基于日地运行理论的太阳运动模拟平台的设计
2015-12-31太原科技大学电子信息工程学院张巧娟李虹刘立群张国梁
太原科技大学电子信息工程学院 ■ 张巧娟 李虹 刘立群 张国梁
0 引言
随着现代社会的快速发展,化石燃料的大量消耗引发了一系列的环境问题,如臭氧层破坏、酸雨、雾霾等,这些问题已影响到人类的可持续发展。太阳能所具有的清洁无污染、分布广泛、安全、环保等优点,已成为新能源开发与应用的热点领域,太阳能必将在未来的能源结构中占据重要地位。
太阳能的主要利用方式之一是光电转换,而提高其利用率的方法之一就是进行太阳位置跟踪。真实的太阳运动比较缓慢,这使得跟踪太阳的相关实验需花费较长时间,并且跟踪在短时间内效果不是很明显。众所周知,太阳每天东升西落,晚上不能进行相关实验,而且不同纬度的地区在一年中不同的季节和时间段,太阳在天空中的位置不同,准确来说,在一年中不存在完全相同的运行轨迹,故短时间(一年以内)内不能进行重复性实验。真实太阳的这些不利之处间接地使相关实验提升了难度,所以搭建一套太阳运行位置的模拟平台是非常必要的。
1 太阳模拟平台控制方法
常用的太阳模拟平台控制方法主要有两种:匀速控制方法和时空控制方法[1]。
1.1 匀速控制方法
地球绕着地轴自西向东自转,该方法假定其转动的速度固定,自转一周为一天即24 h,并将一天当中的太阳运行角度平均化,即太阳在方位角上以15°/h的速度匀速运动,24 h运行一个周期[1]。可将时间和角度按比例缩小,通过控制器使平台上的光源能匀速运动来模拟太阳的运行弧线,从而达到模拟太阳的运行轨迹[1]。该方法的优点是程序比较简单、容易实现、对机械结构要求较低、成本低,但精度不高、误差较大[2]。
1.2 时空控制方法
根据日地运行理论可知,太阳运行轨迹与年份、季节、具体的时间及地理位置等许多复杂的因素有关。所以将这些因素之间的关系编程存到控制器中,通过程序查表并计算出太阳的高度角和方位角,将模拟平台需运行的角度计算出相应动作数,由控制器发出指令,通过水平和垂直方向上的电机动作,使模拟光源到达指定位置。按照该方式系统连续动作就能模拟太阳运行曲线。该方法程序设计比较复杂,但精度高、误差小,同时机械结构相对复杂,精度要求较高。
