基于混合子空间去噪的免携带设备目标定位*
2015-12-26方小俊
刘 凯 方小俊 张 斌
(1.特种光纤与光接入网重点实验室,上海大学,上海,200072; 2.湖北省高速公路联网收费中心,武汉,430000)
基于混合子空间去噪的免携带设备目标定位*
刘 凯1方小俊1张 斌2
(1.特种光纤与光接入网重点实验室,上海大学,上海,200072; 2.湖北省高速公路联网收费中心,武汉,430000)
免携带设备目标定位是利用目标人物对无线通信链路产生的阴影衰落来确定目标的位置,然而当环境发生变化时也会引起无线链路信号强度的变化,会影响定位精度。针对传统子空间去噪方法的不足,本文与指纹法相结合探讨了基于子空间分解的小波去噪方法。通过研究静态环境下的噪声特征,选取最大特征值作为信号分量的阈值,自适应地提取目标信号,有效地消除环境变化产生的影响。在线阶段通过计算实时接收信号强度和射频地图中数据信息之间的核距离进行匹配估计出目标的位置。最后通过实验对本文算法进行了仿真,结果表明本文提出的算法相比传统已有算法能达到更好的定位精度。
免携带设备的目标定位;指纹法;子空间分解;混合去噪;核距离
引 言
近几年来,随着无线传感网的出现,各种各样基于位置信息的服务在日常生活领域中得到迅速的发展,其中实现对人或物的精确定位是关键和前提。目前的定位技术大都要求被定位的目标携带特定设备(如RFID等)协助完成定位。然而在一些特定场合中,如智能家居、救援工作以及财产保护[1]等,不能保证目标人物能携带设备。因此研究免携带设备的目标定位成为当前的研究热点。免携带设备目标定位(Device-free localization, DFL)根据目标对无线链路产生的阴影衰落来进行定位,不需要目标携带任何设备。文献[1,2]首次描述了DFL的系统结构,将定位问题建模为指纹识别问题,通过比较当前实时的链路接收信号强度(Received signal strength, RSS)与存储在离线地图中的数据信息来估计目标的位置。Zhang[3]提出无线链路的椭圆覆盖模型,把目标影响链路最大的区域作为目标的位置。SPAN实验室的Patwari[4-5]借鉴工业CT的原理,将免携带设备目标定位问题建模为无线层析成像(Radio tomographic imaging, RTI)问题,并在图像重构过程中采用正则化的方法实现对逆问题的求解。Zhao[6]提出了基于信号强度直方图之间核距离的无线层析成像,用直方图之间核距离来代替信号强度的变化量实现目标定位。Wang[7]提出贝叶斯贪婪匹配追踪算法解决RTI中的病态求逆问题,重构出像素点上的阴影衰落向量。由于RTI在图像重建时只利用视距传播,针对室内的多径环境,相对于场景分析的指纹法,多径会带来更大的图像重构误差,导致定位性能下降。Zhao[8]通过实测数据分析把信号强度变化分成了内在和外在两部分因素,并利用子空间分解法降低了内在环境噪声的影响,再结合Tikhonov正则化的方法提高了基于RTI的定位精度。不同以上方法,本文在文献[8]的基础上将子空间分解和小波变换相结合,提出了基于子空间分解的小波去噪算法,并根据静态环境下噪声的最大特征自适应选取阈值,对环境变化具有更好的鲁棒性。在定位匹配过程中,本文基于贝叶斯原理采用核距离的方法估计免携带目标的位置坐标。最后通过实验证明了该算法的可行性,提高了定位系统的性能。
1 射频地图去噪处理
(1)

