导航领域对他国的依赖,也积极发展自己的卫星导航系统。目前,由印度空间局(ISRO)和印度机场管理局(AAI)联合组织开发的两个卫星导航系统:“GPS辅助型静地轨道增强导航系统”(GPS Aided GEO Augmented Navigation System,GAGAN)和“印度区域卫星导航系统”(Indian Regional Navigation Satellite System,IRNSS)[2]。
本文主要介绍印度GAGAN系统和IRNSS系统的最新研究进展情况,重点分析IRNSS系统的体系结构、信号样式、导航电文,分析系统的能力,最后介绍印度卫星系统的发展计划,为全面了解印度导航系统的发展取到参考作用。
1 GAGAN系统
GAGAN系统由ISRO与美国雷声公司共同开发,为用户提供GPS信息和差分修正信息,用于改善印度的GPS定位精度和可靠性,是一种GPS星基增强系统。GAGAN系统由空间段和地面段组成,体系结构如图l所示[3]。
空间段包含3颗搭载GAGAN载荷的GEO卫星,包括:2011年5月发射,运行在东经55°上的GSAT-8卫星;2012年9月发射,运行在东经83°上的GSAT-10卫星;以及尚未发射的GSAT-15卫星。卫星频率采用C波段和L波段,C波段用于卫星测控;L波段发送导航信号。为实现与GPS的兼容和互操作,频率采用和 GPS完全相同的工作频率,分别为L1:1575.42MHz和L5:1176.45MHz。
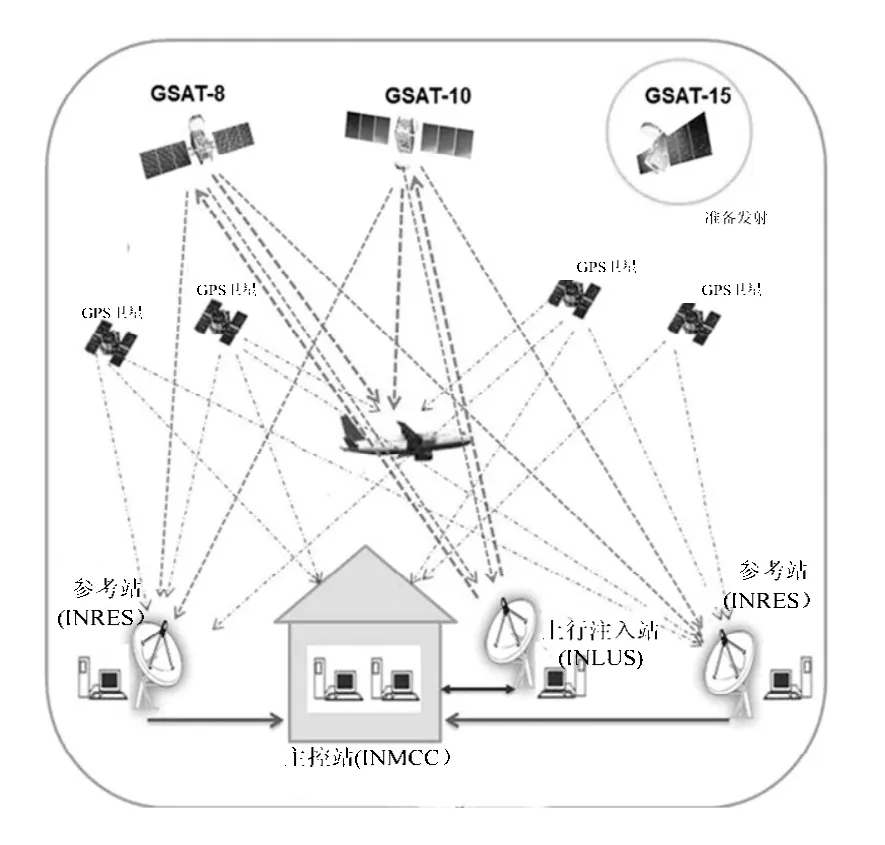
图1 GAGAN系统体系结构
地面段包括1个主控站、8个参考站、1个上行注入站及相关导航软件和通信链路组成。主控中心及上行注入站设在班加罗尔。目前两颗卫星的覆盖如图2示[4]。

图2 GAGAN信号覆盖区域
GAGAN系统建设包括技术验证(TDS)阶段和最后操作运行(FOP)阶段。TDS阶段主要完成系统指标分配、系统联调和在轨测试等内容,该阶段已于2007年8月完成。测试内容主要是系统精度指标,经测试,GAGAN系统水平和垂直定位精度≤7.6m(95%),差分信息完好性报警时间≤6.2s[5]。FOP阶段主要进行最后的集成并投入运行,且能对系统完好性信息和SOL服务进行论证。
