室内智能舒适照明控制策略研究
2015-12-27冯冬青刘丹丹
冯冬青, 刘丹丹
(郑州大学 电气工程学院 河南 郑州 450001)
室内智能舒适照明控制策略研究
冯冬青, 刘丹丹
(郑州大学 电气工程学院 河南 郑州 450001)
根据工作面照度、邻近区域照度、背景区域照度、工作面均匀度和邻近区域均匀度5个主要因素,建立了视觉评估指标模糊系统模型.针对实际照明需求情况,综合考虑室内照明的整体效果和个性化需求,提出了基于粒子群优化的室内灯具亮度控制策略.通过最大化室内照明系统的视觉效果和节能的综合目标函数,优化控制灯具亮度,达到室内照明舒适、方便并且节能的目的.将灯具布置分为整体和局部照明两种,根据照明需求和人员分布,对灯具亮度控制策略进行仿真研究,结果表明,该方法可以实现节能与舒适的综合最优.
智能照明; 舒适性; 控制策略; 粒子群算法
0 引言
随着全世界范围内能源短缺以及人民生活水平的日益提高,人们对节能、舒适的要求也越来越强烈,同时控制技术、通信技术、计算机技术发展的日新月异,使智能照明控制技术应运而生,日趋成熟,国内外有关智能照明方面的研究[1-5]很多.其中,文[1]提出通过改变灯开闭的一些时间常数从而达到节能的效果.文[2-3]提出不同区域固定灯组的控制方法,但都在不同程度上忽略了其他灯组的照度影响,模型不够精确.并且大多数研究者对于舒适方面的研究较为简单,因此,研究室内智能照明的舒适性及节能性更具有实际意义.
影响照明效果的因素有不同区域的照度值和不同区域的均匀度,由于各个指标的度量标准和取值范围不统一,影响程度也不一样,需要对指标进行模糊处理.作者利用层次分析法获得各个指标的权重,采用粒子群算法通过构建以最小能耗获取最大照明效果为目标的适应度函数,进行全局搜索各个灯具的最佳亮度.室内照明灯具分为整体与局部照明两种,当有人的工作位置多于总工作位置的1/3时采用整体照明,当少于或等于1/3时,采用整体和局部照明相结合的方法,这样既可以满足照明需求又能减少能源消耗,最后进行计算机仿真,并将仿真结果与实际测量数据进行了比较,验证了方法的有效性.
1 视觉评估指标模糊性研究
涉及到的视觉指标评价问题为不同区域照度水平和不同区域照度均匀度,需要先对这些指标进行模糊性研究[6],将指标实际值等效变换到0~1区间.
1.1 照度值的指标评价
室内照度值一般考虑工作面、邻近区域和背景区域的照度值.工作面照度取距地面0.75 m的桌面,邻近区域为工作区域的0.5 m范围内,背景区域为房间或场所内的通道和其他非作业区域.按照CIE标准《室内工作场所照明》[7]的要求,根据经验进行模糊化处理之后,工作面、邻近区域、背景区域照度值的隶属度曲线如图1~3所示.

图1 工作面照度值的隶属度曲线Fig.1 The working illuminant values membership curve
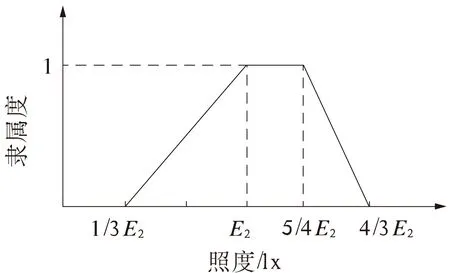
图2 邻近区域照度值的隶属度曲线Fig.2 The adjacent illuminant values membership curve
1.2 照度均匀度的指标评价
均匀度为最小照度与均匀照度之比值.根据照度均匀度要求,作业区域内的照度均匀度不应小于0.7,而工作面邻近区域的照度均匀度不应小于0.5.经模糊化处理之后,照度均匀度的隶属度曲线如图4所示.