国内外许多相关的模拟平台均采用匀速控制方法,该方法程序简单,但实现控制的精度较低;目前比较流行的是采用时空控制法。为了能更加精确地模拟出任意地区的太阳相对于地球表面的运行轨迹,根据设计的需要,故本文采用时空控制方法。
由于时空控制方法属于开环系统,结构较简单,但却存在抗干扰能力弱的缺点。为了提高系统的稳定性,本文在步进电机上安装旋转编码器,用来测电机实际所转的步数,反馈给控制器形成闭环系统来减小误差。
2 太阳运动模拟平台机械结构设计
本文要设计一个太阳运行模拟平台,该平台为一个二维系统,包括水平方向和垂直方向。其中水平方向上的运动模拟太阳在一天内从东方运动到西方的过程,即方位角的变化;垂直方向上的运行模拟太阳一天中早上从地平线升起,晚上又降到地平线的过程[3-4],即高度角的变化。从数学角度上,水平方向和垂直方向的两个运动就可合成一天太阳在天空中的运行轨迹[4]。
2.1 功能要求
太阳运动模拟平台的设计目标是在一个长1.2 m、宽0.04 m的支架上设计一套两个方向的能模拟日地运行轨迹平台,该平台能实现在水平方向上左右运动,垂直方向上升降运动;但水平方向和垂直方向不是相互独立的,而是能同时运动,两个方向上的运动轨迹合成近似于太阳运行的弧线,最终达到模拟日地运行轨迹的目的[4]。
2.2 结构设计方案
模拟平台的底座以4 mm的角钢为材料,这样可以保证有足够的支撑力。水平方向的运行导轨和垂直方向的运行平台安装在底座上,可以保证模拟平台的稳定性。实际搭建过程中,轴承座、光轴支架需其他物体垫高。这样做的目的在于:一是为了让水平方向上所有器件的中心在同一个水平面上;二是从受力分析来看,有利于同步带上的拉力尽可能全部作用在水平方向上。如果不平行,会与水平方向形成一个角度,拉力就会分解在水平方向和垂直方向上,这样水平方向上的拉力就会减小。
机械系统主要由两个平台组成,一个是水平方向,一个是垂直方向。水平方向上行程较长,故采用光轴作为运行导轨,平台下方安装了4个光轴滑块,可有效减小摩擦。水平方向的传动机构采用同步轮转动带动同步带的方式,动力来自于所选的步进电机。运行导轨的两端分别加上一个限位开关,这样可控制有效行程,同时也起到保护装置超出运行范围的目的。
选择同步带作为传动方式的优点:一是该方式主要是靠同步带齿和同步带轮之间的啮合实现传动,两者之间没有相对滑动,传动比值大且恒定,具有缓冲、减振功能,噪音较小,适合精度较高的控制系统;二是同步带为聚氨酯橡胶材料,皮带轮采用铝合金材料,它们不易被腐蚀;三是安装和维护简单,且成本低。不选择链传动和齿轮齿条传动的原因是它们传动的冲击振动较大,回程间隙较大,使得系统的精度降低 。