2 印度区域卫星导航系统
在初步掌握卫星导航技术后,印度立刻开始筹划自主的卫星导航计划。2006年5月,印度正式批准了在GAGAN基础上发展“印度区域导航卫星系统”(IRNSS)项目。IRNSS系统包括7颗导航卫星。2013年7月1日,印度发射了首颗IRNSS-1A卫星,2014年4月4日和10月16日又接连发射了IRNSS-1B和 IRNSS-1C卫星,按计划,剩余的 4颗导航卫星将在2015年前部署完毕。届时,IRNSS系统可为各种平台的用户提供全天时全天候的实时定位、速度和时间服务。图3概括了IRNSS发展规划[6]。

图3 IRNSS发展规划
2.1 体系结构
IRNSS系统由空间段、地面控制段和用户段组成,体系结构如图4所示[7]。
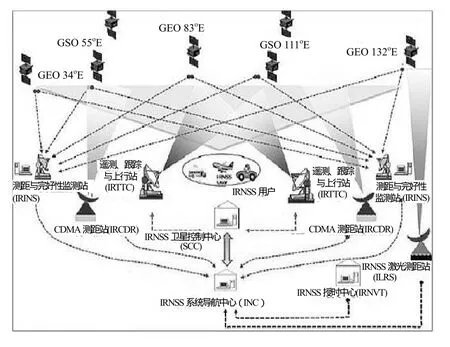
图4 IRNSS系统体系结构
2.1.1 空间段
(1)卫星星座
IRNSS的空间包括 3颗地球静止轨道卫星(GEO),4颗地球同步轨道卫星(GSO)。3颗GEO卫星分别定点于东经 34°、83°和 132°,4颗 GSO卫星处于两个轨道面上,星下点轨迹形成两个“8”字形,交点地理经度分别为东经 55°和111°,卫星轨道高度36000km。表1为J2000.0下卫星轨道参数。
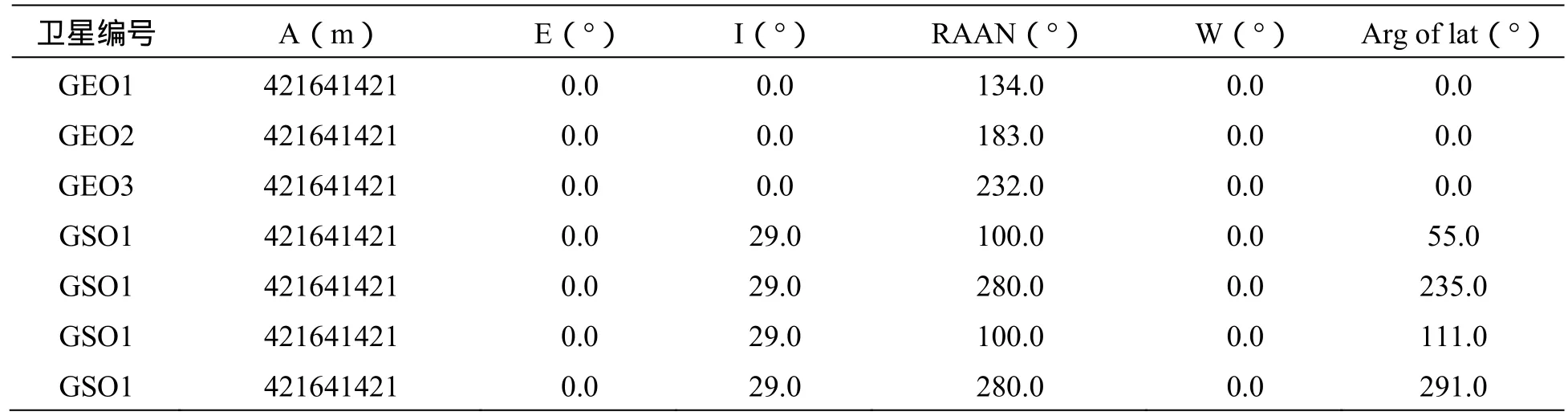
表1 卫星轨道参数
(2)导航卫星
为了便于控制状态和批量研制,7颗IRNSS卫星状态一致。IRNSS卫星平台的主要技术参数为[8]:卫星起飞重量1425kg,卫星干重641kg,其中有效载荷重量110kg;空间体积为1.58m×1.50m×1.50m;配备两个太阳帆板,输出功率1660W,一组90Ah锂离子蓄电池,有效载荷功率为900W;一台440N远地点发动机(轨道控制),12个22N推力器(姿态控制);三轴稳定零动量系统,利用太阳敏感器、星敏感器及陀螺确定卫星方向,利用反作用轮、磁力矩器及推进系统推力器作为姿态控制的执行机构;设计寿命10年。
2.1.2 地面控制段