图3 背景区域照度值的隶属度曲线Fig.3 The background illuminant values membership curve

图4 照度均匀度的隶属度曲线Fig.4 The uniformity of illuminant values membership curve
2 照度模型的建立
2.1 照度计算方法

图5 点光源与P点照度计算示意图Fig.5 The sketch of calculation between point light and illumination of P point
模型采用近似光源的灯具,忽略室内各个墙面反射对检测点产生的照度影响,并且每一点的水平照度是各个灯具在该处产生的水平照度的线性组合.灯具在P点产生的水平照度如图5和式(1)[8]所示,

(1)
式中:E表示灯具在P点产生的水平照度;I(θ)表示灯具在θ方向的光强;H表示灯具到P点的垂直距离;L表示灯具与P点的水平距离.
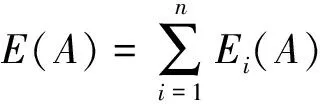
在室内是多灯具的情况下,某点的照度值为各个灯具在该点产生的照度值的和,即
(2)
式中:E(A)表示点A的总水平照度值;Ei(A)为灯具i在点A产生的水平照度值;n为灯具总数.
2.2 综合评价决策解集最优评估数学模型
由于问题的目标是在耗能最小的情况下使得视觉效果达到最优,要想达到较好的视觉效果需要更多的能量消耗,在设计目标函数f时加入视觉效果和能量消耗之间的权重系数,有
(3)

图6 功能评价层次结构图Fig.6 The structure sketch of function evaluation
式中:wi(i=1,2,3,4,5)为各指标的权重值;E1为工作面照度;E2为邻近区域照度;E3为背景区域照度;U01为工作面均匀度;U02为邻近区域均匀度;p(i)为第i灯的能量消耗;q为视觉效果和能量消耗之间的权重系数.
对于(3)式中影响视觉效果的各指标权重值的处理,是根据实际经验获得的.为了更加合理地确定各个指标的权重值,采用层次分析法(AHP)进行处理,在已有环境下考虑的层次结构如图6所示.通过计算可以得到:工作面照度水平权重为0.52,邻近区域照度水平权重为0.132 1,背景区域照度水平权重为0.047,工作面照度均匀度水平权重为0.251 4,邻近区域照度均匀度水平权重为0.049 4.
3 各个灯具亮度设定值寻优
3.1 改进粒子群算法
粒子群优化(PSO)算法是一种新兴的智能搜索算法,由于其具有较多优点及实际应用价值,所以许多学者在PSO算法改进和PSO算法的应用方面不断进行深入研究,并被工程技术人员应用到实际中[9-11].粒子群优化算法的基本原理:搜索空间中有一群粒子,粒子的位置就是被优化问题的空间可能解,所有粒子都有自己被优化目标函数决定的适应值,每个粒子都由一个速度决定移动的方向和位移,粒子追随当前最优解进行搜索.在粒子更新位置所依赖的两个最优解:一个是粒子自身的历史最优解,另一个是粒子种群的历史最优解.
对于D维问题,粒子i的第k代位置表示为Xi(k)=(xi1(k),xi2(k),…,xiD(k)),速度表示为Vi(k)=(vi1(k),vi2(k),…,viD(k))T.
粒子速度和位置更新方程为
vid(k+1)=wvid(k)+c1ξ(pid(k)-xid(k))+c2η(pgd(k)-xid(k)),
(4)
xid(k+1)=xid(k)+vid(k+1),
(5)

(6)
式中:pid(k),pgd(k)分别为粒子i在第k代的局部最优位置和全局最优位置;ξ,η为[0,1]内均匀分布的随机数;w为惯性因子;wmax为惯性因子的最大值;wmin为惯性因子的最小值;kmax为总的迭代次数;k为当前迭代次数;c1,c2为常数.