为了让垂直方向和水平方向同时运动,将垂直方向的平台直接安装在水平装置上。因为垂直方向的平台行程短,故采用精度较高的滚珠丝杆。用带蜗轮蜗杆减速器的步进电机带动丝杆转动,将模拟光源放置在固定有螺母的平台上。为了使螺母不随丝杆做圆周运动,在其侧面加上一块工业铝型材进行固定;为了保证螺母会上下运动,尽可能地减小螺母与铝型材之间的摩擦力,铝型材和平台之间也采用光轴导轨和滑块,这样可有效地保证机械结构的精度。同样,垂直方向上也安装两个限位开关来控制平台上下运动的范围。平台设计结构的三维效果如图1a所示,实物如图1b所示。
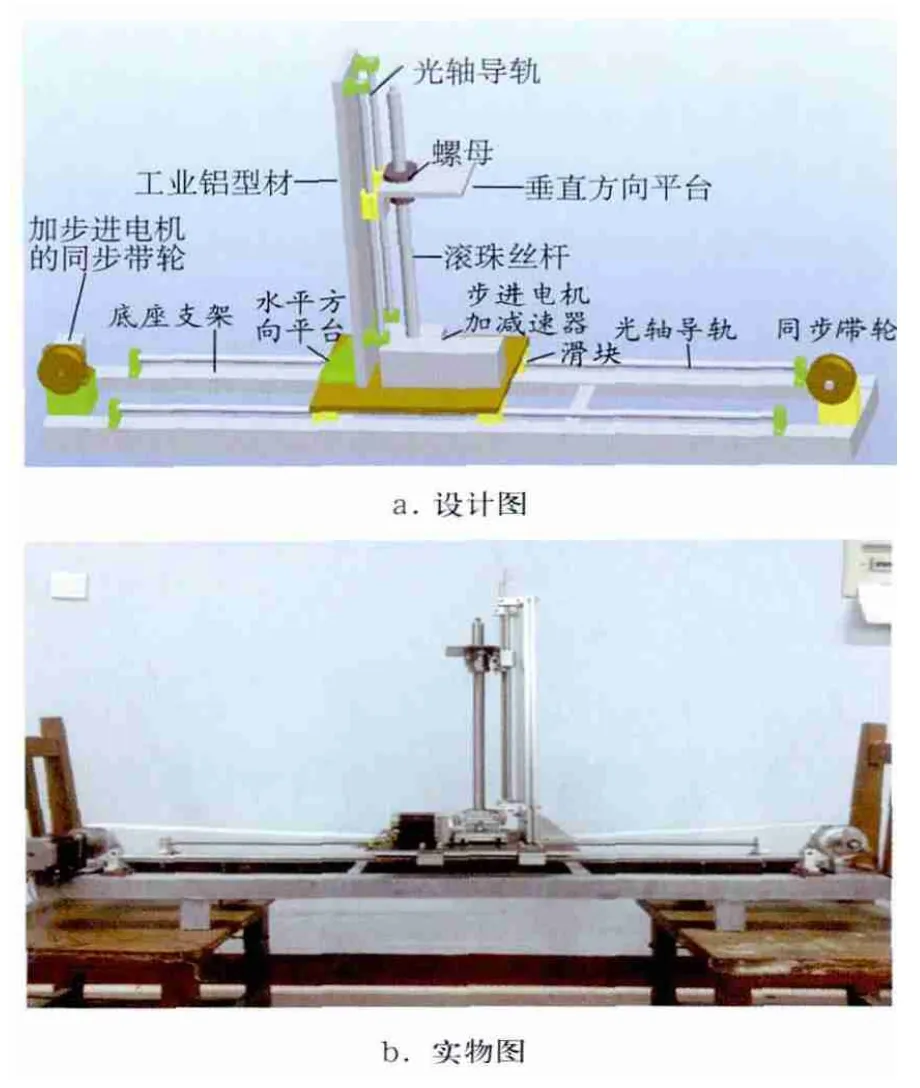
图1 太阳运行模拟平台
选择光轴作为导轨的优点:光轴为标准零件,平行向和垂直向的稳定性好,而且还可提高系统的精度。选择滚珠丝杆作为传动方式的优点:选用不锈钢材料加工,摩擦力小、结构紧凑、传动精度高,同时还有防锈功能[5]。
2.3 位移控制精度计算
所选同步带节距为14 mm,同步带轮齿数为20,步进电机最大细分数为16,蜗轮蜗杆减速器的减速比为1:1(即无减速器)。则可根据式(1)计算出水平方向直线位移控制精度的理论最高值为14 mm×20/(1×16)=17.5 mm。该精度能满足水平方向上的要求。
垂直方向直线位移控制精度=

垂直方向的滚珠丝杆导程为400 mm,蜗轮蜗杆减速器的减速比为1:5,根据式(2)可求出垂直方向直线位移控制精度的理论最高值为400 mm/(5×16)=5 mm。
3 模拟平台控制系统的设计
3.1 控制系统结构
太阳运动模拟平台主要由ATmega16单片机控制模块、液晶显示模块、键盘输入模块、时钟模块、电源模块、状态模块和执行机构组成[6]。它不仅可执行预定的程序,运行具体某一天太阳轨迹,具体年月日可由显示模块读出;还可通过键盘模块输入想要观看的具体时间的太阳轨迹。控制系统的原理框图[7]如图2所示。
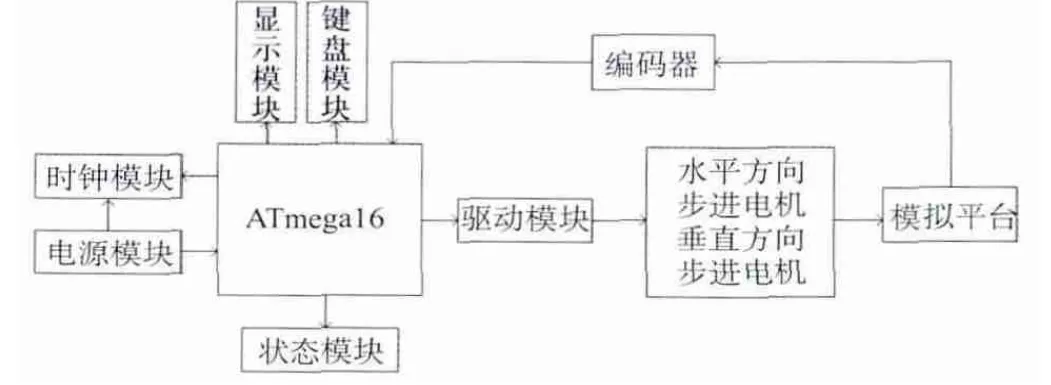
图2 控制系统原理框图
3.2 各模块的功能简述
3.2.1 时钟模块