IRNSS系统地面控制段负责维护和运行空间星座,印度区域导航卫星系统地面控制段组成及信息流如图5所示[9]。
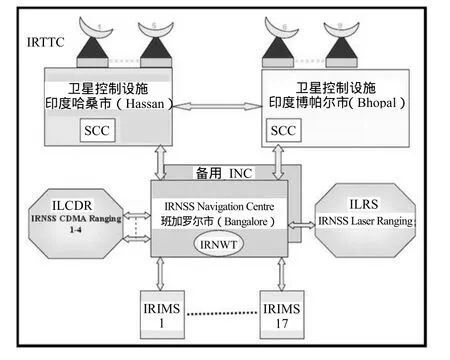
图5 IRNSS地面系统体系结构
主控中心MCC由航天器控制中心SCC和导航信息控制中心INC组成,是地面控制段的核心,负责计算并预估导航卫星的轨道位置,计算系统完好性,修正空间电离层和星载原子钟偏差,运行导航系统软件。位于卡玛塔克邦哈桑的飞行控制署负责控制导航卫星的轨道和姿态,完成卫星的轨道位置保持和相位保持。
16个测距和完好性监测站(IRIMS)以无线电双向测距为主、激光测距为辅,追踪和估计卫星的轨道,监控星座的完好性,并把所处理的信息传递给主控站。16个系统测距和完好性监测站中,大部分监测站位于印度境内的机场内,并与GAGAN系统监测站共用,监控星座的完好性,并把所处理的信息传递给主控站。利用区域增强技术,印度区域导航卫星系统能够获得更高的定位精度。
卫星遥测遥控及导航信息上行注入站 IRTTC负责监控卫星的健康状态,接收卫星遥测信号同时上行遥控命令,同时上行注入轨道参数、钟差、电离层及对流层修正系数等导航电文信息。
印度导航中心地面钟房的铯原子钟组和氢原子钟组联合生成印度区域导航卫星系统时间(IRNWT)。
2.1.3 用户段
用户段接收机包括单频和双频接收机两种。单频接收机使用L5或S频段,利用导航电文给出的电离层修正系数提高定位精度;双频接收机同时使用L5及S频段,利用实时修正电离层对导航信号的延时而获得更高的定位精度。
单频接收机和双频接收机既能接收SPS(专用定位系统)信号,也能接收 RS(限制/授权服务)信号。所有接收机除接收IRNSS信号外,也可以接收空间其他GNSS的信号,并且接收机都能够对空间卫星进行连续的跟踪,接收机的最小值为G/T为-27dB/K。
2.2 系统信号样式
IRNSS的导航原理与美国GPS类似,用户至少接收来自4个卫星信号进行定位。IRNSS卫星的信号参数如表2所示。
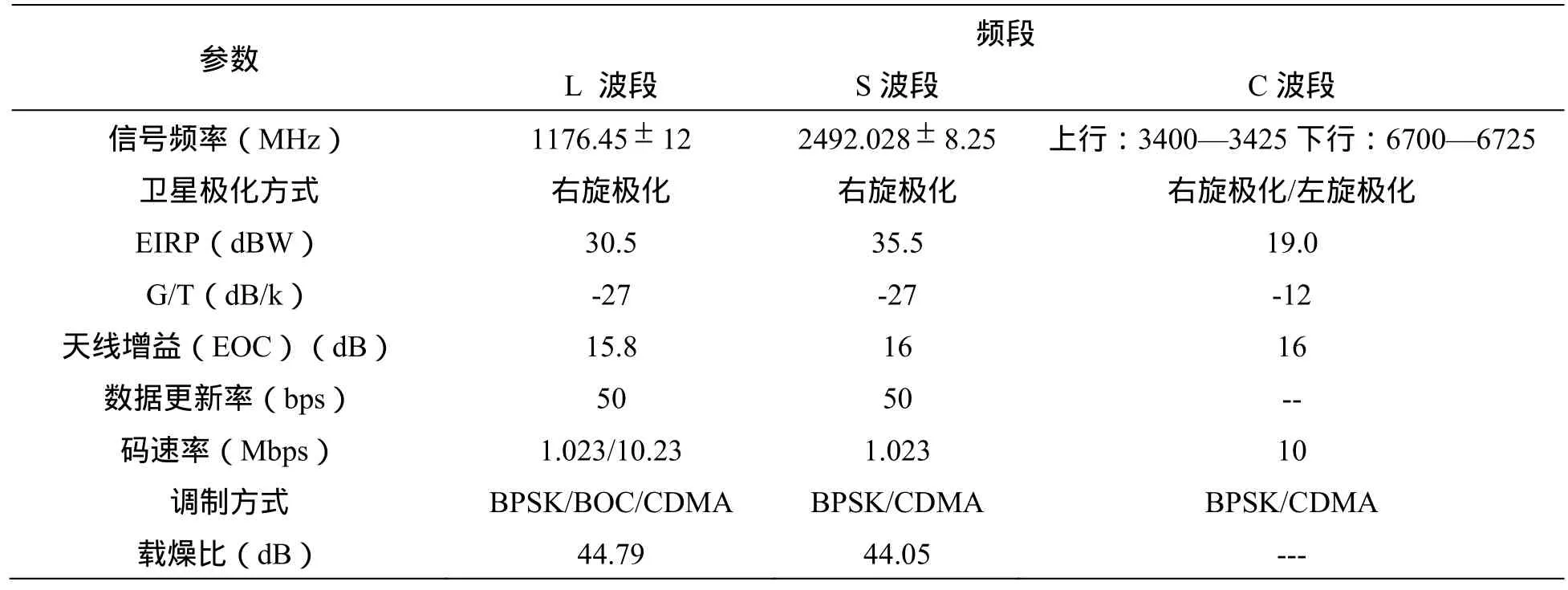
表2 IRNSS卫星信号参数表