1.1 混合降噪法
小波变换具有多分辨率的特点和去数据相关性,它能够使信号能量集中在一些大的小波系数中,而噪声的能量却分布于整个小波域内。子空间去噪是将原始链路信号R通过协方差矩阵分解成两个相互正交的子信号,从而提取出目标信号Rs。结合子空间分解和小波变换的特性提出了混合去噪方案。
首先对静态环境下的t时刻链路信号R进行小波分解,设小波变化矩阵为W,即有
(2)
式中:Dt表示第t时刻链路信号进行小波分解得到的系数。在pi处的无线链路的信号强度的小波系数自相关矩阵表示为
(3)
再对式(3)中的矩阵C进行子空间特征值分解,其公式如下
(4)
式中:ui是相关矩阵第i个特征值λi的特征向量。
假设定位区域中无目标的状态称为静态环境,有目标的状态称为动态环境。对于动态环境,信号强度的变化是由目标和噪声两个因素共同引起的。在子空间分解中,前面较大的k个特征值体现的是目标引起的信号强度变化,较小的特征值主要反映噪声。利用子空间分解将原始链路信号系数Dt分解为噪声信号系数φn和目标信号系数φs
(5)
前k个特征值对应的特征向量组合为信号子空间U1=[u1, u2, …, uk],余下的U2=[uk+1, uk+2, ..., uL]为噪声子空间。根据子空间的原理将Dt通过正交基映射到φn,φs
(6)
最后将子空间处理过的小波系数进行逆小波变换得到去噪后的目标信号Rs,即有
(7)
1.2 特征阈值的自适应选取
在对小波系数进行子空间分解过程中,子空间分量个数k的选取是通过实验的方法得到,但是此方法费时费力,而且实时性不高。本文根据静态环境和动态环境对链路产生的影响不同提出自适应地选取子空间分量k。在静态环境中,首先对静态环境下的链路信号R进行小波变换,将变换后的小波系数D进行子空间特征分解,选取此时最大的特征值,有
(8)
在动态环境中,采集此时的链路信号并进行同样的处理得到特征值λ,相对环境噪声而言,目标引起RSS的变化幅值要大,把λ0作为阈值,将特征值λ小于阈值λ0的成分当成噪声进行处理,大于阈值λ0的为目标信号成分。此方法通过特征值自适应的比较能将链路信号成分映射到两个相互正交的子空间中,针对环境的变化此方法具有很好的鲁棒性。因此经过混合去噪后在参考点pi处的n个样本的射频地图矩阵可以表示为
(9)
2 基于核距离的匹配算法

核方法广泛应用于携带设备的定位[9-10]中,对在低维空间线性不可分的模式通过非线性映射到高维的特征空间中进行线性可分。根据其定义有
(10)
式中:K(·)为核函数。本文匹配算法是利用指纹匹配中对邻近参考点的加权平均估计目标位置
(11)
(12)

