ZigBee 技术在STP中的应用研究
2015-12-30徐庆标
徐庆标
无线调车机车信号和监控系统 (以下简称STP系统)的推广应用,实现了对调车作业过程的动态监控,有效提高了调车作业的安全防护水平。但对于作业机车的实时定位,仍缺乏获取停留车位置的技术手段,影响了系统的控制进度和连挂作业自动防护功能的实现。为了实现对作业机车的位置跟踪,只能通过地面点式应答器获取作业机车的初始位置,并根据车站联锁信息进行调车进路跟踪;为了能确定停留车位置,保留了存放作业时刻的大致位置,而无法确定非STP系统存放的停留车位置。即便如此,仍无法克服因通信时延、钩确认时机不同等造成的定位误差。为此,调车监控模式和非调车监控模式才应运而生。ZigBee技术将全面解决现有STP系统的车列定位问题,克服因位置未知带来的需初始入网注册才能进入调车监控模式、距停留车距离未知时无法自动连挂等问题。
1 构建基于ZigBee的Mesh定位网络
ZigBee技术是一种无线网络技术,其特点是近距离、低复杂度、自组织、低功耗、低数据传输速率、低成本等。
1.1 STP系统及相关设备
STP系统由地面设备和车载设备二大部分组成,如图1所示,其中地面主机和车载主机分别为核心设备。地面主机与计算机联锁系统相连,获取车站联锁信息;车载主机与LKJ主机接口,接收机车工况,并发送车站联锁信息和控车信息等;平调设备中的机控器与LKJ主机接口,传送调车手持台的调车指令。此外,与计算停留车位置相关的设备还有成对的智能铁鞋,分别设置在停留车两端最外侧车轮和钢轨之间,是车辆防溜的固定装置。
1.2 基于ZigBee技术的Mesh网络
为实时定位作业机车和停留车位置,需构建覆盖整个作业站场的、以ZigBee模块为节点的无线网络。网络中的节点有车载主机、平调手持台、智能铁鞋和站场规定区域内布置的参考节点。除参考节点外,其他3类节点的位置都需要根据参考节点的已知位置坐标进行计算。
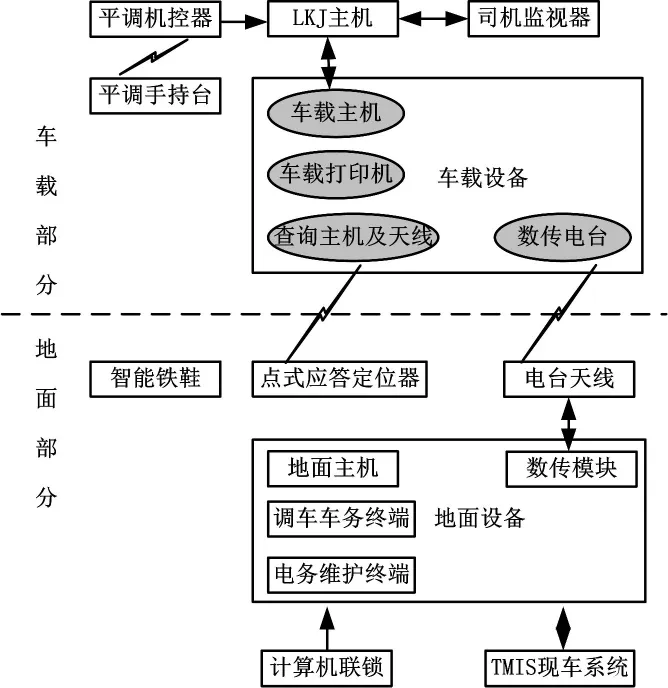
图1 STP系统及相关联设备组成框图
ZigBee网络中有3种节点类型:网络协调器、网络路由器和网络终端节点。其中网络协调器是必不可少的,车载主机、平调手持台、智能铁鞋和参考节点均集成有全功能的ZigBee定位模块,车载主机将作为网络协调器或网络路由器,其他设备将作为网络路由器。
ZigBee网络有3种拓扑结构:星形网 (Star)、树状网 (Cluster-tree)和网状网 (Mesh)。Mesh网络与传统的点到点网络相比,能实现节点间数据传输的多链路选择性,有更大的覆盖范围、很强的自愈能力以及更高的可靠性和冗余性。根据STP系统中各设备在调车作业站场内的分布特点,并兼顾无线网络全站场覆盖的需要,将作业站场按咽喉区进行划分,分别构建上行咽喉区Mesh网和下行咽喉区Mesh网:
1.在咽喉区里,首次上电运行的车载主机作为网络协调器,其后运行的车载主机、平调手持台、智能铁鞋和参考节点作为网络路由器,加入网络时根据检测到的信道能量大小选择父设备,父节点可能是协调器,也可能是路由器。
2.在现有点式应答定位器和发车信号机附近的道岔转辙机,或就近的线缆盒内布置参考节点,如咽喉区跨度较大,可在咽喉区中部位置再增设若干参考节点,确保远离网络协调器的参考节点能通过邻近的参考节点接入网络。
3.当本咽喉区作为网络协调器的车载主机跨过股道,进入另一咽喉区时,解除与各网络节点的关联,或作为网络协调器重新构建另一咽喉区Mesh网,或作为网络路由器接入另一咽喉区Mesh网;同时本咽喉区中作为网络路由器的车载主机将成为网络协调器,重新构建本咽喉区Mesh网。