IRNSS系统信号采用3个工作频段:C波段、S波段和L波段。其中,C波段主要用于测控,S波段和L波段主要为用户提供导航定位服务。标准定位服务和精密定位服务信息调制在S波段和L波段的L5上。政府授权用户服务信息只调制在L5频率上。S波段的导航信号由星上的相控阵天线发射,确保覆盖区域和信号。L5频段和S频段信号的功率谱密度如图6所示[10]。
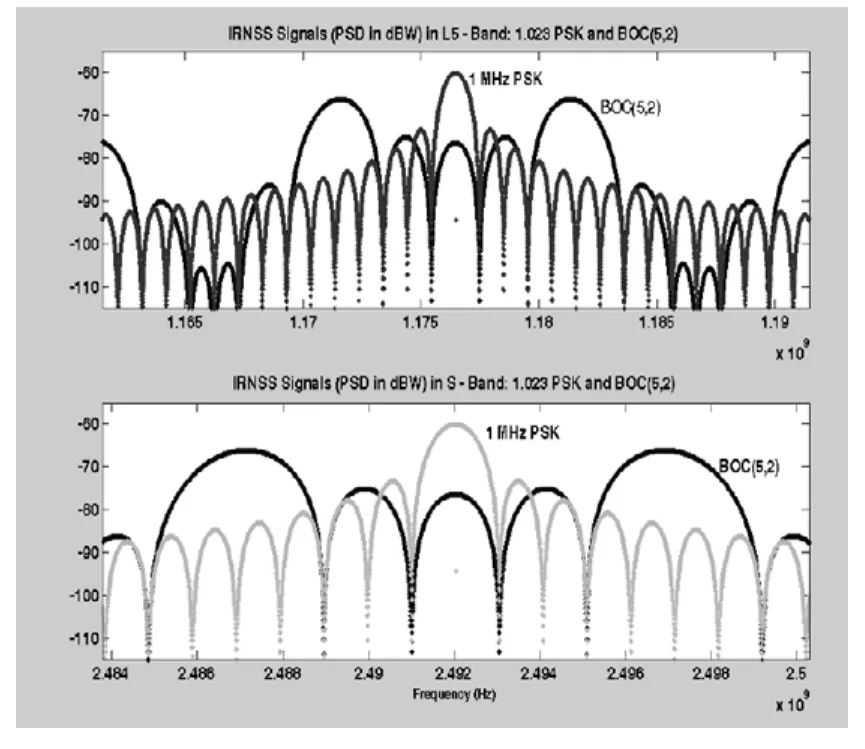
图6 L5频段和S频段信号的功率谱密度
2.3 导航电文
IRNSS的导航电文由帧、子帧组成,其中一个帧包含4个子帧,每个子帧的长度为292 b,经过FEC编码后的长度为584 b,加上16 b的同步头,每个编码后的子帧长度为 600 b,一个主帧的长度为2 400 b,按照50 b/s的符号速率传输,传输一个主帧所需要的时间为48 s[11]。4个子帧中,第1、2子帧为固定格式,用于传输历书和钟差参数,第3、4子帧为信息格式。
2.4 系统能力
(1)业务范围
IRNSS系统提供的业务包括:
①为陆地、航空和海洋用户导航;
②灾害管理;
③陆地车辆追踪和海洋船队管理;
④协同移动通信;
⑤精密授时;
⑥地图和大地测量数据记录;
⑦陆地导航信息援助;
⑧车辆语音、可视导航。
(2)覆盖范围
根据印度空间研究组织ISRO的设计方案,印度区域卫星导航系统IRNSS的7颗导航卫星完成组网后,将能为印度及其边境周边1500~2000km范围内的用户提供全天候、全天时的精确定位、导航及授时服务,系统覆盖范围在东经 40°E~125°E,南纬30°~北纬45°之间。
(3)定位精度
印度区域卫星导航系统 IRNSS系统的定位精度在印度洋区域优于20m,在印度本土及邻近国家定位精度优于10m,也比GPS民用单频接收机15m定位精度在高很多[8]。系统采用局域增强后,能够进一步提高用户定位精度。
3 结束语
根据ISRO的计划,IRNSS系统将来主要围绕以下两个方面开展建设。
一是建成覆盖印度全境的“区域卫星导航系统”。ISRO计划于在2015年前将完成所有的7颗IRNSS卫星。根据设计方案,这7颗导航卫星完成组网后,将能为印度及其边境周边1500km范围内的用户提供精确定位、导航及授时服务。