v1id(k+1)=wvid(k)+c1ξ(pid(k)-xid(k))+c2η(pgd(k)-xid(k)),
(7)
v2id(k+1)=wvid(k)+c3ξ(pid(k)-xid(k))+c4η(gid(k)-xid(k)),
(8)
vid(k+1)=uv1id(k+1)+(1-u)v2id(k+1),
(9)
(10)
式中:v1id(k+1)为标准粒子群算法的速度更新公式;v2id(k+1)为局部粒子群算法的速度更新公式;vid(k+1)为改进粒子群算法的速度更新公式;ζ为随机数;w的值见公式(6).
3.2 改进粒子群算法在灯具亮度的寻优过程
在粒子群算法中xi(k)表示灯具亮度的当前组合,pid(k)表示某一灯具亮度组合最优值,pgd(k)表示所有灯具亮度组合最优值,gid(k)表示邻域内所有灯具亮度组合最优值.则改进粒子群算法在灯具亮度的寻优步骤如下:
(a) 设定粒子群参数,如群体规模M,迭代次数k以及其他参数c1,c2,c3,c4,wmax,wmin.
(b) 对灯具的速度与位置进行初始化.
(c) 得到粒子个体最优、全局历史最优、领域内历史最优.适应度函数根据公式(3).
(d) 粒子速度更新根据公式(7)~(9),位置更新根据公式(10),这样得到粒子新的位置与速度.
(e) 判断是否满足结束条件,否则转至步骤c.
4 照度实验和数据分析
4.1 灯具照度实验