常见核函数选取有多项式、径向基核函数[11-12]等,试验证明,目标引起通信链路信号强度的变化往往呈现高斯或类高斯分布,因此本文选取高斯径向基核函数来计算,其表达式为
(13)
式中:x,y表示输入向量,σ表示高斯核宽度,将式(13)代入到式(12),可以得到目标的位置pobject。
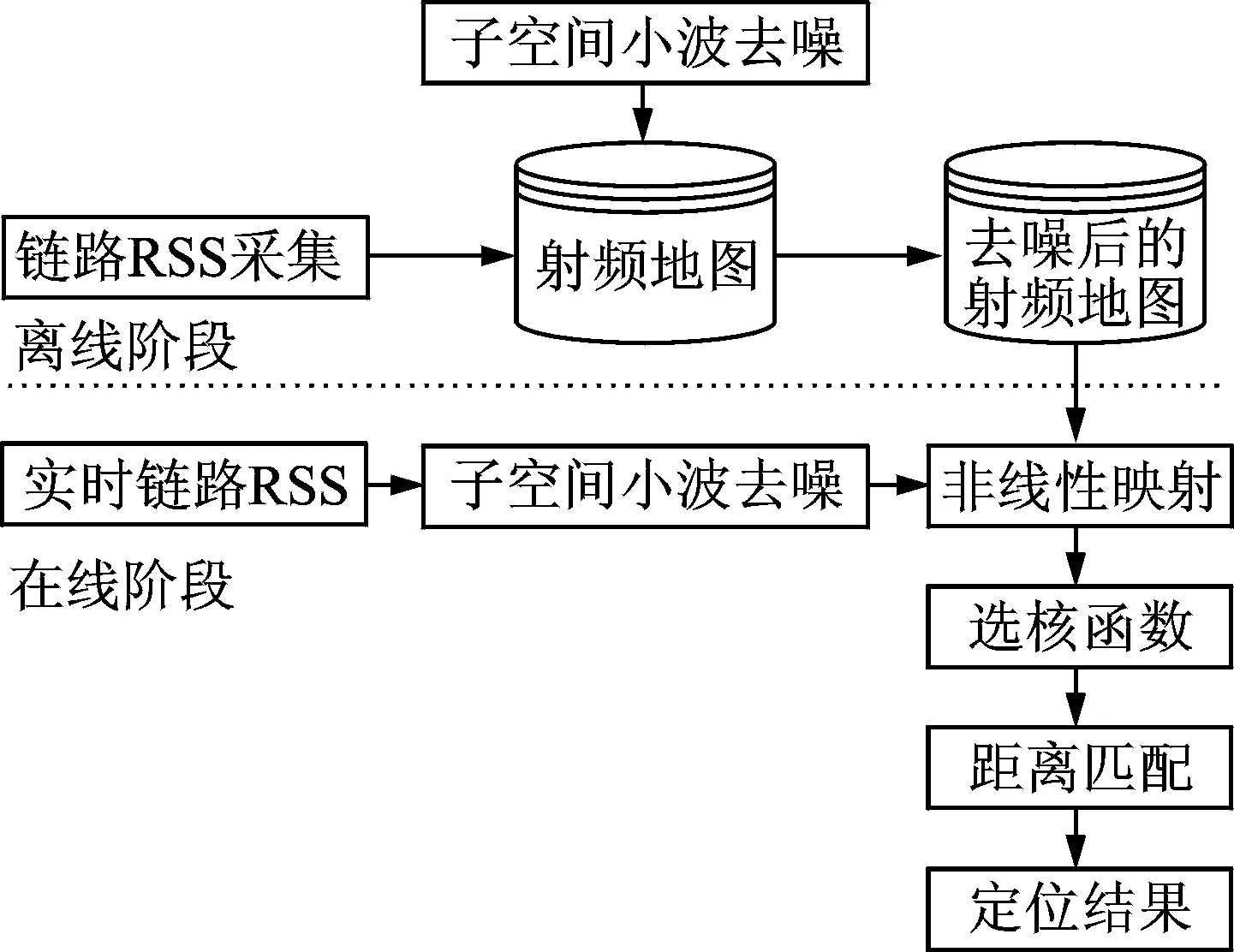
图1 基于指纹的算法流程图Fig.1 Flowchart of the proposed algorithm based on fingerprint
3 实验结果与分析
3.1 实验环境布局
为了验证本文提出算法的性能,本文主要在上海大学行健楼布置传感节点并进行数据的采集,也采用犹他大学SPAN实验室提供的数据进行了仿真。实测环境布局如图2。实测数据采用的节点是TI CC2530无线节点,采用IEEE802.15.4协议和2.4 GHz频率。此实验定位区域为4 m×4 m,在两边各布置4个传感器节点,相间隔1 m,节点间通信链路个数为L=28,在该定位区域选取P=9个参考点,每个参考点相隔1 m,每条通信链路的样本个数为n=50。在本次试验过程中,为了试验环境搭建简便,其定位的目标对象皆为人,且暂时不考虑目标的形状体积等其他因素的影响。
3.2 实验结果分析
图3给出了在单目标情况下,本文算法和已有算法的定位误差累积概率分布图。其定位精度在1 m内时,本文提出的混合去噪性能比单独子空间降噪性能要好,其中基于混合去噪的核距离方法、RTI方法和KNN方法比基于子空间去噪的方法各自提高了约2%,3%和10%。