该模块采用DS1302时钟芯片,为软件的设计提供计数计时的功能。
3.2.2 显示及键盘模块
显示模块采用的是LCD1602液晶显示,可显示输入的年月日,当时具体的时间;键盘模块则采用数字键盘,为人机接口,方便输入需要设定的时间。
3.2.3 驱动模块
设计的PWM模块可产生所需脉冲数,将其输入到步进电机驱动器中,来控制步进电机的转动。
4 日地运行轨迹计算方法
根据日地运行理论,太阳相对地球的运行轨迹是一个圆周形。在北半球(除北极外),只有春分和秋分这两天太阳是从正东方升起、正西方落下。太阳在天球上的位置常用的表示方法有赤道坐标系和地平坐标系。采用地平坐标系对太阳跟踪器的机械设计要求较低,所以本文采用地平坐标系。
4.1 赤道坐标系
在该坐标下,太阳的具体位置Sθ可由时角ω和赤纬角δ来确定。
4.1.1 时角ω
以太阳在正午的时间为原点0,则上午为负角,下午为正角。时角大小为:

其中,Ts表示每天的具体时间,范围为0~24 h。
4.1.2 赤纬角δ
日地心连线与赤道面的夹角每天都处于变化中,这个角就是赤纬角。赤纬角的大小与地理位置无关,仅与当天在一年中的日期有关,故地球上任何一点的赤纬角都相同。
用Cooper的方程可得到,赤纬角的近似计算式[1]为:

其中,N为一年中的日期序列号,从每年的1月1日开始,元旦当天N=1,春分日为N=81,12月 31日N=365。
4.2 地平坐标系
在该坐标系下,通常用高度角和方位角这两个坐标来确定太阳的具体位置。在同一时刻,地球上不同地理位置的高度角和方位角均不同。
4.2.1 高度角 αs
高度角与天顶角的关系为:

式中,θz为天顶角,是指太阳光线与地平面法线之间的夹角。
高度角、天顶角和纬度、赤纬角及时角的关系为:

4.2.2 方位角 γs
方位角、赤纬角、高度角、纬度及时角的关系为:

根据式(6)和(7)可确定太阳在天空中的具体位置,由此可具体的定位出模拟平台每个时间需要运行到的具体位置。
4.2.3 日出、日落的时角ωs
日出、日落时太阳高度角为0°,由此可得:

由于 cosωs=cos(-ωs),则有:

其中,ωsγ为日出时角;ωss为日落时角,以度表示,负值为日出时角,正值为日落时角。
4.2.4 日照时间N
根据日地运行理论,地球每小时自转15°,故得出日照时间表达式为:

根据式(10)可得出太阳一天中的日照时长,可为模拟平台的运行时间提供依据。
4.2.5 日出、日落时的方位角
日出、日落时太阳高度角αs0=0°,则cosαs=1,sinαs=0,则有:

根据式(11),可得出不同季节每天太阳日出、日落时的具体位置,可根据公式来确定模拟平台的起始位置。
根据上述所有公式,可计算出某年某月某日具体到某时的太阳的运行位置,也可模拟具体某一天的太阳运行轨迹。目前常用的是将一天太阳的运行角度平均化,每小时转15°。真实的日地运行轨迹却并不是这样的,在早上和晚上两个时间段太阳运行的速度要比中午时间段慢,以下仿真结果可验证这点。
根据式 (3)、(4)、(6)~(8)、(10),可编写 C语言程序。在Matlab中进行仿真,分别得到某月的太阳高度角和方位角随时间的变化趋势。图3~图5分别为太原地区(经度为112°53333′,纬度为 37°86667′)、哈尔滨地区 (经度为 125°42′,纬度为 44°04′)、广州地区 (经度为 113°17′,纬度为23°8′)在2000年8月1日的太阳高度角和方位角变化相关仿真图。
图3为不同地区太阳高度角和方位角在一天中的整个变化趋势,从图中可知不同地区同一天的日地运行轨迹是不同的。其中纬度差距越大,曲线的差距也就越明显。图中时间T的显示范围是从早上5:00到晚上20:00,高度角的显示范围为[-10,90],方位角的显示范围是[-100,100]。其中,红色实线代表太原地区,蓝色实线代表哈尔滨地区,蓝色间断线代表广州地区。
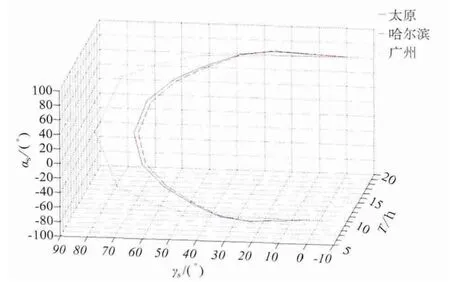
图3 不同地区的太阳高度角和方位角的三维仿真图
图4是不同地区高度角和时间的关系曲线。从图4可知,正午12:00太阳的高度角达到最大值,早上高度角基本是从0°开始,然后约平均以 10°/h 的速度递增到 10:00,10:00~11:00的速度有所减小,11:00~12:00的速度最小;下午的高度角基本以正午12:00为中心轴,与上午呈左右对称关系递减。广州的高度角5:00时处于规定0°之下,故为负值。由于广州是三者中的低纬,故该地区的变化速率较其他两个地区较大,早上8:00前,高度角一直低于其他地区,从8:00开始直到16:00,高度角一直大于其他地区。由于变化速率大,所以广州地区过了16:00,高度角降幅比其他地区大。由于哈尔滨处于三者中的最北方,广州处于最南方,太原居中,故一天之中太阳高度角从小到大的顺序为:哈尔滨<太原<广州。哈尔滨和太原的纬度相差较小,故两个地区的曲线变化差距较小。
