一种导弹导引律及参数的非线性MMAE辨识方法
2015-12-28王小平蔡远利于振华林秦颖叶希贵狄方旭
王小平,蔡远利,于振华,林秦颖,叶希贵,狄方旭
(1.西安交通大学 电子与信息工程学院,陕西 西安710049;
2.中航工业613研究所 光电控制技术重点实验室,河南 洛阳471009;3.空军工程大学 航空航天工程学院,陕西 西安710038)
0 引言
目前大多数关于飞机对抗导弹的最优轨迹优化问题的研究,所采用的方法和得到的结论均需要了解攻击导弹的所有信息。然而,在实战中往往对来袭导弹缺乏足够的了解,难以完全掌握来袭导弹导引律、导引参数以及导弹本身等信息,因此对导弹的导引律、导引参数等进行辨识的研究具有重要的科学意义和工程价值。
对于上述问题,国内外公开的研究文献相对较少。文献[1]采用一种极大似然估计器实现了对某地空导弹PPN导引律参数的估计。文献[2]通过一组导引律模型,采用Byesian理论计算似然函数的方法实现对导引律的辨识并进行轨迹优化。虽然上述方法在导弹的弹道特征比较明显时可以有效估计出导引律参数,但对于前置角特性基本一致的同类导引律却难以奏效。文献[3]采用多模型自适应估计(MMAE)方法,在二维平面内,通过线性化导引律方程实现了导引律的辨识。
本文通过导弹三自由度质点模型与导引律相结合直接建模,建立导弹导引非线性模型集,研究采用基于UKF的MMAE算法,直接在三维坐标内实现对导弹导引律和导引参数的快速准确辨识。
1 数学模型
1.1 导弹模型建立
导弹可用三自由度质点模型表示为:

式中:状态变量[xm,ym,hm,Vm,γm,χm]分别为导弹的三维坐标、速度、航迹倾角、航迹偏航角;Tm为导弹发动机推力;Dm为导弹受到的空气阻力;ap,ay为纵向和侧向加速度。考虑到导弹在目标搜索、制导以及导弹的实际响应惯性,通常将导弹俯仰和偏航加速度指令响应等效为一阶模型,惯性时间常数设为τ,表达式如下:

式中:apc和ayc分别为导弹的俯仰加速度指令和偏航加速度指令。对于不同的导引律,其生成方式也不同。一般情况下,在导弹的末制导状态下,可以假设导弹的飞行速度保持常值,即将式(1)中的方程替换为:

由此,可以得到导弹状态向量为:

1.2 导弹导引律模型建立
考虑目前导弹采用的主流导引律情况,分别建立IPN,APN,OGL和PP导引律模型。
(1)IPN导引律:

式中:NIPN为导引常数;ω为视线角速率;Vc为接近速度。
(2)APN导引律:
式中:NAPN为导引常数;at为目标加速度。
(3)OGL导引律:

式中:NOGL为导引常数,由参数α决定;am为导弹的加速度;标准剩余机动时间
(4)PP导引律:

式中:NPP为导引常数为(Vm×r)×Vm方向的单位矢量。
2 非线性MMAE导弹导引律辨识算法
MMAE 方法最早由 Magill[4]提出,并由 Sims等[5]进一步完善而来,也是目前应用较为广泛的一种估计方法。其优点在于可以实现精确的模型匹配和参数辨识,状态估计精度高。为适应对抗条件下导弹大机动时的状态估计及导引律和参数辨识,本文使用非线性导弹模型并利用UKF算法[6-8]构建了UKF-MMAE导引律辨识算法,其结构如图1所示。
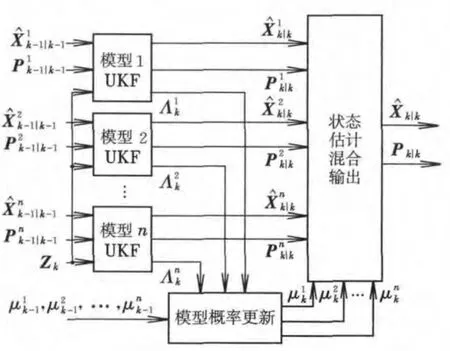
图1 UKF-MMAE算法结构图Fig.1 Algorithm structure of UKF-MMAE
算法核心思想是:根据导弹和导引律的非线性描述构建模型集,通过对模型集中的各个模型进行并行无色卡尔曼滤波(UKF)估计,并根据估计输出与观测数据的匹配情况确定各模型的权重(似然函数),总估计输出为各模型的输出与权重乘积的组合,同时根据各模型的似然函数实现导弹导引律和参数辨识。该算法中主要包括有:MMAE模型集、并行UKF滤波、模型概率更新和状态估计混合输出。
2.1 MMAE模型集
对于MMAE算法,其模型集必须与实际模型集相一致,在此假设攻击导弹导引律为上述4种导引律之一,并根据每种导引律的参数范围,选择特定的参数值,与导弹的三自由度非线性模型组合,构成MMAE算法的所需模型集。
2.2 UKF滤波算法
在UKF-MMAE中,各模型的滤波算法相同,均为UKF滤波算法,因此,在此仅给出第j个模型Mj的UKF滤波算法表达式。
(1)量测方程
各模型的量测方程均表示为:

通过机载雷达对来袭导弹实现测量是在球面坐标系下的,通常可以测得飞机与导弹之间的距离r,目标的高低角e和方位角b。考虑到机载雷达的测量值均为导弹与飞机之间的相对关系,并且假设本机的位置和运动信息已知,可得:

因此量测向量可表示为:

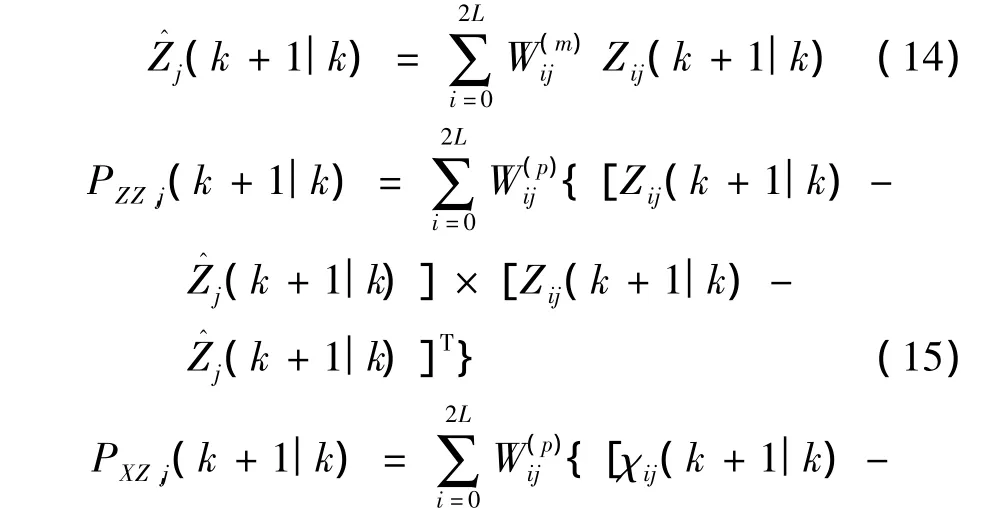
(2)UKF预测方程
首先在UT变换中,应用比例修正框架的比例对称采样[9]实现 Sigma点采样,得到Sigma采样点χj和权值联合向量最后推得测量、测量协方差、状态与测量协方差的预测方程,以及状态向量和方差更新的方程如下:

2.3 模型概率更新
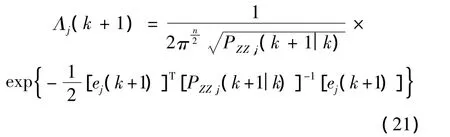
根据上述的UKF滤波算法,可以得到模型集中各模型的预测输出,并与实际量测信息比较得到预测误差为:

采用Gaussian density函数确定与第j个模型匹配的似然函数表达式如下:
根据各模型的似然函数Λj(k+1)进行模型匹配概率的更新,得到各模型的预测概率:

其中,归一化系数C为:

2.4 状态估计混合输出
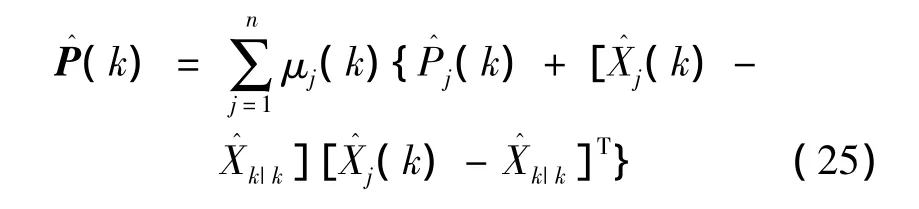
在多模型估计器中,存在多个模型的估计输出,在假设各模型匹配概率计算正确的前提下,则估计器的总输出为:

总的协方差阵:
3 导弹导引律辨识仿真
导弹的导引律辨识包括:确定导弹的导引律类型和确定导引律参数。在导引律参数中,需要辨识的增益包括 NIPN,NAPN,NOGL和 NPP。增益 NIPN,NAPN和NPP为常数;NOGL为时变参数,主要辨识其中的α。在此根据各参数的实际工作设定取值范围,NIPN,NAPN分别取(3,4,4.5,5);NPP取(2,5,8,10);NOGL中的α 取(0,0.03,0.06,0.1)。导弹和飞机的初始状态如表1所示。