图2 实测定位区域图Fig.2 Real time locating environment
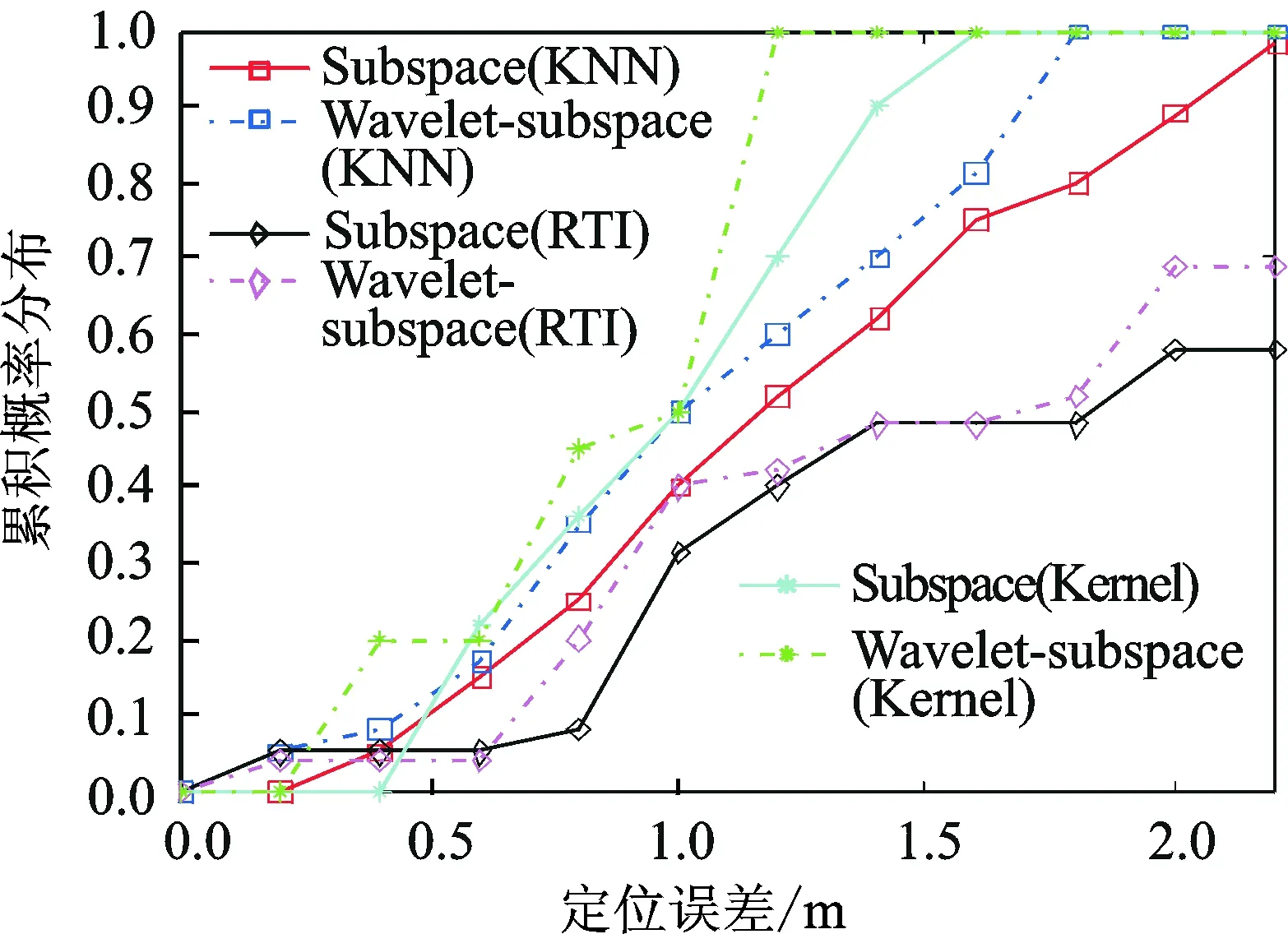
图3 定位误差累积概率分布图Fig.3 Cumulative distribution function(CDF) of localization errors
图4表示在实测数据下平均定位误差随参考点采样样本数情况,其中本文基于核函数方法随着样本数的增加其定位性能更好,而基于RTI的正则化定位算法的误差较大。因为RTI主要是根据信号的衰减成像,而静止的目标对链路的衰减相对较小[6]。图5给出了系数矩阵的特征值,其中虚线表示的是静态环境,实线表示的是动态环境。图中显示在静态环境中,整个链路受影响的只有噪声,在动态环境中,目标引起链路RSS的变化幅度比噪声要大。把静态环境下最大的特征值作为阈值,在动态环境中小于该阈值的成分作为噪声进行处理,自适应选取子空间分量k,提高环境变化的鲁棒性。
图4 平均定位误差随采样样本数变化情况
Fig.4 Performance under different numbers of measurements

图5 实测数据Fig.5 Measured data at Shanghai University
表1是对不同算法的时间复杂度和算法运行时间进行比较,其中L表示定位区域内参与定位的链路个数,P表示参考点的个数,N表示RTI重构算法中对定位区域划分像素方格的个数(本文仿真试验中设定N=20),n表示每条链路采集的信号强度的样本个数。在HP CQ40笔记本(2.1 GHz的Intel Pentium处理器,2 GB内存)上进行20次实验,不同算法的运行时间如表1的第5列所示,虽然本文算法的计算复杂度相比其他算法有所增加,但是却大大提高了定位精度,从而具有一定的实时性。

