IMU/DGPS辅助航测技术在1∶2000航测成图中的应用及成图精度分析
2015-12-28梁龙帅杨国创
梁龙帅 杨国创
(广东省地质测绘院 广东 广州 510800)
IMU/DGPS辅助航测技术在1∶2000航测成图中的应用及成图精度分析
梁龙帅 杨国创
(广东省地质测绘院 广东 广州 510800)
以广东省佛山市高明区测区1:2000航测成图技术方案为例,简要介绍IMU/DGPS辅助航空摄影测量技术在大比例尺测图中的应用,并对IMU/DGPS辅助空三加密成果进行精度分析。通过外业检测数据对DLG进行数学精度评定,论证采用IMU/DGPS辅助航空摄影测量技术在大比例尺测图中的数学精度。
IMU/DGPS;航空摄影测量;空中三角测量;精度分析;生产作业率
1 前言
目前,运用IMU/DGPS系统和航摄仪集成的方法,通过GPS载波相位差分定位获取航摄仪的位置参数和惯性测量单元IMU测定航摄仪的姿态参数,由IMU/DGPS集成系统可以获取摄影瞬间航摄仪的位置参数、姿态参数,也就是摄影像片的外方位元素,将此6种参数与少量地面控制点进行联合平差计算,即IMU/DGPS辅助空三加密解算,可得到各航片精确的外方位元素。
通过中小比例尺测图实践可以证明:上述方法可大大减少航空摄影测量作业量,甚至完全免除地面像控点,达到无需空中三角测量即可测图,进而减轻劳动强度,缩短作业周期,提高生产效率。
本文以广东省佛山市高明区测区1:2000航测成图中的技术方案为例,简要介绍IMU/DGPS辅助航空摄影测量技术在大比例尺测图中的应用,以及GPS地面基站的布设方案、外业像控点布设方案及内业加密方案,并对IMU/DGPS辅助空三加密成果进行精度分析,通过外业检测数据对线划图进行数学精度评定,论证采用少量像控点的IMU/DGPS辅助航空摄影测量技术在大比例尺测图中的数学精度。
2 IMU/DGPS辅助航空摄影测量技术实施方案
2.1 IMU/DGPS辅助航空摄影
为提高定位精度,在精密定位应用中通常采用差分GPS(DGPS)技术:将一台(或几台)GPS接收机安置在基准站上,与机载接收机进行同步观测。根据基准站已知精密坐标,计算出基准站到卫星的距离改正数,并对机载接收机的定位结果进行改正,从而提高定位精度。采用UCXP数码航摄仪与IMU/DGPS航空摄影技术恢复摄影瞬间的位置和姿态,得到航摄像片及其外方位元素。依据相关规范[4]要求:1:2000成图地面基准站间距离不超过30km。佛山市高明区,东西跨度约 55km,南北长度约42km。在明城镇、荷城街道、西岸镇沿省道S5、S113、S272在县界附近布设6个地面基准站,均连接四等水准高程。
本项目航迹线按照东北—西南方向斜向敷设,航摄像片短边平行于飞行航线。摄区绝对航高为1800米,平均面高程133米,最大旋偏角为28°。航向重叠为60%—75%,旁向重叠为25%—40%,航线间接合良好,重叠符合规范要求,无绝对漏洞和相对漏洞。全区航摄33条航线(其中9条为补飞航线),共计2992张自然彩色数码像片。UCXP数码航摄仪焦距100.5mm,UCXp数码影像实际物理像幅大小为20cm×13cm,大部分影像清晰,反差适中,目视效果良好。