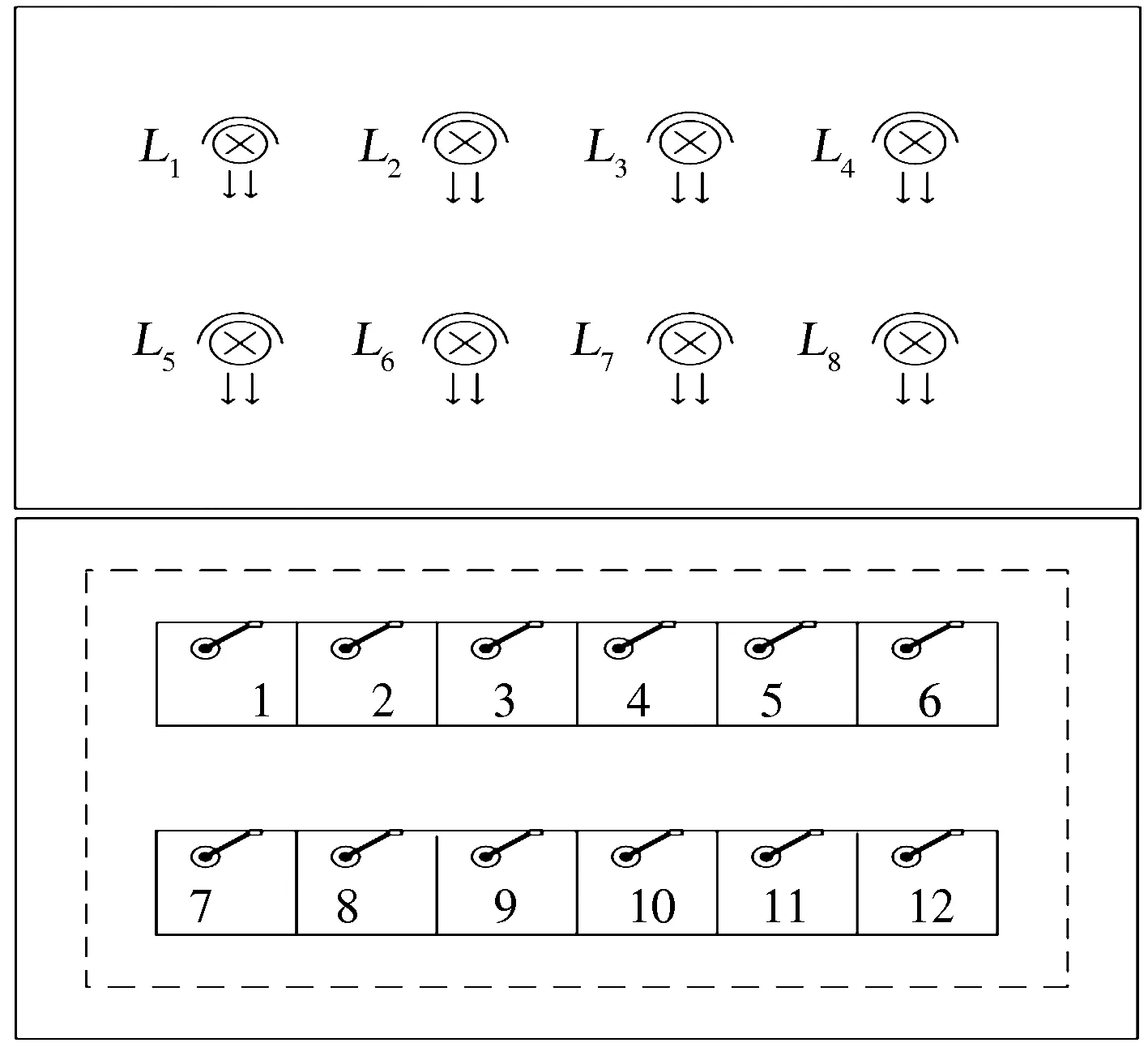
图7 室内灯具和工作区域的分布示意图Fig.7 The distribution sketch of lamps and work area
选取8m×5m×3m的室内空间为例,位置为郑州(东经113.42°,北纬34.44°),室内共有8盏整体照明灯具,型号为LVT-PL6060-40W-T,每盏灯可以进行2 800级调光,灯具的最大亮度为2 800lm,功率为40W,12盏局部可调光照明灯具放在工作面上并且能够满足照明补光灯的需要,功率为40W,每个工作面都有照度传感器和人员定位设备[12],室内灯具和工作区域的分布如图7所示.
图中共有12个工作位置且为工作区域,工作区域至虚线区域为邻近区域,剩余为背景区域.使用粒子群算法仿真,要求该房间工作面照度值500lx左右,初始化粒子数M=100,粒子的迭代次数kmax=50,加速因子c1=2.05,c2=2.05,惯性因子 w=0.7.照明控制系统的操作流程如图8所示.
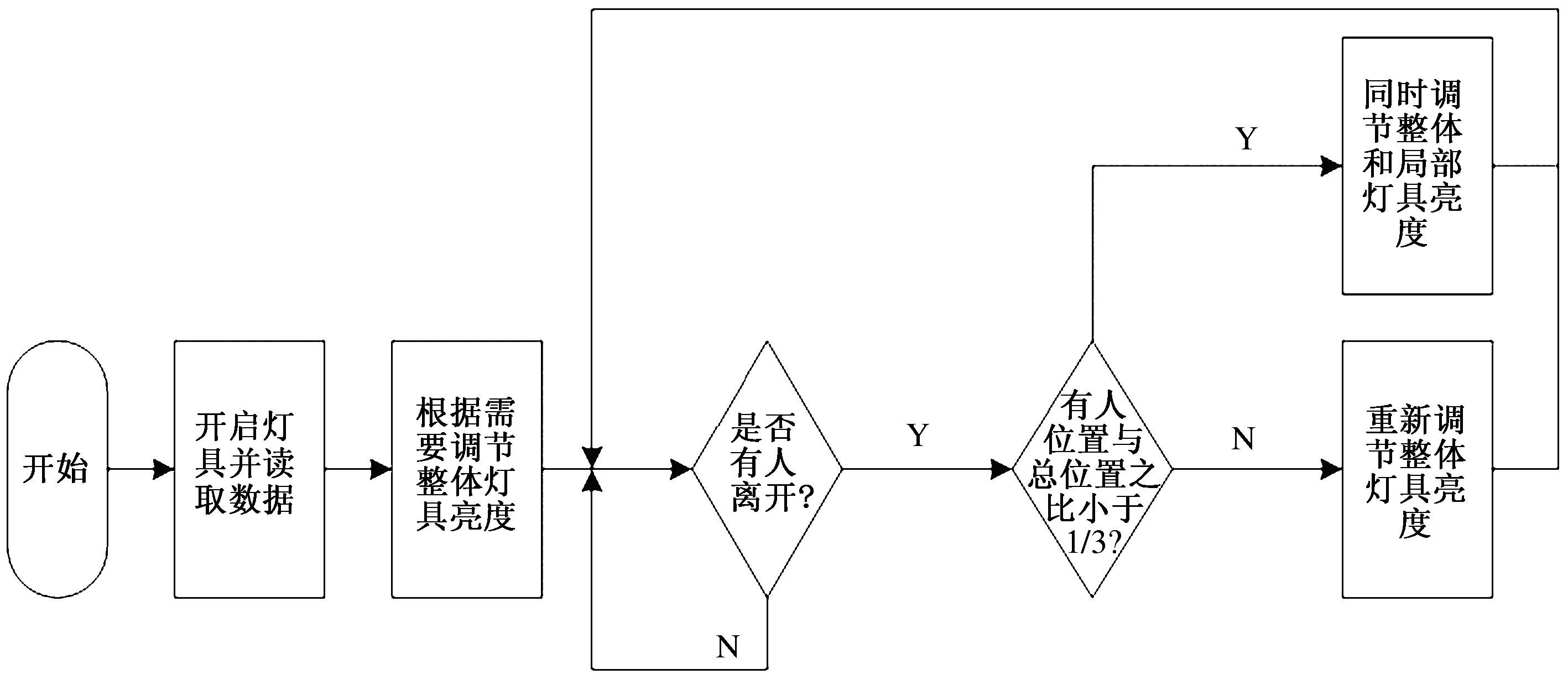
图8 照明控制系统的操作流程图Fig.8 The structure sketch of lighting control system