表1 不同算法的时间复杂度分析
4 结束语
本文针对环境内部原因如温度、传感器摇曳对接收信号产生的影响,利用基于子空间分解和小波去噪的各自特性,提出了混合去噪方案,通过自适应的选取子空间分量,对环境变化具有更好的鲁棒性,根据指纹在线匹配原则计算实时信号强度和射频地图中的数据信息之间的核距离来估计目标的位置坐标。最后试验结果表明,本文所提的算法能得到较好的定位精度,从而证明该算法的可行性。
[1] Youssef M, Mah M, Agrawala A. Challenges: Device-free passive localization for wireless environments[C]//Proceedings of the 13th Annual ACM International Conference on Mobile Computing and Networking. Montreal, Canada:[s.n.], 2007:222-229.
[2] Seifeldin M, Saeed A, Kosba A E, et al. Nuzzer: A large-scale device-free passive localization system for wireless environments[J]. IEEE Transactions on Mobile Computing, 2013, 12(7): 1321-1334.
[3] Zhang D, Liu Y, Guo X, et al. RASS: A real-time accurate and scalable system for tracking transceiver-free objects[J]. IEEE Transactions on Parallel and Distributed Systems, 2013, 24(5): 996-1008.
[4] Wilson J, Patwari N. Radio tomographic imaging with wireless networks[J]. IEEE Transactions on Mobile Computing, 2010, 9(5): 621-632.
[5] Wilson J, Patwari N. See through walls: Motion tracking using variance-based radio tomography networks[J]. IEEE Transactions on Mobile Computing, 2011, 10(5): 612-621.
[6] Zhao Y, Patwari N, Phillips J M, et al. Radio tomographic imaging and tracking of stationary and moving people via kernel distance[C]// Proceedings of the 12th International Conference on Information Processing in Sensor Networks.[S.l.]: ACM, 2013: 229-240.
[7] Wang J, Zhang X, Gao Q, et al. Device free localization with wireless networks based on compressive sensing[J]. Communications, IET, 2012, 6(15): 2395-2403.
[8] Zhao Y, Patwari N. Noise reduction for variance-based device-free localization and tracking[C]//Sensor, Mesh and Ad Hoc Communications and Networks (SECON), 2011 8th Annual IEEE Communications Society Conference on.[S.l.]: IEEE, 2011: 179-187.
[9] Mahfouz S, Mourad-Chehade F, Honeine P, et al. Kernel-based localization using fingerprinting in wireless sensor networks[C]//Signal Processing Advances in Wireless Communications (SPAWC), 2013 IEEE 14th Workshop on.[S.l.]: IEEE, 2013: 744-748.
[10]Kushki A, Plataniotis K N, Venetsanopoulos A N. Kernel-based positioning in wireless local area networks[J]. IEEE Transactions on Mobile Computing, 2007, 6(6): 689-705.
[11]李文元,解明辉.核空间的LMS自适应多用户检测技术[J].数据采集与处理,2012,27(2):225-150.
Li Wenyuan, Xie Minghui. Kernel space-based LMS multi-user detection technology[J]. Journal of Data Acquisition and Processing, 2012,27(2):225-150.
[12]卞金洪,王吉林,于威风,等.基于核主分量分析和典型相关分析的语音情感识别[J].数据采集与处理,2014,29(2): 238-242.
Bian Jinhong, Wang Jilin, Yu Weifeng, et al. Speech emotion recognition based on KPCA and CCA[J]. Journal of Data Acquisition and Processing, 2014,29 (2): 238-242.
Device-Free Localization Based on Mixed Subspace Denoising
Liu Kai1, Fang Xiaojun1, Zhang Bin2
(1.Key Laboratory of Specialty Fiber Optics and Optical Access Networks, Shanghai University, Shanghai, 200072, China;2.Expressway Network Toll Center, Hubei Province, Wuhan, 430000, China)
Device-free localization (DFL) utilizing the received signal strength (RSS) variations on the wireless link caused by an object is the estimation of the object such as a person without carrying any electronic device. However, environment influences, such as temperature or swaying of sensor nodes, also alter RSS variations, thus degrading the positioning accuracy. A novel wavelet denoising algorithm based on subspace decomposition, combined with the fingerprint method, is proposed to reduce the environment impact. The noise characteristics of static environment are researched, then the maximum characteristic value is extracted as threshold, the signal features are adaptively decomposed into different orthogonal subspaces and the object signal is reconstructed in subspace. The feather extraction method is discussed after the mixed denoising analysis. Gaussian radial basis function is utilized to calculate the kernel distance between online measurement received signal strength and the fingerprint data to estimate the target location coordinate. Simulation results indicate that the proposed algorithm can achieve better positioning accuracy than the traditional location algorithm.
device-free localization; fingerprint method; subspace decomposition; mixed denoising; kernel distance
国家自然科学基金(61501288)资助项目;上海市自然科学基金(15ZR1415500)资助项目。
2013-12-07;
2014-06-09
TN911.7
A

刘凯(1981-),男,副教授,硕士生导师,研究方向:盲信号处理、通信信号处理和室内无线定位,E-mail:liukai@shu.edu.cn。

方小俊(1990-),男,硕士研究生,研究方向:室内免携带定位算法。

张斌(1981-),男,工程师,研究方向:高速信息系统。