2区域网设计及像片控制测量像片控制点航向基线数跨度估算公式:

式中:
ms--连接点 (空三加密点)的平面位置中误差(单位:mm)
mh--连接点(空三加密点)的高程中误差(单位:m)
mq--视差量测的单位权中误差(单位:mm)
K--像片放大成图的倍数
H--相对航高(单位:m)
b--像片基线长度(单位:mm)
n--航线方向相邻平面控制点之间的间隔基线数
对于常规航空摄影,根据以上公式,可以估算出不同地形类别的平高点、高程点间隔基线数如下表:
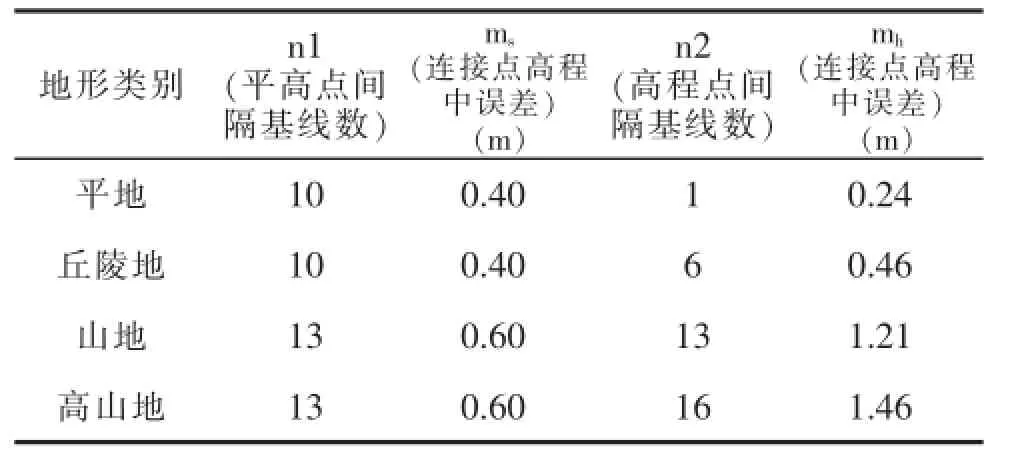
表1 作业区域地形类别、相关间隔基线及精度
采用IMU/DGPS辅助航空摄影测量技术时,依据低空数字摄影测量规范要求,平面控制点采用角点布设法,区域网的航线数和和基线数可适当放宽,可根据需要加布高程控制点,区域网中应至少布设一个平面检查点。山地区域网布设航线跨度不超过7条航线,平高点基线跨度不超过20条基线(放大约0.5倍),高程点基线跨度不超过20条基线(放大约0.5倍),共布设区域网17个,第6网采用9点法布点,其余各网采用5点法布点,布设平高控制点144个,山地布设高程控制点120个。平地区域网平高点间隔不超过基线跨度不超过35条基线,高程点间隔不超过1条基线。6网、7网为实验区,实验区控制点数27个。已有1:500地形图(DWG格式)数据覆盖面积达368km2,用于补充控制点分布不足地区的控制点选取(图1)。

图1 作业区域已有图件数据分布图
3 IMU/DGPS辅助空中三 角测量、外业调绘及DOM、DEM、DLG制作
地面控制网的平面坐标依据相关规范,通过静态GPS方法获取,GPS观测、计算须满足相关规范要求。基站、角点、检测点的高程通过联测已知水准点获取,也可采用国家有关部门公布的高精度似大地水准面模型计算获取。采用高精度的支持载波相位差分GPS定位技术的高精度动态处理软件,基于精确的基站坐标(WGS84坐标),差分解算机载GPS观测数据,内插GPS摄站坐标,GPS摄站坐标投影转换为佛山市独立坐标系,摄站高程采用高精度似大地水准面模型内插获取。利用机载GPS处理数据,将基于IMU/DGPS技术直接获取的每张像片的外方位元素,作为带权观测值参与摄影测量区域网平差,获得更高精度的像片外方位元素成果。经过内业加密,在JX4全数字摄影测量系统上进行光束法区域网自动空中三角测量,根据航线影像自动进行影像匹配,建立数字地面模型,内业进行地物、地貌立体测绘,利用JX4成图软件进行编辑,生成1:2000数字线划调绘底图。通过采集的特征点、线构建TIN三角网,由TIN生成建立DEM,并完成影像的全数字微分纠正,按照统一的要求,进行色差调整、影像镶嵌,最后对DOM进行分幅裁切,制作1:2000彩色数字正射影像图。叠加DOM、DLG数据,形成外业调绘巡查底图进行调绘、补测,内业修改后、再编辑形成最终的1:2000数字线划图。
4 数学精度分析
4.1 空三加密精度统计
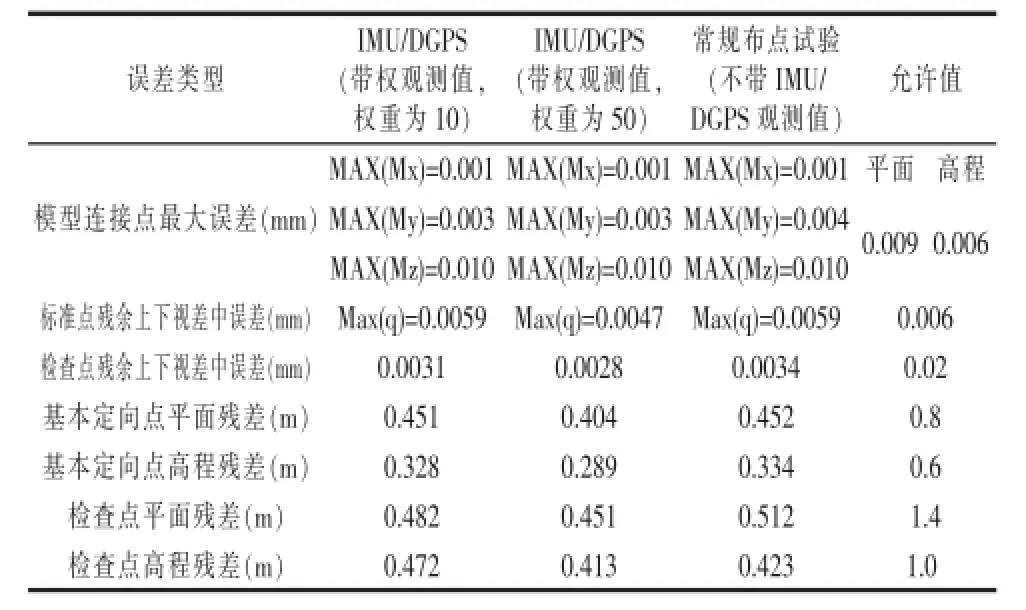