在测试中选取无人离开场景为场景一、工作位置1,2,3无人时为场景二和只有工作位置1,2,3有人时为场景三进行仿真与测试,选取时间16:00,17:00,18:00进行三个场景仿真与实验.结果显示,改进粒子群算法搜索大概经过8次寻优过程基本接近最优解,不同场景的目标值和群体均值的变化如图9所示.

表1 调整前的检测值Tab.1 The experiment values before adujsting
4.2 数据分析
调整灯具亮度前,通过多组照度传感器采集调节前的照度值以及均匀度,结果如表1所示.
根据检测到的照度值,由改进粒子群寻优算法得到场景一的灯具调节结果是:1~8号灯具的亮度分别为999,416,372,1 027,1 051, 298,368,1 022 lm.场景二的灯具调节结果是:灯具的亮度分别为367,1 021,159,1 128,1 252, 429,217,1 042 lm.场景三的灯具调节结果是:灯具的亮度分别为322,516,0,557,864,91,0,497 lm.根据以上各个灯具调节的亮度值进行灯具调节,理论分析和实际结果对比如表2所示.
由表2可知,理论值和实际测量值之间有一定误差.由分析可知误差来源主要有:①测量仪器的误差;②由于室内墙面、天花板以及地面的反射会产生反射光,尤其是背景区域离墙面比较近,所以实测值会更高一些.但调光后室内照度都能够满足照度要求,并且误差在允许范围内,所以该实验证明室内亮度调节策略是可行的.