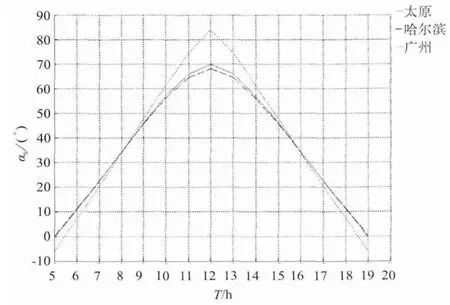
图4 不同地区太阳高度角和时间的关系曲线图
图5为不同地区的方位角和时间的关系曲线。图中0:00是正南方向,正值一侧为西方,负值一侧为东方。从图5可知,太原和哈尔滨早上太阳5:00~10:00太阳的方位角一直变化较缓慢;5:00~8:00 高度角呈减小趋势;8:00~10:00又开始上升;10:00~17:00这段时间太阳方位角变化幅度较大,基本成指数形式增长;17:00后变化趋势基本和5:00~10:00成左右对称关系。此外广州5:00到接近10:00时变化速率相对其他两个地区较小,10:00~16:00时变化速率明显远大于其他地区,说明广州一天中太阳方位角变化最大的在10:00~16:00之间,其余时间变化速率较小。
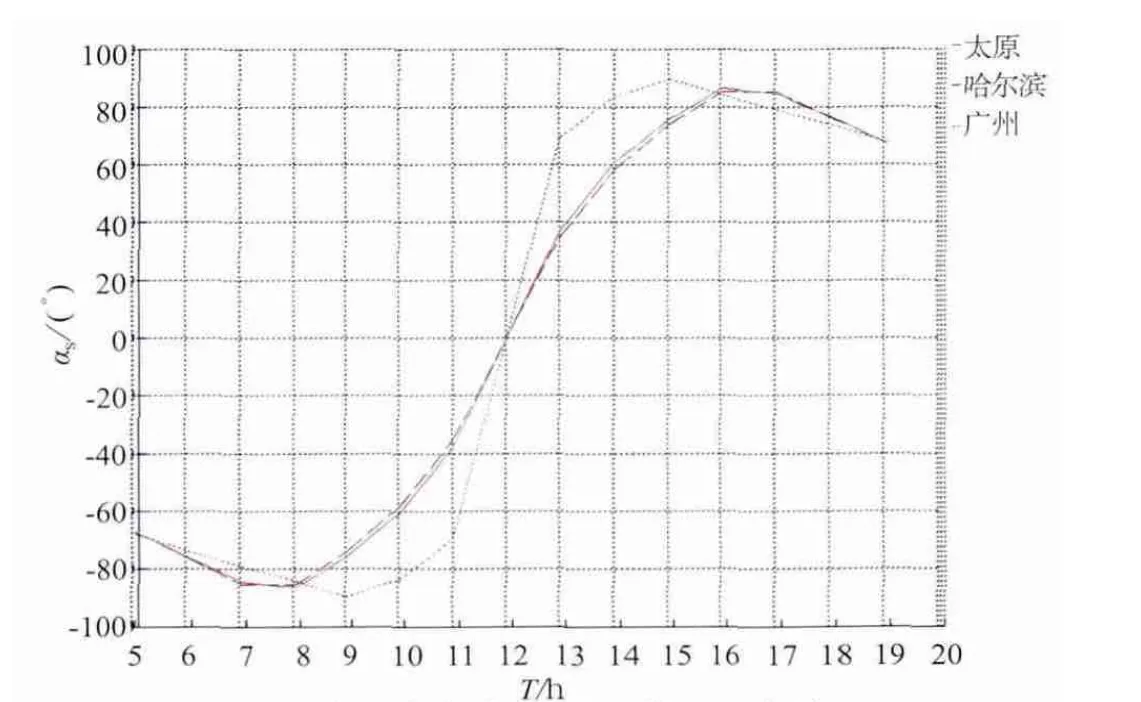
图5 太阳方位角和时间的关系曲线图
该仿真图验证了日地运行轨迹是有快慢之分的,如果将一天中的太阳运行角度平均化,产生的误差较大。所以本文的程序设计将早晚相邻两次程序运行的时间间隔设的长一些,即频率低;因为太阳运行的角度变化不是很大,中午时间段太阳运行得较快,所以相邻两次运行时间间隔设置较短,即频率大些。这样的设计误差较小,而且也更加合理。图6为8月同一天不同地区太阳高度角和方位角的关系图。
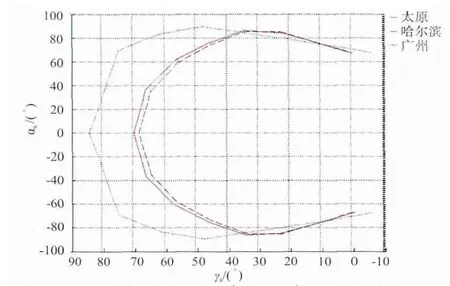
图6 不同地区的太阳高度角和方位角的关系曲线图
5 系统的软件设计
日地运行轨迹是通过研究日地运行理论,得出确定太阳位置的方法。根据太阳位置的数学公式,用C语言编写相关的控制程序,按照预定的程序分别控制水平方向和垂直方向的步进电机,使其模拟太阳的轨迹进行运动[7]。具体方案为:
1)系统启动后,Atmega16先进行初始化,得到当地的经度和纬度,以及当天的具体年月日时间。
2)根据初始化的信息计算出时角ω和赤纬角δ,通过式(6)和式(7)可计算出这个时间的太阳高度角和方位角。