二是从“区域卫星导航系统”向印度版“全球卫星定位系统”迈进。印度计划在完成IRNSS后,再发射大约 10颗导航卫星,最终形成印度版全球卫星定位系统。
IRNSS系统是印度自主建设的区域卫星导航系统,同时也能与GPS、GALILEO等兼容。随着IRNSS系统发展计划的推进,不久的将来,印度将拥有世界上第六套卫星导航系统,跻身世界航天大国的行列。
[1]李保柱.卫星导航系统国内外发展新进展[J].通信导航与指挥自动化,2001,4:60-65.
[2]高为广,陈金平,王楠.印度卫星导航系统最新进展[J].全球定位系统,2008,33(1):42-45.
[3]Ganeshan A S.GAGAN:Statue and Update[J].Coordinates,2012,VIII(9):1-5.
[4]陈亮.印度空间信息系统发展与特点浅析[J].外军信息战.2013,2:24-29.
[5]陈金平,潘艳,高为广.日本和印度区域卫星导航系统进展与分析[J].导航,2008(1):6-9.
[6]张雪松.攀比心态下的“大跃进”-简析印度区域卫星导航系统[J].舰船知识,2013,9:46-49.
[7]Parimal Majithiya.Indian Regional Navigation Satellite System [J].indidegnss.2011(1):40-46.
[8]李晓梅.印度区域卫星导航系统IRNSS特点分析(上)[J].卫星与网络,2013(7):60-65.
[9]李晓梅.印度区域卫星导航系统IRNSS特点分析(下)[J].卫星与网络,2013(8):52-58.
[10]张春海,赵晓东,李洪涛.印度卫星导航系统概述[J].电讯技术,2014,54(2):231-235.
[11]T.Neetha,A.Kartik,S.C.Ratnakar,A.S.Ganeshan.The IRNSS Navigation message[J].Journal of Spacecraft Technology,2011 21(1):41-51.