4.当本咽喉区作为网络路由器的车载主机跨过股道,进入另一咽喉区时,解除与本咽喉区Mesh网的关联,作为网络路由器接入另一咽喉区Mesh网。
上行咽喉区Mesh网络结构图如图2所示,矩形框图表示车载主机网络协调器,椭圆形框图表示网络路由器,框中的 “主”、“铁”、“手”、“参”分别表示车载主机、智能铁鞋、平调手持台和参考节点对应的网络协调器或路由器。
为延伸单个网络节点无线传输距离,减少Mesh网络中参考节点数量,可以为ZigBee模块增加功率放大模块,使传输距离由传统的不足80m提高到1km左右,以更好地满足现场应用需求。
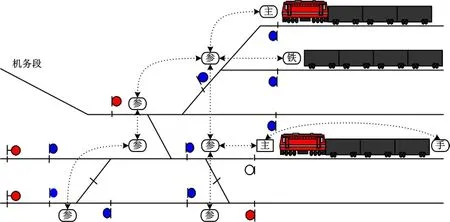
图2 上行咽喉区Mesh网
2 基于RSSI测距模型的定位算法设计
基于距离的定位算法,就是要尽可能准确地获得节点间的距离。ZigBee模块内嵌有基于RSSI的硬件定位引擎,可通过输入环境参数和参考节点的坐标,输出待定位节点的坐标,但定位精度不足,缺乏灵活性。基于RSSI测距模型的定位算法,将借助ZigBee模块提供的RSSI值,由计算能力强大的车载主机实时收集大量的参考节点RSSI值,计算出待定位节点的坐标。
2.1 RSSI测距模型和定位基本原理

式中,A表示相距1m处接收到的RSSI值,以dB为单位;n为路径损耗指数,用来描述信号强度随距离增加而递减的速率,依赖于无线通信外部环境。
ZigBee模块可直接从接收到的信息中获得RSSI值,根据 (1)式推算出信息发送端和接收端间的距离d。
在一个二维空间中,只要知道待定位节点到3个参考节点间的距离,就能计算出待定位节点的坐标。假设3个参考节点的坐标分别为 (X1,Y1)、(X2,Y2)和(X3,Y3),待定位节点的坐标设为(X,Y),待定位节点到3个参考节点的距离分别为d1、d2和d3,根据二维空间距离计算公式,得到方程组:
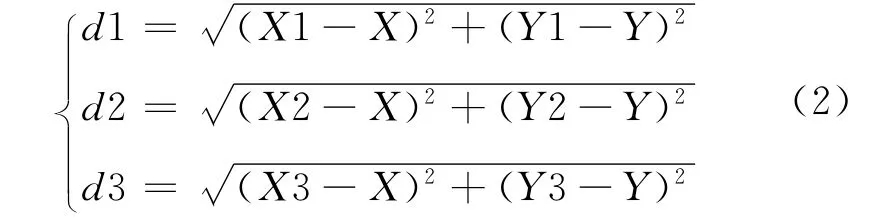
这是一个非线性方程,可以采用线性化方法求出未知量 (X,Y)。
2.2 定位算法设计
建立咽喉区Mesh网后,为避免同一网络节点信息发送和接收的冲突,网络协调器采用轮询方式呼叫参考节点,对参考节点播发广播信息进行严格的时序控制,收集待定位节点一跳范围内所有参考节点的RSSI值。
1.协调器从节点短地址列表中依次取出与参考节点对应的短地址,向该参考节点发送RSSI Blast广播请求命令。
2.拥有该短地址的参考节点广播RSSI值,一跳范围内的所有网络节点 (包括其他参考节点)收到RSSI Blast信号,分别记录该参考节点的RSSI值。
3.所有的参考节点轮询一遍后,网络中车载主机、平调手持台、智能铁鞋节点将完整记录了一跳范围内所有参考节点的RSSI值 (每一个参考节点也都记录了其他参考节点的RSSI值)。
4.协调器分别向平调手持台节点、智能铁鞋节点发送RSSI请求命令,收集它们记录的RSSI值。
5.平调手持台节点、智能铁鞋节点收到RSSI请求命令后,也同时向非协调器的车载主机节点发送它们记录的RSSI值。
车载主机通过比较自己记录的各参考节点RSSI值,选中2个最大RSSI值的参考节点,作为“待定位节点”,分别找到此 “待定位节点”的最大RSSI值的参考节点,将已知的RSSI值和距离d,代入 (1)式,计算出n和A的值;以车载主机为待定位节点,再从车载主机记录的各参考节点RSSI值中找到3个最大RSSI值的参考节点,根据计算出的n和A,再次代入 (1)式,求出d1、d2和d3,并代入方程组 (2),得到车载主机的位置坐标。