3)单片机通过程序计算将角度转化为相应的脉冲数,通过步进电机驱动器驱动电机运动[8]。
4)对电机转动次数进行计数,如果达到设定值,则由程序进行误差修正;如果未到达设定值,则返回继续进行计数。
5)误差修正后延时,根据编码器提供的数据判断电机是否出现失步,如果没有失步,则程序复位;若失步,则执行子程序,由失步数计算需要补充的脉冲数,驱动电机运动。日地运行轨迹程序流程图如图7所示,子程序流程图见图8。
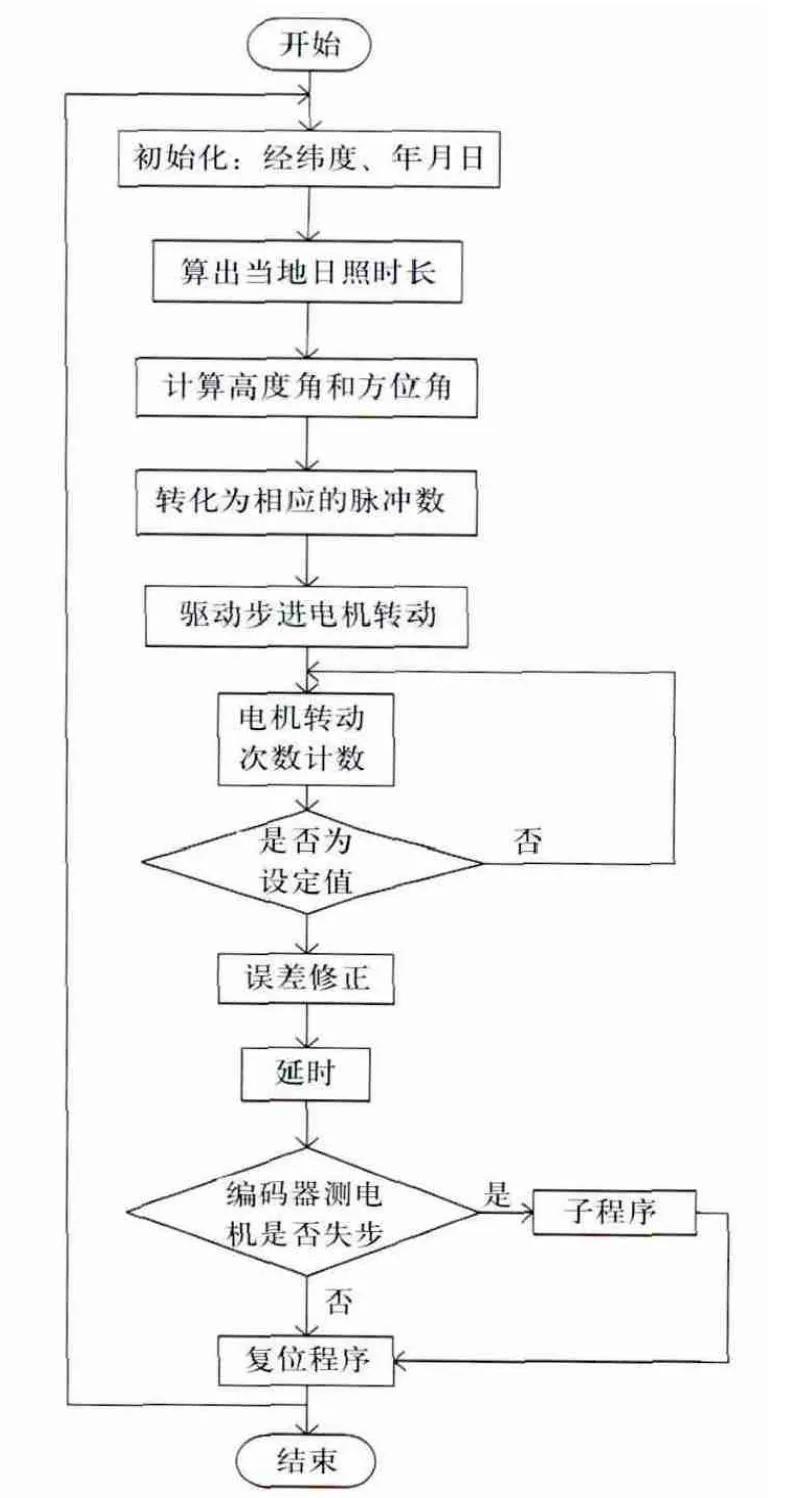
图7 日地运行轨迹主程序流程图
图8 子程序流程图
6 结束语
本文介绍了一种基于日地运行轨迹的太阳运行模拟平台软硬件设计。该系统能模拟一天当中太阳运行轨迹,为相关的跟踪太阳实验提供了一个良好平台。本文对该平台的机械结构进行了设计及选型,并计算出了机械结构的理论精度。控制系统以ATmega16为控制器,计算出太阳的高度角和方位角,转化为相应的脉冲数传给步进电机驱动器,由电机转动分别带动同步轮、滚珠丝杆,最终模拟出日地运行轨迹。程序中有误差修正,构成了闭环系统,保证了系统的稳定性,使该系统具有更好的稳定性和可靠性。该系统相较于同类产品,成本低、性价比高,具有很好的应用前景[7]。
[1]王淼,王保利,焦翠坪,等. 太阳能跟踪系统设计[J]. 电气技术,2009,(8): 100 - 103.
[2]廖锦城. 计算机控制双轴太阳跟踪系统及其偏差检测[D].武汉理工大学,2008.
[3]卢连成,刘占卿,周旭,等. 太阳辐射模拟系统可升降式灯架机构[P]. CN101806435A,2010-08-18.
[4]冯黎成,杨天虎. 太阳能教学实训装置的研发——模拟太阳升降跟踪控制实验系统[J]. 内蒙古教育(职教版),2012,(11):34 - 35.
[5]汤斌,武海波,胡国良,等. 多自由度位移机构的设计[J].计测技术,2008,(5): 29 - 32.
[6]胖莹,王振臣,冯楠,等. 太阳能智能追光装置设计[J].水电能源科学,2011,(8): 207 - 210.
[7]耿其东,李春燕. 双轴式太阳跟踪装置控制系统的研究[J].机械与电子,2011,(3): 53 - 56.
[8]汤世松,舒志兵. 双轴伺服太阳能跟踪系统的设计[J]. 自动化仪表,2011,(2): 49 - 51.