表1 飞机和导弹的初始状态Table 1 Initial states of airplane and missile
离散节点间隔Δt=0.25 s,仿真步长ts=0.025 s,飞机采用固定机动飞行(迎角和滚转角按正弦函数周期性变化),导弹采用不同导引律进行攻击状态下得到的仿真数据,根据飞机和导弹的相对关系,计算出观测数据,并人为加入测量噪声,生成观测数据:IPN导引律,导引参数NIPN=4时的辨识结果如图2所示;APN导引律,导引参数为NAPN=4时的辨识结果如图3所示;OGL导引率,α=0.1时对应导引参数NOGL的辨识结果如图4所示;PP导引律,导引参数NPP=5时的辨识结果如图5所示。

图2 IPN辨识结果Fig.2 IPN identification results


图3 APN辨识结果Fig.3 APN identification results

图4 OGL辨识结果Fig.4 OGL identification results

图5 PP辨识结果Fig.5 PP identification results
由图可知,采用MMAE算法,可以有效实现导引律类型的辨识。由于PP导引律与IPN,APN及OGL导引律差异较大,无论是排除还是认定,能够在很短的时间内迅速被检出。对于IPN,APN和OGL导引律,由于相互之间差异相对较小,检出时间稍长,但均能在2.5 s内被有效识别。
在参数识别方面,APN参数识别的效果最好,能在4 s之内实现准确识别其导引参数;IPN参数识别时间在5 s之内;而对于PP导引律,其参数识别时间在4 s左右,且其匹配概率上升较为缓慢,主要原因在于当导弹和飞机距离较远,且其LOS线与导弹速度矢量之间的夹角较小时,PP导引律产生的控制指令较小,导引系数对其影响较小,故导引参数确认过程较为缓慢。对于OGL导引律,由式(9)可知,当导弹与飞机距离较远时,tgo时间比较大,且参数α一般很小,此时α对最终导引系数NOGL影响微弱,当导弹接近目标时,tgo时间减小,参数α对导引律的影响才逐渐显现。因此,对于OGL参数α的识别只能在导弹遭遇目标前很短的时间内才能被有效检测。
需要说明的是,对于导弹的导引律和参数辨识而言,特别是参数的辨识,只有在导弹的实际状态与预期状态存在差异,需要对导弹实施控制时,导引律和参数的差异性才能被充分显现出来,即才能被有效识别或检出。因此,要实现导引律和参数的辨识,飞机做一定的机动飞行是必要的前提条件。
4 结束语
本文针对导弹弹道特性接近情况下的导引律辨识问题,采用非线性模型、UKF滤波和MMAE相结合的思路,设计的导弹导引律和导引参数自适应算法,能够直接在三维坐标内对主流的IPN,APN,OGL和PP导引律及其参数实现快速辨识。同样,该方法可通过增加模型的方法来适应新的导引律,在导弹拦截、机动防御等方面具有实际应用价值。需要指出的是,该算法中存在两点需改进之处:一是导弹匀速假设问题;二是为提高参数辨识精度需要增加估计器个数,进而会影响计算速度问题,需要在后续工作中进一步加强研究。
[1] Lin L,Kirubarajan T,Barshalom Y.Pursuer identification and time-to-go estimation using passive measurements from an evader[J].IEEE Transactions on Aerospace and Electronic Systems,2005,41(1):190-204.
[2] Karelahti J,Virtanen K.Adaptive controller for the avoidance of an unknownly guided air combat missile[C]//The 46th IEEE Conference on Decision and Conrol.USA,2007:1306-1313.
[3] Shaferman V,Shima T.Cooperative multiple-model adaptive guidancefor an aircraft defending missile[J].Journal of Guidance,Control,and Dynamics,2010,33(6):1801-1812.
[4] Magill T D.Optimal adaptive estimation of sampled stochastic processes[J].IEEE Transactions on Automatic Control,1965,10(4):434-439.
[5] Sims F L,Lainiotis D G.Recursive algorithm for the calculation of the adaptive Kalman filter weighting coeffcients[J].IEEE Transactions on Automatic Control,1969,14(2):215-218.
[6] Julier SJ,Uhlmann J K.A new extension of the Kalman filter to nonlinear system[C]//The 11th Int.Symp.on Aerospace/Defense Sensing,Simulation and Control.Orlando,Forida Academic Press,1997:562-569.
[7] Wan E A,Merwe R,Nelson A T.Dual estimation and the unscented transformation[C]//Processing of the 2000 Conference:Advances in Neural Information Processing Systems 12.Washington,MIT Press,2000:600-672.
[8] 潘泉,杨峰,叶亮,等.一类非线性滤波器-UKF综述[J].控制与决策,2005,20(5):481-494.
[9] Wan E A,Van D R.The unscented Kalman filter,in Kalman filtering and neural network[M].USA:John Wiley&Sons,Inc.,2002.