同理,计算平调手持台和智能铁鞋的位置坐标时,也先选择它们所记录的2个最大RSSI值的参考节点,作为 “待定位节点”,求出n和A;再从它们记录的各参考节点RSSI值中选3个最大RSSI值的参考节点进行计算。
2.3 定位算法修正
链路质量指示 LQI (Link Quality Indicator)与RSSI相类似,也随距离的增加而减小,ZigBee模块可以从接收的信息中一并获取。LQI的动态范围为0~255,比RSSI值大,有更高的分辨率。将LQI值融入RSSI的测距算法中,可进一步提高测距精度。调车车列运行在轨道区段上,停留车也位于股道或无岔区段上,计算出的位置坐标必须根据“三点一线”的原理进行修正,确保位置坐标修正到调车车列或停留车所在的区段上。
3 可行性分析及展望
调车作业站场的ZigBee定位网络,涉及到的设备都需要增加ZigBee模块。车载主机本身就是以嵌入式单板计算机为核心的多板卡集成设备,方便增加ZigBee模块;集成有ZigBee模块的智能铁鞋也有实际的应用;平调手持台体积小,便于携带,也需要对主控板重新设计,集成ZigBee模块;参考节点就是单一的ZigBee模块,但需解决现场安装和供电问题。ZigBee模块体积小、功耗低,可考虑将其布置到咽喉区道岔转辙机或电缆盒中,并根据定位的需要灵活配置。
通过构建覆盖整个站场的ZigBee定位网络,能实时计算作业车列和停留车的位置,拓展了STP系统的调车作业监控范围。
1.可取消地面点式应答定位模块,系统一上电运行,即进入调车作业监控状态,不再区分监控模式和非监控模式。
2.通过智能铁鞋实时获取作业端的停留车位置及平调手持台提供的车列前部位置,实现连挂作业的自动防护,取消十五三车连挂作业方式。
3.采用ZigBee模块实现非集中道岔状态采集功能,将采集机作为非集中区Mesh定位网络中的参考节点,传输道岔状态信息,实现非集中区调车作业监控。
4.智能铁鞋所具备的定位、监测和无线通信功能,便于将智能铁鞋的监测和管理统一纳入到STP系统的维护管理中。
4 结束语
在STP-KA系统研发初期,设计了成对的基于ZigBee模块的无线平调接口盒,分别连接到车载主机和便携式平调机控器的外围接口上,使得车载主机能以无线的方式,实时接收便携式平调机控器的调车指令,实现了本务机车在中间站调车作业时的十五三车连挂作业的机控功能,为ZigBee模块在STP系统中的成功应用积累了一定的经验。基于RSSI测距模型的定位算法与环境变量n和A直接相关,作业站场的障碍物 (如停留车多少)、天气条件等都会影响无线信号的传输;研究的定位算法基于实测的RSSI值,适宜选择典型的非集中区站场进行试验,方便在试验过程中不断修正、完善定位算法,先期实现非集中区调车作业的监控,为最终实现统一的集中区和非集中区调车作业安全监控,做好充分的技术准备。
[1] 中国铁路总公司 .铁总运[2014]182号 .TJ/DW035-2014无线调车机车信号和监控系统暂行技术规范[S].2014.
[2] 中华人民共和国 .GB/T 7178.1-9-1996铁路调车作业标准[S].1996.
[3] 许勇.基于ZigBee的 Mesh网络的研究[D].中国科技大学硕士学位论文,2011.
[4] 刘波,陈兆俊.非集中道岔状态监测装置研究[J].中国铁路,2012(10).
[5] 张安安,熊少阳.基于ZigBee技术的智能防滑铁鞋系统的设计[J].江西科学,2013(31).
[6] 马云,郑云水.基于ZigBee网络的智能铁鞋系统设计[J].电子技术应用,2012(12).