表2 空三加密精度统计表
以上误差均在各项检测误差允许值内,符合现有规范及设计要求(表2)。
4.2 1:2000数字线划图(DLG)数学精度检验
外业利用全站仪检测地物点平面坐标1136处,粗差4处,粗差率为0.35%,允许值为5%;检测点平面位置中误差为:±0.662m,允许值为±1.2m。平面位置精度满足1:2000数字线划图成图需要。
外业利用全站仪检测高程注记点1262处,粗差20处,粗差率为1.58%,允许值为5%,检测点高程中误差为:±0.521m,允许值为±0.75m。高程精度满足1: 2000数字线划图成图需要。
4.3 1∶2000数字高程模型(DEM)数学精度检验
内业检测1:2000数字高程模型 (DEM)1307个特征点高程,检测点高程中误差为±0.306m,允许值为±0.7m;粗差38个,粗差率为2.90%,允许值为5%;
外业检测1:2000数字高程模型(DEM)230个特征点高程,检测点高程中误差为±0.521m,允许值为±0.75m;粗差5个,粗差率为2.20%,允许值为5%。
高程精度满足1:2000数字高程模型 (DEM)成图要求。
4.4 1∶2000数字正射影像图(DOM)数学精度检验
内业检测1:2000数字正射影像图(DOM)7487个特征点的平面坐标,检测点平面位置中误差为± 0.434m,允许值为±1.4m;粗差22个,粗差率为0.29%,允许值为5%;
外业检测1:2000数字正射影像图(DOM)102个特征点的平面坐标,检测点平面位置中误差为± 0.429m,允许值为±1.4m;粗差2个,粗差率为1.96%,允许值为5%。
5 结论
5.1 DGPS平面计算精度与基站与飞机间距离有关系,距离越小,精度越高。
5.2 若能够充分利用已有大比例尺数字化测图成果,建立与当地地形更吻合的区域似大地水准面模型,以获取高精度的摄站高程,外业高程控制点的布设,将会有更大幅度的减少,甚至无需布设高程控制点。
5.3 加密区大小的选择:运用IMU/DGPS数字航空摄影测量技术,在1:2000成图中的山地、高山地地区,对于短边平行航线的像片而言,平高控制点基线跨度最大可放宽2倍,平面、高程精度均可达到规范要求;对于平地、丘陵地而言,平面控制点基线跨度最大可放宽1倍;高程点基线跨度可放宽0.5倍。
5.4 运用IMU/DGPS辅助航空摄影测量技术进行大比例尺测图,能满足测量的各项精度要求,同时减少作业成本的投入,大幅度提高了工作效率,取得良好的经济效益和社会效益。
[1]李学友,等.IMU/DGPS辅助航测技术在大比例尺航测成图中的应用[J].测绘科学,2006,(1):60—62.
[2]蔡文惠,梁国华.IMU/DGPS辅助航空摄影测量应用探讨[J].测绘通报,2009,(4):41—43.
[3]GB/T7930-20081:5001:10001:2000地形图航空摄影测量内业规范[S].
[4]GB/T7931-20081:5001:10001:2000地形图航空摄影测量外业规范[S].
[5]CH/Z_3004-2010低空数字航空摄影测量外业规范[S]