图9 不同场景的目标值和群体均值的变化Fig.9 The change of the goal result and population mean in different situations 表2 理论值和实际值的对比结果Tab.2 The comparision of actual and theory values
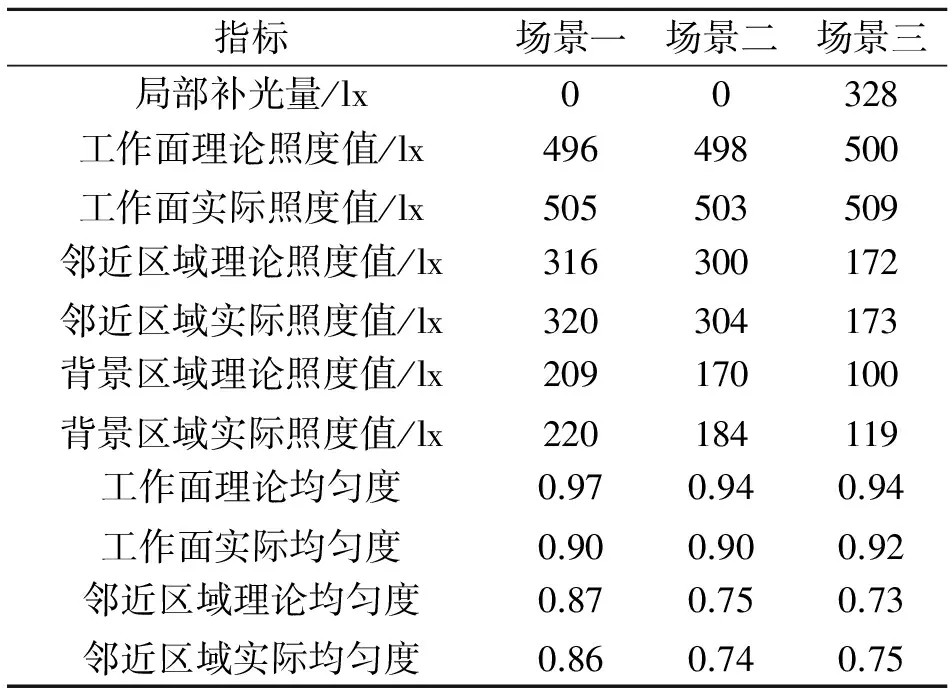
指标场景一场景二场景三局部补光量/lx00328工作面理论照度值/lx工作面实际照度值/lx496505498503500509邻近区域理论照度值/lx邻近区域实际照度值/lx316320300304172173背景区域理论照度值/lx背景区域实际照度值/lx209220170184100119工作面理论均匀度工作面实际均匀度0.970.900.940.900.940.92邻近区域理论均匀度邻近区域实际均匀度0.870.860.750.740.730.75
4.3 节能分析
取正常工作的某天为例,计算该亮度调节控制策略的节能效果.若是没有亮度调节功能,室内照明每小时的耗电量为
Ed=n×P,
(11)
其中,n为灯具的总个数,P为每盏灯的功率.
场景一与场景二每小时的耗电量为

(12)
其中,Wi为每盏灯的光通量.
场景三每小时的耗电量为

(13)
其中,Pd为台灯的功率.
正常工作情况下一天的照明时间大约为8h,其中工作区域无人缺席的照明时间大约为5h,工作区域缺席人数少于1/3的照明时间大约为2h,工作区域缺席人数大于2/3的照明时间大约为1h,则每天能耗大约减少1.722kW·h,节能约为55%,产生了良好的节能效果.节能分析结果表明,所提出的亮度控制策略可以实现舒适与节能的综合最优.
5 结语
首先考虑室内照明的功能性,得到照明环境评价的5个指标,但由于这些指标的度量标准等不统一,所以要对这些指标进行模糊处理,得到了隶属度曲线.利用层次分析法求出各个指标的权重,得到最小耗能情况下的最大视觉效果的目标函数,最后运用改进粒子群算法搜寻不同情境下的灯具最优组合.实验表明,该亮度调节控制策略能够根据照明需求和人员分布有效地调节灯具亮度,实现舒适度与节能的综合最优.
[1]ByunJ,HongI,LeeB,etal.IntelligenthouseholdLEDlightingsystemconsideringenergyefficiencyandusersatisfaction[J].IEEETransactionsonConsumerElectronics,2013,59(1):70-76.
[2]BhardwajS,OzcelebiT,VerhoevenR,etal.Smartindoorsolidstatelightingbasedonanovelilluminationmodelandimplementation[J].IEEETransactionsonConsumerElectronics,2011,57(4):1612-1621.
[3]PanMS,YehLW,ChenYA,etal.AWSN-basedintelligentlightcontrolsystemconsideringuseractivitiesandprofiles[J].IEEESensorsJournal,2008,8(10):1710-1721.
[4] 郭胜辉,朱学莉,朱树先. 基于模糊控制的教室照明系统 [J].照明工程学报,2013,24(3):127-130.
[5] 冯冬青,潘磊.基于改进粒子群算法的智能照明控制策略研究[J].郑州大学学报:工学版,2013,34(3):14-17.
[6] 孙雅明,杜红卫.可靠性知识与最优评估配电网故障恢复[J].电力系统自动化,2003,27(13):36-39.
[7] 中华人民共和国住房和城乡建设部.建筑照明设计标准GB50034—2013[S].北京:中国建筑工业出版社,2013.
[8] 李农,杨艳.照明手册[M].北京:科学出版社,2003:84-85.
[9] 郭建涛,刘洋,唐天宇.用于跳频分量搜索的环形拓扑粒子群算法[J].信阳师范学院学报:自然科学版,2014,27(2):267-270.
[10]张慧霞,张焱,高兴宝.求解作业车间调度问题的粒子群优化算法[J].河南科技大学学报:自然科学版,2008,29(6):49-52.
[11]商雨青,许伟,顾幸生. 交叉前置式粒子群优化算法及其在催化裂化C3含量软测量中的应用[J].电子学报,2012,40(9):1885-1888.
[12]Bahl P, Padmanabhan V N. RADAR: an in-building RF-based user location and tracking system[C]//Proceedings of the IEEE Infocom.Tel Aviv,2000:775-784.
(责任编辑:孔 薇)
Strategy Research on Indoor Intelligent Comfortable Lighting Control
FENG Dong-qing, LIU Dan-dan
(SchoolofElectricalEngineering,ZhengzhouUniversity,Zhengzhou450001,China)
In the lighting system, there were five main factors, such as the levels of illumination in the region of working, adjacent and background and the uniformity of illumination in the region of working and adjacent, that could affect indoor comfort and visual effects. The visual evaluation index fuzzy system model was established based on the above five factors. In view of the actual demand illumination, in order to adjust luminance automatically and to achieve the purpose of improving comfort, convenience and energy saving, a control strategy of indoor lamps’ luminance based on particle swarm optimization (PSO) algorithm was proposed. By maximizing the comprehensive objective function about the visual effect of indoor lighting system and energy conservation, the dimming levels were controlled optimally and the purpose of indoor lighting comfortable and convenient was reached. An illumination requirement was the combination of local and overall effects. According to users’ demands and locations, the control methods of lamps’ luminance were simulated and the results showed that this method could achieve the comprehensive goal of comfort and energy saving optimal.
intelligent lighting; comfort; control strategy; particle swarm optimization
2015-03-21
国家自然科学基金资助项目,编号61473266.
冯冬青(1958-),男,广东佛山人,教授,博士,主要从事智能控制理论与应用研究,E-mail:dqfeng@zzu.edu.cn.
冯冬青,刘丹丹.室内智能舒适照明控制策略研究[J].郑州大学学报:理学版,2015,47(3):99-104.
TP273
A
1671-6841(2015)03-0099-06
10.3969/j.issn.1671-6841.2015.03.019
